تحكم حركي
التحكم الحركي (بالإنجليزية: Motor control) هو تنظيم الحركة لدى الكائنات التي تحتوي على جهاز عصبي، ويشمل التحكم في المنعكسات والحركات الإرادية معا.[1]
للتحكم في الحركة، يجب على النظام العصبي أن يكامل عدة معلومة حسية متعددة الوحدات الحسية (بصرية، سمعية، شمية) من المحيط الخارجي ومن الإحساس الذاتي الداخلي أيضا واستخلاص الإشارات الضرورية لتوظيف العضلات أو لتنفيذ الهدف حسب الحالة (كالابتعاد عن السكة عند سماع صوت القطار). ينبثق من هذا المسار عدة فروع منها: تكامل التعدد الحسي [الإنجليزية]، معالجة الإشارة، التنسيق الحركي، الميكانيكا الحيوية والمعرفة.[2][3] التحكم الحركي الناجح أمر حاسم للتأقلم في المحيط وكذلك لتنفيذ الأهداف وتنظيم التوازن والاستقرار.
تغذية راجعة حسية حركية
الاستجابة للمنبهات
تتم عملية إدراك منبهاتٍ حسيةٍ واستخدام المعلومة التي تستخلص منها لإجراء حركة على عدة مراحل. يمكن أن يُستخدم زمن ردة الفعل في الأعمال البسيطة للكشف عن معلومات حول هذه المراحل. يُقصد بزمن ردة الفعل الوقت المستغرق بين تواجد المنبه وإدراكه وبين نهاية الاستجابة له، وزمن الحركة هو الوقت المستغرق لإكمال الحركة. أُجريت أول تجارب زمن ردة الفعل بواسطة فرانسيس دوندرز الذي استخدم أزمنة ردة فعل مختلفة حول عمل معين لتحديد مدة الزمن المطلوبة لمعالجة المنبهات واختيار الاستجابة الصحيحة.[4] مع كون هذا النهج خاطئا في النهاية، إلا أنه أفضى إلى ظهور فكرة أن زمن الاستجابة يتكون من تحديد المنبه والتعرف إليه، متبوعا باختيار استجابة له، وفي الأخير القيام بالحركة الصحيحة. وفرت مزيد من الأبحاث دليلا حول أن هذه المراحل الثلاثة تتواجد فعلا وأن مدة اختيار الاستجابة لأي زمن ردة فعل تزيد بزيادة عدد الخيارات المتاحة، وهي علاقة تعرف بقانون هيك.[5]
تحكم الحلقة المغلقة
يأتي التعريف التقليدي لنظام الحلقة المغلقة الخاص بحركات البشر من قبل جاك إيه. آدامز (1971): يقارن مرجع المخرجات المرغوبة بالمخرجات الفعلية عبر آليات كشف الأخطاء، باستخدام التغذية الراجعة (الارتجاع)، ويُصحح الخطأ. تتشكل معظم الحركات التي تتم عبر النشاط اليومي من خلال معالجة مستمرة للمعلومات الحسية الإضافية واستخدامها بشكل أكثر دقة، إذ يضمن استمرار الحركة. يدعى هذا النوع من التحكم الحركي بتحكم التغذية الراجعة، إذ يعتمد على التغذية الحسية الراجعة من أجل التحكم بالحركات. التحكم بالتغذية الراجعة هو صيغة موحدة من التحكم الحركي، بالاعتماد على المعلومات الحسية حول الأداء والمدخلات الحسية الخاصة من البيئة التي تحدث فيها الحركة. لا يسبب هذا المدخل الحسي، خلال معالجته، بالضرورة إدراكًا واعيًا بالحركة. تحكم الحلقة المغلقة هو تحكم حركي بآلية تعتمد على التغذية الراجعة، إذ تخلق أي حركة نوعًا من التغيير في المحيط الذي يؤثر على الأداء المستقبلي من خلال التغذية الراجعة. يعتبر تحكم الحلقة المغلقة الحركي الأنسب من أجل استمرار التحكم بالحركات، لكنه لا يعمل بسرعة كافية فيما يخص الحركات القذفية.[6][7]
الحركات القذفية هي الحركات التي تستمر حتى نهايتها دون التفكير بها، حتى عندما تكون غير لائقة. يعتبر تحكم التغذية الراجعة بطيئًا بصفته معالجة حسية؛ لأنه يعتمد على المعلومات الحسية. تُلزم هذه الحركات بسرعة/دقة المفاضلة، بسبب استخدام المعالجة الحسية من أجل التحكم بالحركة، وكلما كانت الحركة أسرع، أصبحت أقل دقة.
تحكم الحلقة المفتوحة
التعريف التقليدي من قبل جاك إيه. آدامز هو: «لا يمتلك نظام الحلقة المفتوحة تغذية راجعة أو آلية لتنظيم الأخطاء. تمارس أحداث المدخلات الخاصة بالنظام تأثيرها، ويؤثر النظام على تحويلاته الخاصة بالمدخلات ويمتلك النظام مخرجات... تزيد إشارات المرور ذات التوقيت الثابت من حركة السير عندما يكون الحمل ثقيلًا وتعيق المرور عندما تكون حركة السير خفيفة. لا يمتلك النظام قدرة تعويضية».[8]
مع ذلك، تحدث بعض الحركات بسرعة كبيرة من أجل دمج المعلومات الحسية، ويجب أن تعتمد على تحكم الارتجاع المسبق «Feed-forward». تحكم الحلقة المفتوحة هو صيغة تحكم حركي بالارتجاع المسبق، يُستخدم من أجل التحكم السريع، والحركات القذفية التي تنتهي قبل معالجة أي معلومات حسية. من أجل أفضل دراسة لهذا النمط من التحكم، يركز معظم الباحثين على دراسات إزالة التدفعات الواردة الحسية، التي غالبًا ما تضم قططًا أو قرودًا فُصلت أعصابهم الحسية من حبالهم الشوكية. استمرت القردة التي خسرت كافة المعلومات الحسية من اليدين بسلوكها الطبيعي بعد التعافي من عملية إزالة التدفعات الواردة الحسية. كانت معظم المهارات قابلة للتعلم مجددًا، لكن التحكم الحركي الدقيق أصبح صعبًا جدًا. لوحظت إمكانية التأقلم في تحكم الحلقة المفتوحة في حالات مرضية مختلفة؛ لذا قد يُستخدم ذلك في استخلاص علامات خاصة بمختلف الاضطرابات الحركية من خلال القيمة الوظيفية التي تحكم النظام.[9][10]
التنسيق
القضية الجوهرية في التحكم الحركي هي التنسيق بين مختلف مكونات الجهاز الحركي من أجل تحقيق اتساق يضمن الحركة. الجهاز الحركي معقد للغاية، يتألف من العديد من الأجزاء المتفاعلة في عدة مستويات تنظيمية مختلفة.
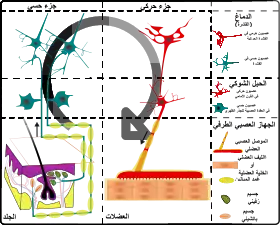
تستقبل العصبونات المحيطية مدخلات من الجهاز العصبي المركزي وتعصب العضلات (أي تغذيها عصبيًا). بالمقابل، تولد العضلات قوى تحرك المفاصل. يعتبر تحقيق عمل هذه الأجزاء مع بعضها مشكلة حقيقية للجهاز الحركي، وتعتبر كيفية حل هذه المشكلة مجال بحث فعال في أبحاث التحكم الحركي.
المنعكسات
في بعض الحالات يكون التنسيق بين المكونات الحركية فائق التشابك، إذ يتكون من سبل عضلية عصبية ثابتة تدعى المنعكسات. تتظاهر المنعكسات نموذجيًا باستجابات ذاتية وحركية ثابتة، وتحدث بمقياس زمني أسرع من ردود الفعل المحتملة التي تعتمد على المعالجة الحسية. تلعب المنعكسات دورًا أساسيًا في تثبيت الجهاز الحركي، وتأمين المعاوضة الفورية للاضطرابات الصغيرة والحفاظ على أنماط تنفيذ ثابتة. توجه بعض حلقات المنعكس فقط من خلال الحبل الشوكي دون تلقي مدخلات من الدماغ، لذا لا تتطلب الانتباه أو التحكم الواعي. يشمل بعضها الآخر مناطق منخفضة من الدماغ وقد تتأثر بالتعليمات أو النوايا المسبقة، لكنها تبقى مستقلة عن المعالجة الحسية والتحكم الفوري.[11]
أبسط المنعكسات هو المنعكس أحادي المشبك أو منعكس الحلقة القصيرة، مثل استجابة الشد أحادية المشبك. في هذا المثال، تُفعل العصبونات الواردة من خلال المغازل العضلية عندما يتغير شكلها وفقًا لشد العضلة. في الحبل الشوكي، تتشابك هذه العصبونات الواردة بشكل مباشر مع عصبونات ألفا المحركة التي تنظم تقلص العضلة ذاتها. فيشير أي شد للعضلة بشكل تلقائي منعكس تقلص إلى تلك العضلة، دون أي تحكم مركزي. وكما يصفها الاسم، تعتمد المنعكسات أحادية المشبك على اتصال مشبك وحيد بين العصبون الحسي الوارد والعصبون المحرك الصادر. بشكل عام تكون حركات المنعكسات أحادية المشبك ثابتة ولا يمكن التحكم بها أو التأثير عليها وفقًا للنية أو التعليمات. ومع ذلك، ثمة بعض الأدلة التي تشير إلى إمكانية تعديل الكسب الكهربائي أو حجم ردود فعل هذه المنعكسات بحسب السياق والتجربة.[12][13]
المنعكسات عديدة المشابك أو منعكسات الحلقة الطويلة هي أقواس منعكسات تشمل أكثر من اتصال مشبكي واحد في الحبل الشوكي. تتضمن هذه الحلقات مناطق قشرية من الدماغ كذلك الأمر، لذا تكون أبطأ من مقابلاتها أحادية المشبك وفقًا لزيادة زمن الانتقال. ومع ذلك، ما زالت الأفعال المحكمة من قبل حلقات المنعكس عديد المشابك أسرع من الحركات التي تتطلب معالجة حسية. وبينما تكون حركات الحلقة القصيرة ثابتة، قد تُنظم غالبًا المنعكسات عديدة المشابك عبر التجربة السابقة أو التعليمات. من الأمثلة الشائعة حول منعكس الحلقة الطويلة هو المنعكس الموتر للرقبة غير المتناظر الملاحظ عند الرضع.[14][15]
التآزرات
التآزر الحركي هو تنظيم عصبي للجهاز عديد العناصر الذي (1) ينظم مشاركة المهمة بين مجموعة من المتغيرات الأولية، و(2) يتأكد من التباين المشترك بين المتغيرات الأولية وهدف تثبيت متغيرات الأداء.[16][17] تحتاج مكونات التآزر ألا تكون متصلة جسديًا، وإنما متصلة بفضل الاستجابة للمعلومات الحسية حول تنفيذ مهمة حركية معينة. يمكن تعلم التآزرات، عوضًا عن أن تكون متشابكة بشكل فائق مثل المنعكسات، ومنظمة وفق الاعتماد على المهام، إذ يكون التآزر بنيويًا بالنسبة لحركة معينة وغير محدد بشكل عام بالنسبة لمكوناته ذاتها. استعرض نيكولاي بيرنشتاين بشكل مشهور عمل التآزرات في الحركات المطرقية (الدق) للحدادين المحترفين. يعتبر تحكم عضلات الذراع بحركة المطرقة مرتبطًا من ناحية المعلومات بطريقة تُعوض فيها الأخطاء والتباينات في عضلة واحدة بشكل تلقائي من خلال حركات عضلات أخرى. تشبه هذه الحركات التعويضية المنعكسات، إذ تحدث بشكل أسرع مما تسمح به المعالجة الحسية، ومع ذلك توجد فقط في أداء الاحترافيين لا المبتدئين. في حالة الحدادين، يُنظم التآزر بشكل خاص من أجل الحركات المطرقية لا لتنظيم عضلات الذراع ذات الغاية عامة. يمتلك التآزر خاصتين محددتين -إضافة إلى أنه معتمد على المهمة- هما المشاركة والمرونة/ الاستقرار.[18]
مراجع
- Sibson, Francis (1850)، "On The Causes Which Excite And Influence Respiration In Health And Disease."، The Transactions of the Provincial Medical and Surgical Association، 5 - New Series: 181–350، مؤرشف من الأصل في 16 ديسمبر 2019،
In all these instances the act of inspiration is excited through the reflex function of the nervous system -- the sudden impression made on the skin stimulates the extremities of the incident nerves; the stimulus is conveyed by the incident nerves to the spinal nervous centre, and is thence transmitted back over the motor nerves of inspiration. That these respiratory movements are purely excito-motor, and performed without the intervention of sensation, in many of those instances in which the excited movements are most energetic, is proved by the case with which remarkable movements of respiration were occasioned by stimulating the surface in cases of syncope, hysteria, and epilepsy, cases in which sensation was altogether absent, and was only restored after repeatedly stimulating the surface, and so inducing deep reflex inspirations again and again by exciting the incident nerves. [Page 206]
- Rosenbaum, David A. (1991)، Human motor control، San Diego, CA: Academic Press، ص. 411، ISBN 978-0-12-597300-7.
- Wise؛ Shadmehr (10 يوليو 2002)، "Motor Control"، Encyclopedia of the Human Brain، Academic Press، ص. 137–157، ISBN 978-0122272103.
{{استشهاد بكتاب}}: صيانة CS1: التاريخ والسنة (link) - Donders (1969)، "On the speed of mental processes." (PDF)، Acta Psychol (Amst)، 30: 412–31، doi:10.1016/0001-6918(69)90065-1، PMID 5811531، مؤرشف من الأصل (PDF) في 7 أكتوبر 2016.
- Hick (1952)، "On the rate of gain of information"، Quarterly Journal of Experimental Psychology، 4 (1): 11–26، doi:10.1080/17470215208416600.
- J.A. Adams. A closed loop theory of motor learning. In: Journal of Motor Behavior 3 (1971) p 116. This is also quoted in: Jack A. Adams, Issues for a Closed Loop Theory of Motor Learning. In: George E. Stelmach (Ed.) Motor Control, Issues and Trends. Academic press. New York 1976. p 89
- Richard A. Schmidt: Motor control and Learning. Human Kinetics Publishers, Champaign, Illinois 1982, p 186
- J.A. Adams. A Cllosed Loop Theory of Motor Learning. In: Journal of Motor behavior 3 (1971) p 116. Also quoted in: Jack A. Adams, Issues for a Closed Loop Theory of Motor Learning. In: George E. Stelmach (Ed.) Motor Control, Issues and Trends. Academic press. New York 1976. p 89
- Taub, Edward؛ Steven J. Ellman؛ A. J. Berman (فبراير 1966)، "Deafferentation in Monkeys: Effect on Conditioned Grasp Response"، Science، 151 (3710): 593–594، doi:10.1126/science.151.3710.593.
- Unni, Midhun P.؛ Sinha؛ Chakravarty؛ Chatterjee؛ Das (2017)، "Neuromechanical Cost Functionals Governing Motor Control for Early Screening of Motor Disorders"، Frontiers in Bioengineering and Biotechnology (باللغة الإنجليزية)، 5: 78، doi:10.3389/fbioe.2017.00078، ISSN 2296-4185، PMC 5733372، PMID 29326926.
- Dewhurst DJ (1967)، "Neuromuscular control system."، IEEE Trans Biomed Eng، 14 (3): 167–71، doi:10.1109/TBME.1967.4502494، PMID 6080533.
- Pearson؛ Gordon (2000)، "Spinal reflexes"، Principles of Neuroscience، New York, NY: McGraw-Hill، ص. 713–736
- Matthews PB (1986)، "Observations on the automatic compensation of reflex gain on varying the pre-existing level of motor discharge in man."، J Physiol، 374 (1): 73–90، doi:10.1113/jphysiol.1986.sp016066، PMC 1182707، PMID 3746703، مؤرشف من الأصل في 12 مارس 2020.
- Evarts EV (1973)، "Motor cortex reflexes associated with learned movement."، Science، 179 (4072): 501–3، doi:10.1126/science.179.4072.501، PMID 4196171.
- Latash؛ Scholz؛ Schöner (2007)، "Toward a new theory of motor synergies"، Motor Control، 11 (2): 276–308، doi:10.1123/mcj.11.3.276، PMID 17715460.
- Alnajjar؛ Wojtara؛ Kimura؛ Shimoda (2013)، "Muscle synergy space: learning model to create an optimal muscle synergy."، Frontiers in Computational Neuroscience، 7: 136، doi:10.3389/fncom.2013.00136، PMC 3796759، PMID 24133444.
- Latash, Mark (2008)، Synergy، Oxford, NY: Oxford University Press، ص. 412.
 بوابة علوم عصبية
بوابة علوم عصبية