استجابة عابرة
تكون الاستجابة العابرة أو الاستجابة الطبيعية في الهندسة الكهربائية والهندسة الميكانيكية، هي استجابة نظام لتغيير من حالة الاتزان. وليس بالضرورة أن ترتبط الاستجابة العابرة بعمليات «التشغيل والإيقاف» ولكنها ترتبط بأي حدث يؤثر على حالة اتزان النظام. فكل من الاستجابة النبضية واستجابة الخطوة عبارة عن استجابة عابرة لمدخل معين (نبضة وخطوة على التوالي).
التخميد
يمكن تصنيف الاستجابة كأحد أنواع التخميد الثلاثة التي تصف الخرج بالنسبة إلى استجابة حالة الاستقرار.
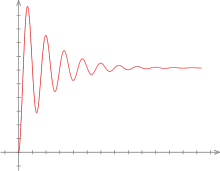
إن الاستجابة ناقصة التخميد هي الاستجابة التي تتذبذب في إطار تحلل الغلاف. وكلما زاد نقص تخميد النظام، زادت التذبذبات واستغرقت وقتًا أطول حتى تصل إلى حالة الاستقرار. وهنا تكون نسبة التخميد دائمًا.
إن الاستجابة المخمدة بشكل حرج هي تلك الاستجابة التي تصل إلى قيمة الاستقرار في أسرع وقت ممكن دون أن تصبح ناقصة التخميد. وترتبط تلك الاستجابة بـ النقاط الحرجة من حيث إنها تمتد عبر حدود الاستجابات ناقصة التخميد وزائدة التخميد. وهنا تكون نسبة التخميد دائمًا مساوية للواحد. وينبغي ألا يكون هناك تذبذب حول قيمة حالة الاستقرار في الحالة المثالية.
إن الاستجابة زائدة التخميد هي تلك الاستجابة التي لا تتذبذب حول قيمة حالة الاستقرار ولكنها تستغرق وقتًا أطول للوصول إلى تلك القيمة، أطول من الحالة المخمدة بشكل حرج. وهنا تكون نسبة التخميد.
الخصائص
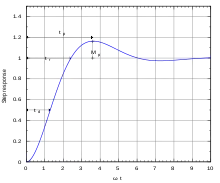
زمن الصعود
- زمن الصعود يشير إلى الزمن اللازم لتتغير الإشارة من قيمة منخفضة معينة إلى قيمة مرتفعة معينة. وبصورة نموذجية، تكون تلك القيم بنسبة 10% و90% من ارتفاع الخطوة.
التجاوز : التجاوز هو عندما تتجاوز إشارة أو دالة هدفها. ويرتبط التجاوز في الغالب بـ الرنين. زمن الترسيب
- زمن الترسيب هو الوقت المنصرم بين استخدام دخل خطوة لحظية مثالية وزمن دخول الخرج وبقائه داخل نطاق خطأ معين.
زمن التأخير : زمن التأخير هو الوقت اللازم لتصل الاستجابة إلى نصف القيمة النهائية في أقرب وقت ممكن.[1] زمن الذروة
- زمن الذروة هو الوقت اللازم لتصل الاستجابة إلى أول ذروة في التجاوز.[1]
خطأ حالة الاستقرار
المراجع
- Ogata, Katsuhiko، Modern Control Engineering، Prentice-Hall، ص. 230، ISBN 0-13-043245-8.
{{استشهاد بكتاب}}: الوسيط غير المعروف|ed=تم تجاهله (مساعدة) - Lipták, Béla G. (2003)، Instrument Engineers' Handbook: Process control and optimization (ط. 4th)، CRC Press، ص. 108، ISBN 0-8493-1081-4.
 بوابة هندسة
بوابة هندسة