Conditional probability distribution
In probability theory and statistics, given two jointly distributed random variables and , the conditional probability distribution of given is the probability distribution of when is known to be a particular value; in some cases the conditional probabilities may be expressed as functions containing the unspecified value of as a parameter. When both and are categorical variables, a conditional probability table is typically used to represent the conditional probability. The conditional distribution contrasts with the marginal distribution of a random variable, which is its distribution without reference to the value of the other variable.



If the conditional distribution of given is a continuous distribution, then its probability density function is known as the conditional density function.[1] The properties of a conditional distribution, such as the moments, are often referred to by corresponding names such as the conditional mean and conditional variance.
More generally, one can refer to the conditional distribution of a subset of a set of more than two variables; this conditional distribution is contingent on the values of all the remaining variables, and if more than one variable is included in the subset then this conditional distribution is the conditional joint distribution of the included variables.
Conditional discrete distributions
For discrete random variables, the conditional probability mass function of given can be written according to its definition as:


Due to the occurrence of in the denominator, this is defined only for non-zero (hence strictly positive)


The relation with the probability distribution of given is:

Example
Consider the roll of a fair die and let if the number is even (i.e., 2, 4, or 6) and otherwise. Furthermore, let if the number is prime (i.e., 2, 3, or 5) and otherwise.




| D | 1 | 2 | 3 | 4 | 5 | 6 |
|---|---|---|---|---|---|---|
| X | 0 | 1 | 0 | 1 | 0 | 1 |
| Y | 0 | 1 | 1 | 0 | 1 | 0 |
Then the unconditional probability that is 3/6 = 1/2 (since there are six possible rolls of the dice, of which three are even), whereas the probability that conditional on is 1/3 (since there are three possible prime number rolls—2, 3, and 5—of which one is even).
Conditional continuous distributions
Similarly for continuous random variables, the conditional probability density function of given the occurrence of the value of can be written as[2]: p. 99

where gives the joint density of and , while gives the marginal density for . Also in this case it is necessary that .



The relation with the probability distribution of given is given by:

The concept of the conditional distribution of a continuous random variable is not as intuitive as it might seem: Borel's paradox shows that conditional probability density functions need not be invariant under coordinate transformations.
Example
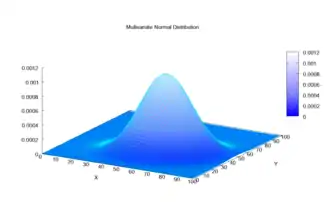
The graph shows a bivariate normal joint density for random variables and . To see the distribution of conditional on , one can first visualize the line in the plane, and then visualize the plane containing that line and perpendicular to the plane. The intersection of that plane with the joint normal density, once rescaled to give unit area under the intersection, is the relevant conditional density of .



Relation to independence
Random variables , are independent if and only if the conditional distribution of given is, for all possible realizations of , equal to the unconditional distribution of . For discrete random variables this means for all possible and with . For continuous random variables and , having a joint density function, it means for all possible and with .




Properties
Seen as a function of for given , is a probability mass function and so the sum over all (or integral if it is a conditional probability density) is 1. Seen as a function of for given , it is a likelihood function, so that the sum over all need not be 1.

Additionally, a marginal of a joint distribution can be expressed as the expectation of the corresponding conditional distribution. For instance, .
![{\displaystyle p_{X}(x)=E_{Y}[p_{X|Y}(X\ |\ Y)]}](../I/c619e0389a19da49ab8126efe376b1c5794d8f79.svg)
Measure-theoretic formulation
Let be a probability space, a -field in . Given , the Radon-Nikodym theorem implies that there is[3] a -measurable random variable , called the conditional probability, such that








for every , and such a random variable is uniquely defined up to sets of probability zero. A conditional probability is called regular if is a probability measure on for all a.e.




Special cases:
- For the trivial sigma algebra , the conditional probability is the constant function
- If , then , the indicator function (defined below).




Let be a -valued random variable. For each , define




For any , the function is called the conditional probability distribution of given . If it is a probability measure on , then it is called regular.

For a real-valued random variable (with respect to the Borel -field on ), every conditional probability distribution is regular.[4] In this case, almost surely.


![{\displaystyle E[X\mid {\mathcal {G}}]=\int _{-\infty }^{\infty }x\,\mu (dx,\cdot )}](../I/e3b7a6e78f4a42911759c524c8c63236d50294f6.svg)
Relation to conditional expectation
For any event , define the indicator function:

which is a random variable. Note that the expectation of this random variable is equal to the probability of A itself:

Given a -field , the conditional probability is a version of the conditional expectation of the indicator function for :



An expectation of a random variable with respect to a regular conditional probability is equal to its conditional expectation.
See also
References
Citations
- Ross, Sheldon M. (1993). Introduction to Probability Models (Fifth ed.). San Diego: Academic Press. pp. 88–91. ISBN 0-12-598455-3.
- Park,Kun Il (2018). Fundamentals of Probability and Stochastic Processes with Applications to Communications. Springer. ISBN 978-3-319-68074-3.
- Billingsley (1995), p. 430
- Billingsley (1995), p. 439
Sources
- Billingsley, Patrick (1995). Probability and Measure (3rd ed.). New York, NY: John Wiley and Sons.