ماسح ثلاثي الأبعاد
الماسح ثلاثي الأبعاد (بالإنجليزية: 3D Scanner) أداه تقوم بتحليل الموجودات (أو النماذج) بجمع بيانات عن شكلها وأحياناً مظهرها الخارجي (مثل لونها).[1][2][3] وتستخدم هذه البيانات لإنشاء مجسمات رقمية ثلاثية الأبعاد تستخدم في العديد من التطبيقات. المسح ثلاثي الأبعاد طريقة حديثة تستخدم ضوء الليزر لمسح الجسم بشكل مباشر دون تماس معه، وينتج عن ذلك غمامة نقطية ثلاثية الأبعاد للجسم الممسوح، بمعالجة هذه الغمامة النقطية ينتج نموذج ثلاثي الأبعاد للجسم.
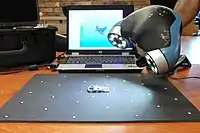
ماسح ثلاثي الأبعاد
|
هناك ثلاث أنواع للماسح ثلاثي الأبعاد: الماسح الليزري الأرضي الثابت Fix Terrestrial Laser Scanning، الماسح الليزري الأرضي المحمول على عربة Kinematic Terrestrial Laser Scanning, و الماسح الليزري الجوي Airborne Laser Scanning.
للماسح الليزري ثلاثي الأبعاد تطبيقات في مجالات شتى منها: الآثار, الهندسة المدنية, الطرق.
ميزات المسح الليزري ثلاثي الأبعاد: 1- دقة في البيانات. 2- كمية كبيرة من البيانات للمنطقة الممسوحة. 3- سرعة في التقاط البيانات. 4- الحصول على بيانات الجسم الممسوح دون تماس معه، وهذه خاصية مهمة في حال صعوبة الوصول للجسم.
خطوات العمل لإنشاء نموذج ثلاثي الأبعاد باستخدام الماسح الليزري الأرضي الثابت::
أولاً:
إنشاء شبكة إحداثيات حول المبنى أو الجسم المراد مسحه، وذلك باستخدام التيودوليت,أو جهاز محطة الرصد المتكاملة, وبذلك نحصل على الإحداثيات الثلاثية لمحطات التمركز والتي ستفيدنا لاحقاً لحساب إحداثيات الأهداف (Targets). كما يجب التنويه أنه في حال عدم وجود شبكة إحداثيات معلومة، يمكن أن يتم تركيز جهاز الماسح ثلاثي الأبعاد على محطات حرة، وهذه الطريقة هي المستخدمة في حال رصد تمثال أو عمود أثري يُراد إنشاء نموذج ثلاثي الأبعاد له.
ثانياً:
نختار نوعية الأهداف (Targets) المناسبة لعملية الرصد، حيث أنه لكل طبيعة عمل أهداف خاصة، فمثلاً لرصد مبنى قد يكتفى بالأهداف المسماة (White Black Targets), وفي حالة مسح تمثال فمن الأفضل استخدام الأهداف الكروية (Spherical Targets). نقوم بالرصد على الأهداف التي نكون قد لصقناها على جدران المبنى أو وزعناها حول الجسم المراد مسحه، وذلك لحساب إحداثياتها استناداً إلى إحداثيات نقاط الشبكة التي قمنا برصدها.
ثالثاً:
نقوم بمسح الجسم بواسطة الماسح ثلاثي الأبعاد، مع توخي الدقة في التمركز، وأيضاً تحديد الهدف بشكل جيد. كما ينبغي على الراصد أن يختار نقاط تمركزه حول الجسم الممسوح بحيث تؤمن عملية المسح مناطق متداخلة مع بعضها البعض وتغطي كافة الجسم، وذلك كله بهدف الوصول إلى إنشاء نموذج كامل وزيادة الدقة، وتفادي وجود مناطق غير مغطاة بشكل جيد خلال عملية المسح، الأمر الذي يصعب عملية النمذجة لاحقاً. قبل القيام بعملية المسح ولتجهيز الجهاز لعملية المسح نقوم بتشغيل الحاسوب المحمول المرفق مع الماسح ثلاثي الأبعاد وتوصيل كابل الإنترنت بالحاسوب المحمول، ومن ثم من قائمة ابدأ نشغل البرنامج. نقوم بإضافة اسم الماسح مثلاً (HDS6000)و باقي الإعدادات المطلوبة حسب نوعية الجهاز المستخدم. بعد ذلك نقوم بإنشاء قاعدة بيانات جديدة ونعطيها اسماً. بعد فتح المجلد وقبل البدء بعملية المسح نقوم بتحديد مجال الرؤية (Field of view). ونقوم بعمل مسح شامل وعام للجسم المراد مسحه. قبل البدء بعملية المسح الدقيق ومسح كل جزء من الجسم على حده نحدد دقة عمل الماسح ثلاثي الأبعاد إن كنا نريدها متوسطة أو عالية... الخ، وكذلك نحدد كثافة المسح، وسرعته. لاحقاً نحدد المنطقة المراد مسحها من الجسم وننقر (Scan). و للتسديد على الأهداف ننشأ نافذة حول الهدف ومن ثم ننقر (acquire).
رابعاً:
نحفظ المشروع في ملف خاص ومن ثم نقوم بتحميله على الحاسوب في المخبر.
خامساً:
في المختبر تبدأ عملية النمذجة, وهي ليست بالأمر السهل، لكننا نوجز هنا أكثر النقاط استخداماً، وهي حالات عامة تصادف كل العاملين في هذا المجال.
أولى الخطوات وأهمها هي نسب جميع محطات الرصد إلى جملة مركزية واحدة وتسمى هذه العملية ب(Registration). بعد إنجاز عملية ال (Registration) تأتي الخطوة التالية، وهي إزالة الأجسام الغير مرغوبة, والتي لا يمكن تفادي رصدها خلال عملية المسح، كالأشجار مثلاً, والأبنية المجاورة، أو السيارات وغيرها من الأشياء التي لا تهم خلال عملية النمذجة.
بعدها نقوم بعملية ال(Segmentation) وهي عملية تجزئة الغمامة النقطية إلى كيانات متعددة وفقاً للاعتبارات التالية: آ)أبعادها: فمثلاً في حالة مبني تتميز النوافذ والأبواب والجدران والسقف كل على حده بأبعاده. ب)الموضع: حيث من الواضح في حال مبنى أن الأرضية تقع أسفل البناء، والسقف فوق الجدران، وهكذا. ج)الطوبولوجيا: حيث أن السقف يتقاطع مع الجدران، والجدران تتقاطع مع الأرض.
نمذجة الشكل الهندسي:
نقوم باختيار الأدوات الأكثر ملائمة لكل شكل جزء من الغمامة النقطية, فلتمثيل عمود أو جائز(beam) مثلاً, نختار الصندوق Box, ولتمثيل الأرضية نختار الرقعة (Patch).
و في حال أن جزء من الغمامة النقطية كانت قليلة الكثافة، نعتمد في نمذجتها على تصورنا العام للشكل الممسوح.
مراجع
- Landmark detection by a rotary laser scanner for autonomous robot navigation in sewer pipes, Matthias Dorn et al., Proceedings of the ICMIT 2003, the second International Conference on Mechatronics and Information Technology, pp. 600- 604, Jecheon, Korea, Dec. 2003 نسخة محفوظة 29 أغسطس 2017 على موقع واي باك مشين.
- "3D scanning technologies." (باللغة الإنجليزية)، مؤرشف من الأصل في 05 أكتوبر 2018، اطلع عليه بتاريخ 15 سبتمبر 2016.
- David Luebke؛ Christopher Lutz؛ Rui Wang؛ Cliff Woolley (2002)، "Scanning Monticello"، مؤرشف من الأصل في 08 يوليو 2006.
 بوابة صور رقمية
بوابة صور رقمية بوابة تصميم
بوابة تصميم