Lorenz 96 model
The Lorenz 96 model is a dynamical system formulated by Edward Lorenz in 1996.[1] It is defined as follows. For :


where it is assumed that and and . Here is the state of the system and is a forcing constant. is a common value known to cause chaotic behavior.






It is commonly used as a model problem in data assimilation.[2]
Python simulation
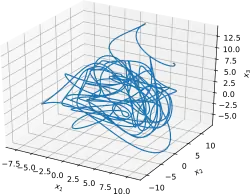
Plot of the first three variables of the simulation
from scipy.integrate import odeint
import matplotlib.pyplot as plt
import numpy as np
# These are our constants
N = 5 # Number of variables
F = 8 # Forcing
def L96(x, t):
"""Lorenz 96 model with constant forcing"""
# Setting up vector
d = np.zeros(N)
# Loops over indices (with operations and Python underflow indexing handling edge cases)
for i in range(N):
d[i] = (x[(i + 1) % N] - x[i - 2]) * x[i - 1] - x[i] + F
return d
x0 = F * np.ones(N) # Initial state (equilibrium)
x0[0] += 0.01 # Add small perturbation to the first variable
t = np.arange(0.0, 30.0, 0.01)
x = odeint(L96, x0, t)
# Plot the first three variables
fig = plt.figure()
ax = fig.add_subplot(projection="3d")
ax.plot(x[:, 0], x[:, 1], x[:, 2])
ax.set_xlabel("$x_1$")
ax.set_ylabel("$x_2$")
ax.set_zlabel("$x_3$")
plt.show()
Julia simulation
using DynamicalSystems, PyPlot
PyPlot.using3D()
# parameters and initial conditions
N = 5
F = 8.0
u₀ = F * ones(N)
u₀[1] += 0.01 # small perturbation
# The Lorenz-96 model is predefined in DynamicalSystems.jl:
ds = Systems.lorenz96(N; F = F)
# Equivalently, to define a fast version explicitly, do:
struct Lorenz96{N} end # Structure for size type
function (obj::Lorenz96{N})(dx, x, p, t) where {N}
F = p[1]
# 3 edge cases explicitly (performance)
@inbounds dx[1] = (x[2] - x[N - 1]) * x[N] - x[1] + F
@inbounds dx[2] = (x[3] - x[N]) * x[1] - x[2] + F
@inbounds dx[N] = (x[1] - x[N - 2]) * x[N - 1] - x[N] + F
# then the general case
for n in 3:(N - 1)
@inbounds dx[n] = (x[n + 1] - x[n - 2]) * x[n - 1] - x[n] + F
end
return nothing
end
lor96 = Lorenz96{N}() # create struct
ds = ContinuousDynamicalSystem(lor96, u₀, [F])
# And now evolve a trajectory
dt = 0.01 # sampling time
Tf = 30.0 # final time
tr = trajectory(ds, Tf; dt = dt)
# And plot in 3D:
x, y, z = columns(tr)
plot3D(x, y, z)
References
- Lorenz, Edward (1996). "Predictability – A problem partly solved" (PDF). Seminar on Predictability, Vol. I, ECMWF.
- Ott, Edward; et al. (2002). "A Local Ensemble Kalman Filter for Atmospheric Data Assimilation". arXiv:physics/0203058.
This article is issued from Wikipedia. The text is licensed under Creative Commons - Attribution - Sharealike. Additional terms may apply for the media files.