ستة درجات حرية
6 درجات حرية في الفيزياء والهندسة (بالإنجليزية :Six degrees of freedom أو 6DoF) هي إمكانيات حركة جسم مصمت في المكان الثلاثي الأبعاد، فبإمكان الجسم الحركة إلى الأمام/والخلف، وإلى اليسار/واليمين، وإلى أعلى/أسفل (تلك ثلاثة حركات انتقالية). بالإضافة إلى ذلك دورانه حول نفسه: حول محور الأفقي، وحول المحور الرأسي، وحول العمودي عليهما.
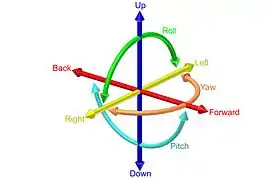
وطالما كانت الحركة الانتقالية في الثلاثة اتجاهات لا تعتمد على بعضها البعض، وكذلك الثلاثة أمكانيات لدوران الجسم حول ثلاثة محاور متعامدة، فينتج أن للجسم 6 درجات حرية، وتعامل الجسيمات في الفيزياء والكيمياء بأخذ تلك الدرجات في الحسبان عند حساب حركة ذرات غاز أو ضغط الغاز.
الإنسان الآلي
تميز الإنسان الآلي بين بعضها البعض بما لها من إمكانيات حركة (حرية حركة) وفي كثير من الأحوال يكون لها أكثر من ثلاثة درجات حرية للحركة. وتتيح تلك الحرية في الحركة للإنسان الآلي إمكانية حمل قطعة من جهاز وتركيبها وذلك بذراع واحد . من هنا يتبين ما هو المقصود بدرجة حرية الحركة. [1] وقد ابتكر دين كامين إنسانا آليا له 21 درجة حرية لجهاز يسمى داربا DARPA، ويمكن للإنسان الآلي عادة التحرك في 30 درجات حرية أو أكثر، منها 6 درجات حرية لكل ذراع، بالإضافة إلى 5 أو 6 لكل من أرجله، علاوة على درجات حرية حركه وسطه ورقبته.[2]
المراجع
- Paul, Richard P., Robot Manipulators: Mathematics, Programming, and Control, MIT Press, 1981.
- Craig, John J., Introduction to Robotics: Mechanics and Control, Addison-Wesley, 1986.
انظر أيضا
 بوابة هندسة
بوابة هندسة بوابة روبوتيات
بوابة روبوتيات بوابة ألعاب فيديو
بوابة ألعاب فيديو