توازن ميكانيكي
في علم السكون، التوازن الميكانيكي (بالإنجليزية: Mechanical Equilibrium) للنظام أنواع، منها التوازن المستقر والتوازن غير المستقر. فالقلم مثلا إذا وُضع رأسيا فبقي متوازنا في حالة توازن غير مستقر، لأن طاقته الوضعية ليست صفرا. ولكن القلم إذا وُضع على جنبه لم يمكن له السقوط لأن طاقته الوضعية صفر وإذن فإنه في حالة توازن مستقر.
نبذة من الأسس
التوازن المستقر تكون فيه جميع جسيمات النظام في حالة سكون، وتكون أيضا جميع القوى المؤثرة على أي جسيم فيه مساوية للصفر.[1] وأحيانا يقصد التوازن المستقر عندما يُقال مجرد ((توازن)). ولكن التوازن عموما تعريفه كالآتي:[2] يتحتم لكي يكون جسيم في حالة توازن ميكانيكي أن تكون محصلة القوى المؤثرة علية مساوية للصفر .[3]
والظروف التي تؤدي إلى توازن ميكانيكي لنظام من الجسيمات هي:
- 1) أن تكون محصلة جميع القوى الخارجية عليه مساوية للصفر.


وعندما نطبق تلك التعريفات على جسم جاسئ نجد أن الظروف الضرورية لكي يكون الجسم في حالة توازن ميكانيكي هي عندما تكون محصلة جميع القوى المؤثرة على جميع جسيماته مساوية لصفر، أي أن مجموع عزوم الدوران المؤثرة على جميع جسيمات انظام مساوية أيضا للصفر.[4][5]

يكون الجسم الجاسئ في حالة «توازن ميكانيكي» عندما لا يكون متحركا ولا يكون في حالة دوران ولا في حالة تعجيل، (ولكن قد يعتبر أيضا في حالة توازن ميكانيكي إذا كانت له حركة انتقالية منتظمة أو حركة دورانية بسرعة منتظمة).
طريقة حسابية
من حساب التفاضل نتعرف على وجود نهاية عظمى أو وجود نهاية صغرى لدالة تفاضلية عندما يكون المشتق الأول للتفاضل مساويا للصفر. ولكي نعرف عما إذا كانت تلك النقطة نهاية عظمى أم صغرى فإننا نقوم بإجراء التفاضل مرة أخرى للحصول على المشتق الثاني. وعلاقة ذلك بالتوازن المستقر هي كالآتي:
- المشتق التفاضلي الثاني < 0:
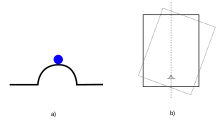
تكون طاقة الوضع في حالة نهاية عظمى، مما يعني أن النظام يوجد في حالة غير مستقرة. فأي حركة للجسم تؤدي إلى انزلاقه من وضع التوازن، وتعمل القوى المؤثرة على استمرار حركته إلى أسفل.

- المشتق التفاضلي الثاني > 0:
تكون طاقة الوضع في حالة نهاية صغرى. وهذا معناه أن النظام يوجد في حالة استقرار. وأي حركة للنظام تجعله يعاود الوصول إلى حالة الاستقرار . فإذا وجدت للنظام عدة حالات من الاستقرار فإن حالات الاستقرار التي تكون طاقة وضعها أعلى من طاقة الوضع الصغرى تعتبر حالات «شبه مستقرة» metastable states.
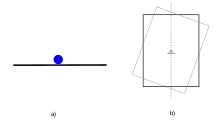
- المشتق التفاضلي الثاني = 0:
أو لا يوجد: فلا يمكن الاعتماد على المشتق الثاني ونعود إلى المشتق الأول ونفحصه. فعند تلك النقطة قد نجد واحدة من الحالتين السابقتين، وبالإضافة لهما فتوجد حالة ثالثة وهي: قد توجد منطقة تكون فيها الطاقة ثابته غير متغيرة، وفي تلك الحالة قد يوجد توازن تقريبي. عندئذ إذا أزحنا النظام قليلا عن موضعه فإنه يتخذ وضعا جديدا مشابها.
حالة نقطة السرج
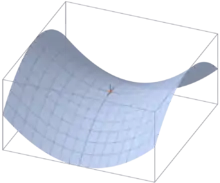

عندما نتعامل مع التوازن في حالة إحداثيات ثنائية المقاييس، فقد نحصل على نتائج مختلفة في الاتجاهات المختلفة. فعلى سبيل المثال لنفحص حالة إزاحة جسم في الاتجاه x فقد نجد النظام متوازن فيه ولكن غير متوازن في الاتجاه y . هذه الحالة تعرف بنقطة السرج. ولهذا فإننا نقول أن حالة الاتزان الميكانيكي يجب أن تكون مستقرة في جميع الاتجاهات.
المراجع
- Herbert Charles Corben & Philip Stehle (1994)، Classical Mechanics (ط. Reprint of 1960 second)، Courier Dover Publications، ص. 113، ISBN 0486680630، مؤرشف من الأصل في 1 مايو 2020.
- Lakshmana C. Rao, J. Lakshminarasimhan, Raju Sethuraman, Srinivasan M. Sivakumar (2004)، Engineering Mechanics، PHI Learning Pvt. Ltd.، ص. 6، ISBN 8120321898، مؤرشف من الأصل في 1 مايو 2020.
{{استشهاد بكتاب}}: صيانة CS1: أسماء متعددة: قائمة المؤلفون (link) - John L Synge & Byron A Griffith (1949)، Principles of Mechanics (ط. 2nd)، McGraw-Hill، ص. 45–46.
- Mechanical Equilibrium نسخة محفوظة 5 أكتوبر 2012 على موقع واي باك مشين.
- The torque is taken with respect to some reference point. Because the sum of the forces is zero the total torque is independent of the choice of this point.
انظر أيضا
 بوابة طب
بوابة طب بوابة علوم عصبية
بوابة علوم عصبية بوابة رياضيات
بوابة رياضيات بوابة الفيزياء
بوابة الفيزياء