Barkhausen stability criterion
In electronics, the Barkhausen stability criterion is a mathematical condition to determine when a linear electronic circuit will oscillate.[1][2][3] It was put forth in 1921 by German physicist Heinrich Georg Barkhausen (1881–1956).[4] It is widely used in the design of electronic oscillators, and also in the design of general negative feedback circuits such as op amps, to prevent them from oscillating.

Limitations
Barkhausen's criterion applies to linear circuits with a feedback loop. It cannot be applied directly to active elements with negative resistance like tunnel diode oscillators.
The kernel of the criterion is that a complex pole pair must be placed on the imaginary axis of the complex frequency plane if steady state oscillations should take place. In the real world, it is impossible to balance on the imaginary axis, so in practice a steady-state oscillator is a non-linear circuit:
- It needs to have positive feedback.
- The loop gain is at unity ().

Criterion
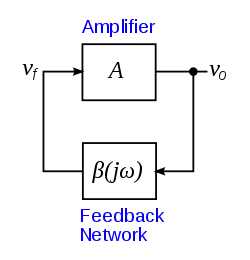
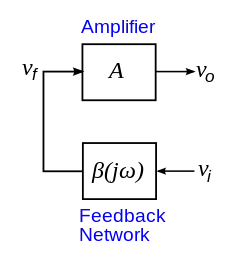
It states that if A is the gain of the amplifying element in the circuit and β(jω) is the transfer function of the feedback path, so βA is the loop gain around the feedback loop of the circuit, the circuit will sustain steady-state oscillations only at frequencies for which:
- The loop gain is equal to unity in absolute magnitude, that is, and
- The phase shift around the loop is zero or an integer multiple of 2π:

Barkhausen's criterion is a necessary condition for oscillation but not a sufficient condition: some circuits satisfy the criterion but do not oscillate.[5] Similarly, the Nyquist stability criterion also indicates instability but is silent about oscillation. Apparently there is not a compact formulation of an oscillation criterion that is both necessary and sufficient.[6]
Erroneous version
Barkhausen's original "formula for self-excitation", intended for determining the oscillation frequencies of the feedback loop, involved an equality sign: |βA| = 1. At the time conditionally-stable nonlinear systems were poorly understood; it was widely believed that this gave the boundary between stability (|βA| < 1) and instability (|βA| ≥ 1), and this erroneous version found its way into the literature.[7] However, sustained oscillations only occur at frequencies for which equality holds.
See also
References
- Basu, Dipak (2000). Dictionary of Pure and Applied Physics. CRC Press. pp. 34–35. ISBN 1420050222.
- Rhea, Randall W. (2010). Discrete Oscillator Design: Linear, Nonlinear, Transient, and Noise Domains. Artech House. p. 3. ISBN 978-1608070480.
- Carter, Bruce; Ron Mancini (2009). Op Amps for Everyone, 3rd Ed. Newnes. pp. 342–343. ISBN 978-0080949482.
- Barkhausen, H. (1935). Lehrbuch der Elektronen-Röhren und ihrer technischen Anwendungen [Textbook of Electron Tubes and their Technical Applications] (in German). Vol. 3. Leipzig: S. Hirzel. ASIN B0019TQ4AQ. OCLC 682467377.
- Lindberg, Erik (26–28 May 2010). "The Barkhausen Criterion (Observation ?)" (PDF). Proceedings of 18th IEEE Workshop on Nonlinear Dynamics of Electronic Systems (NDES2010), Dresden, Germany. Inst. of Electrical and Electronic Engineers. pp. 15–18. Archived from the original (PDF) on 4 March 2016. Retrieved 2 February 2013. discusses reasons for this. (Warning: large 56MB download)
- von Wangenheim, Lutz (2010), "On the Barkhausen and Nyquist stability criteria", Analog Integrated Circuits and Signal Processing, Springer Science+Business Media, LLC, 66 (1): 139–141, doi:10.1007/s10470-010-9506-4, ISSN 1573-1979, S2CID 111132040. Received: 17 June 2010 / Revised: 2 July 2010 / Accepted: 5 July 2010.
- Lundberg, Kent (14 November 2002). "Barkhausen Stability Criterion". Kent Lundberg. MIT. Archived from the original on 7 October 2008. Retrieved 16 November 2008.