Microbotics
Microbotics (or microrobotics) is the field of miniature robotics, in particular mobile robots with characteristic dimensions less than 1 mm. The term can also be used for robots capable of handling micrometer size components.

History
Microbots were born thanks to the appearance of the microcontroller in the last decade of the 20th century, and the appearance of microelectromechanical systems (MEMS) on silicon, although many microbots do not use silicon for mechanical components other than sensors. The earliest research and conceptual design of such small robots was conducted in the early 1970s in (then) classified research for U.S. intelligence agencies. Applications envisioned at that time included prisoner of war rescue assistance and electronic intercept missions. The underlying miniaturization support technologies were not fully developed at that time, so that progress in prototype development was not immediately forthcoming from this early set of calculations and concept design.[1] As of 2008, the smallest microrobots use a scratch drive actuator.[2]
The development of wireless connections, especially Wi-Fi (i.e. in household networks) has greatly increased the communication capacity of microbots, and consequently their ability to coordinate with other microbots to carry out more complex tasks. Indeed, much recent research has focused on microbot communication, including a 1,024 robot swarm at Harvard University that assembles itself into various shapes;[3] and manufacturing microbots at SRI International for DARPA's "MicroFactory for Macro Products" program that can build lightweight, high-strength structures.[4][5]
Microbots called xenobots have also been built using biological tissues instead of metal and electronics.[6] Xenobots avoid some of the technological and environmental complications of traditional microbots as they are self-powered, biodegradable, and biocompatible.
Definitions
While the "micro" prefix has been used subjectively to mean "small", standardizing on length scales avoids confusion. Thus a nanorobot would have characteristic dimensions at or below 1 micrometer, or manipulate components on the 1 to 1000 nm size range. A microrobot would have characteristic dimensions less than 1 millimeter, a millirobot would have dimensions less than a cm, a mini-robot would have dimensions less than 10 cm (4 in), and a small robot would have dimensions less than 100 cm (39 in).
Many sources also describe robots larger than 1 millimeter as microbots or robots larger than 1 micrometer as nanobots.
Design considerations
The way microrobots move around is a function of their purpose and necessary size. At submicron sizes, the physical world demands rather bizarre ways of getting around. The Reynolds number for airborne robots is less than unity; the viscous forces dominate the inertial forces, so “flying” could use the viscosity of air, rather than Bernoulli's principle of lift. Robots moving through fluids may require rotating flagella like the motile form of E. coli. Hopping is stealthy and energy-efficient; it allows the robot to negotiate the surfaces of a variety of terrains.[7] Pioneering calculations (Solem 1994) examined possible behaviors based on physical realities.[8]
One of the major challenges in developing a microrobot is to achieve motion using a very limited power supply. The microrobots can use a small lightweight battery source like a coin cell or can scavenge power from the surrounding environment in the form of vibration or light energy.[9] Microrobots are also now using biological motors as power sources, such as flagellated Serratia marcescens, to draw chemical power from the surrounding fluid to actuate the robotic device. These biorobots can be directly controlled by stimuli such as chemotaxis or galvanotaxis with several control schemes available. A popular alternative to an onboard battery is to power the robots using externally induced power. Examples include the use of electromagnetic fields,[10] ultrasound and light to activate and control micro robots.[11]
The 2022 study focused on a photo-biocatalytic approach for the "design of light-driven microrobots with applications in microbiology and biomedicine".[12][13]
Types and applications
Due to their small size, microbots are potentially very cheap, and could be used in large numbers (swarm robotics) to explore environments which are too small or too dangerous for people or larger robots. It is expected that microbots will be useful in applications such as looking for survivors in collapsed buildings after an earthquake or crawling through the digestive tract. What microbots lack in brawn or computational power, they can make up for by using large numbers, as in swarms of microbots.
Potential applications with demonstrated prototypes include:
Medical microbots
.png.webp)
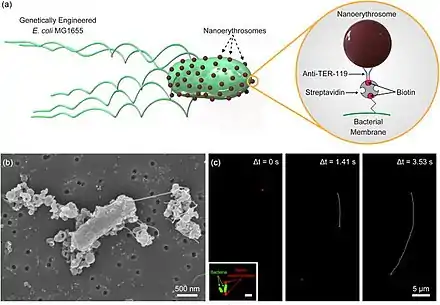
Biohybrid microswimmers, mainly composed of integrated biological actuators and synthetic cargo carriers, have recently shown promise toward minimally invasive theranostic applications.[17][18][19][20] Various microorganisms, including bacteria,[21][22] microalgae,[23][24] and spermatozoids,[25][26] have been utilised to fabricate different biohybrid microswimmers with advanced medical functionalities, such as autonomous control with environmental stimuli for targeting, navigation through narrow gaps, and accumulation to necrotic regions of tumor environments.[27] Steerability of the synthetic cargo carriers with long-range applied external fields, such as acoustic or magnetic fields,[28][29] and intrinsic taxis behaviours of the biological actuators toward various environmental stimuli, such as chemoattractants,[30] pH, and oxygen,[31][32] make biohybrid microswimmers a promising candidate for a broad range of medical active cargo delivery applications.[27][14]
For example, there are biocompatible microalgae-based microrobots for active drug-delivery in the lungs and the gastrointestinal tract,[33][34][35] and magnetically guided engineered bacterial microbots for 'precision targeting'[36] for fighting cancer[37][38] that all have been tested with mice.
See also
References
- Solem, J. C. (1996). "The application of microrobotics in warfare". Los Alamos National Laboratory Technical Report LAUR-96-3067. doi:10.2172/369704.
- "Microrobotic Ballet". Duke University. June 2, 2008. Archived from the original on 2011-04-03. Retrieved 2014-08-24.
- Hauert, Sabine (2014-08-14). "Thousand-robot swarm assembles itself into shapes". Ars Technica. Retrieved 2014-08-24.
- Misra, Ria (2014-04-22). "This Swarm Of Insect-Inspired Microbots Is Unsettlingly Clever". io9. Retrieved 2014-08-24.
- Temple, James (2014-04-16). "SRI Unveils Tiny Robots Ready to Build Big Things". re/code. Retrieved 2014-08-24.
- Kriegman, Sam; Blackiston, Douglas; Levin, Michael; Bongard, Josh (2020). "A scalable pipeline for designing reconfigurable organisms". Proceedings of the National Academy of Sciences. 117 (4): 1853–1859. Bibcode:2020PNAS..117.1853K. doi:10.1073/pnas.1910837117. PMC 6994979. PMID 31932426.
- Solem, J. C. (1994). "The motility of microrobots". In Langton, C. (ed.). Artificial Life III: Proceedings of the Workshop on Artificial Life, June 1992, Santa Fe, NM. Proceedings, Santa Fe Institute studies in the sciences of complexity. Vol. 17. Santa Fe Institute Studies in the Sciences of Complexity (Addison-Wesley, Reading, MA). pp. 359–380.
- Kristensen, Lars Kroll (2000). "Aintz: A study of emergent properties in a model of ant foraging". In Bedau, M. A.; et al. (eds.). Artificial Life VII: Proceedings of the Seventh International Conference on Artificial Life. MIT Press. p. 359. ISBN 9780262522908.
- Meinhold, Bridgette (31 August 2009). "Swarms of Solar Microbots May Revolutionize Data Gathering". Inhabitat.
- Ecole Polytechnique Federale de Lausanne (January 18, 2019). "Researchers develop smart micro-robots that can adapt to their surroundings". Phys.org.
- Chang, Suk Tai; Paunov, Vesselin N.; Petsev, Dimiter N.; Velev, Orlin D. (March 2007). "Remotely powered self-propelling particles and micropumps based on miniature diodes". Nature Materials. 6 (3): 235–240. Bibcode:2007NatMa...6..235C. doi:10.1038/nmat1843. ISSN 1476-1122. PMID 17293850. S2CID 20558069.
- Villa, Katherine; Sopha, Hanna; Zelenka, Jaroslav; Motola, Martin; Dekanovsky, Lukas; Beketova, Darya Chylii; Macak, Jan M.; Ruml, Tomáš; Pumera, Martin (2022-02-05). "Enzyme‐Photocatalyst Tandem Microrobot Powered by Urea for Escherichia coli Biofilm Eradication". Small. 18 (36): 2106612. doi:10.1002/smll.202106612. ISSN 1613-6810. PMID 35122470.
- Chemistry, University of; Prague, Technology. "New research into a microrobot powered by urea for E. coli biofilm eradication". phys.org. Retrieved 2022-07-22.
- Buss, Nicole; Yasa, Oncay; Alapan, Yunus; Akolpoglu, Mukrime Birgul; Sitti, Metin (2020). "Nanoerythrosome-functionalized biohybrid microswimmers". APL Bioengineering. 4 (2): 026103. doi:10.1063/1.5130670. PMC 7141839. PMID 32548539.
 Material was copied from this source, which is available under a Creative Commons Attribution 4.0 International License.
Material was copied from this source, which is available under a Creative Commons Attribution 4.0 International License. - Delasoie, Joachim; Schiel, Philippe; Vojnovic, Sandra; Nikodinovic-Runic, Jasmina; Zobi, Fabio (25 May 2020). "Photoactivatable Surface-Functionalized Diatom Microalgae for Colorectal Cancer Targeted Delivery and Enhanced Cytotoxicity of Anticancer Complexes". Pharmaceutics. MDPI AG. 12 (5): 480. doi:10.3390/pharmaceutics12050480. ISSN 1999-4923. PMC 7285135. PMID 32466116. Material was copied from this source, which is available under a Creative Commons Attribution 4.0 International License.
- Tramontano, Chiara; Chianese, Giovanna; Terracciano, Monica; de Stefano, Luca; Rea, Ilaria (2020-09-28). "Nanostructured Biosilica of Diatoms: From Water World to Biomedical Applications". Applied Sciences. MDPI AG. 10 (19): 6811. doi:10.3390/app10196811. ISSN 2076-3417. Material was copied from this source, which is available under a Creative Commons Attribution 4.0 International License.
- Hosseinidoust, Zeinab; Mostaghaci, Babak; Yasa, Oncay; Park, Byung-Wook; Singh, Ajay Vikram; Sitti, Metin (2016). "Bioengineered and biohybrid bacteria-based systems for drug delivery". Advanced Drug Delivery Reviews. 106 (Pt A): 27–44. doi:10.1016/j.addr.2016.09.007. PMID 27641944.
- Schwarz, Lukas; Medina-Sánchez, Mariana; Schmidt, Oliver G. (2017). "Hybrid Bio Micromotors". Applied Physics Reviews. 4 (3): 031301. Bibcode:2017ApPRv...4c1301S. doi:10.1063/1.4993441.
- Bastos-Arrieta, Julio; Revilla-Guarinos, Ainhoa; Uspal, William E.; Simmchen, Juliane (2018). "Bacterial Biohybrid Microswimmers". Frontiers in Robotics and AI. 5: 97. doi:10.3389/frobt.2018.00097. PMC 7805739. PMID 33500976.
- Erkoc, Pelin; Yasa, Immihan C.; Ceylan, Hakan; Yasa, Oncay; Alapan, Yunus; Sitti, Metin (2019). "Mobile Microrobots for Active Therapeutic Delivery". Advanced Therapeutics. 2. doi:10.1002/adtp.201800064. S2CID 88204894.
- Park, Byung-Wook; Zhuang, Jiang; Yasa, Oncay; Sitti, Metin (2017). "Multifunctional Bacteria-Driven Microswimmers for Targeted Active Drug Delivery". ACS Nano. 11 (9): 8910–8923. doi:10.1021/acsnano.7b03207. PMID 28873304.
- Singh, Ajay Vikram; Hosseinidoust, Zeinab; Park, Byung-Wook; Yasa, Oncay; Sitti, Metin (2017). "Microemulsion-Based Soft Bacteria-Driven Microswimmers for Active Cargo Delivery". ACS Nano. 11 (10): 9759–9769. doi:10.1021/acsnano.7b02082. PMID 28858477.
- Weibel, D. B.; Garstecki, P.; Ryan, D.; Diluzio, W. R.; Mayer, M.; Seto, J. E.; Whitesides, G. M. (2005). "Microoxen: Microorganisms to move microscale loads". Proceedings of the National Academy of Sciences. 102 (34): 11963–11967. Bibcode:2005PNAS..10211963W. doi:10.1073/pnas.0505481102. PMC 1189341. PMID 16103369.
- Yasa, Oncay; Erkoc, Pelin; Alapan, Yunus; Sitti, Metin (2018). "Microalga-Powered Microswimmers toward Active Cargo Delivery". Advanced Materials. 30 (45): e1804130. Bibcode:2018AdM....3004130Y. doi:10.1002/adma.201804130. PMID 30252963. S2CID 52823884.
- Xu, Haifeng; Medina-Sánchez, Mariana; Magdanz, Veronika; Schwarz, Lukas; Hebenstreit, Franziska; Schmidt, Oliver G. (2018). "Sperm-Hybrid Micromotor for Targeted Drug Delivery". ACS Nano. 12 (1): 327–337. doi:10.1021/acsnano.7b06398. PMID 29202221.
- Chen, Chuanrui; Chang, Xiaocong; Angsantikul, Pavimol; Li, Jinxing; Esteban-Fernández De Ávila, Berta; Karshalev, Emil; Liu, Wenjuan; Mou, Fangzhi; He, Sha; Castillo, Roxanne; Liang, Yuyan; Guan, Jianguo; Zhang, Liangfang; Wang, Joseph (2018). "Chemotactic Guidance of Synthetic Organic/Inorganic Payloads Functionalized Sperm Micromotors". Advanced Biosystems. 2. doi:10.1002/adbi.201700160. S2CID 103392074.
- Alapan, Yunus; Yasa, Oncay; Yigit, Berk; Yasa, I. Ceren; Erkoc, Pelin; Sitti, Metin (2019). "Microrobotics and Microorganisms: Biohybrid Autonomous Cellular Robots". Annual Review of Control, Robotics, and Autonomous Systems. 2: 205–230. doi:10.1146/annurev-control-053018-023803. S2CID 139819519.
- Wu, Zhiguang; Li, Tianlong; Li, Jinxing; Gao, Wei; Xu, Tailin; Christianson, Caleb; Gao, Weiwei; Galarnyk, Michael; He, Qiang; Zhang, Liangfang; Wang, Joseph (2014). "Turning Erythrocytes into Functional Micromotors". ACS Nano. 8 (12): 12041–12048. doi:10.1021/nn506200x. PMC 4386663. PMID 25415461.
- Alapan, Yunus; Yasa, Oncay; Schauer, Oliver; Giltinan, Joshua; Tabak, Ahmet F.; Sourjik, Victor; Sitti, Metin (2018). "Soft erythrocyte-based bacterial microswimmers for cargo delivery". Science Robotics. 3 (17). doi:10.1126/scirobotics.aar4423. PMID 33141741. S2CID 14003685.
- Zhuang, Jiang; Sitti, Metin (2016). "Chemotaxis of bio-hybrid multiple bacteria-driven microswimmers". Scientific Reports. 6: 32135. Bibcode:2016NatSR...632135Z. doi:10.1038/srep32135. PMC 4995368. PMID 27555465.
- Zhuang, Jiang; Wright Carlsen, Rika; Sitti, Metin (2015). "PH-Taxis of Biohybrid Microsystems". Scientific Reports. 5: 11403. Bibcode:2015NatSR...511403Z. doi:10.1038/srep11403. PMC 4466791. PMID 26073316.
- Felfoul, Ouajdi; Mohammadi, Mahmood; Taherkhani, Samira; De Lanauze, Dominic; Zhong Xu, Yong; Loghin, Dumitru; Essa, Sherief; Jancik, Sylwia; Houle, Daniel; Lafleur, Michel; Gaboury, Louis; Tabrizian, Maryam; Kaou, Neila; Atkin, Michael; Vuong, Té; Batist, Gerald; Beauchemin, Nicole; Radzioch, Danuta; Martel, Sylvain (2016). "Magneto-aerotactic bacteria deliver drug-containing nanoliposomes to tumour hypoxic regions". Nature Nanotechnology. 11 (11): 941–947. Bibcode:2016NatNa..11..941F. doi:10.1038/nnano.2016.137. PMC 6094936. PMID 27525475.
- "Algae micromotors join the ranks for targeted drug delivery". Chemical & Engineering News. Retrieved 19 October 2022.
- Zhang, Fangyu; Zhuang, Jia; Li, Zhengxing; Gong, Hua; de Ávila, Berta Esteban-Fernández; Duan, Yaou; Zhang, Qiangzhe; Zhou, Jiarong; Yin, Lu; Karshalev, Emil; Gao, Weiwei; Nizet, Victor; Fang, Ronnie H.; Zhang, Liangfang; Wang, Joseph (22 September 2022). "Nanoparticle-modified microrobots for in vivo antibiotic delivery to treat acute bacterial pneumonia". Nature Materials. 21 (11): 1324–1332. Bibcode:2022NatMa..21.1324Z. doi:10.1038/s41563-022-01360-9. ISSN 1476-4660. PMC 9633541. PMID 36138145.
- Zhang, Fangyu; Li, Zhengxing; Duan, Yaou; Abbas, Amal; Mundaca-Uribe, Rodolfo; Yin, Lu; Luan, Hao; Gao, Weiwei; Fang, Ronnie H.; Zhang, Liangfang; Wang, Joseph (28 September 2022). "Gastrointestinal tract drug delivery using algae motors embedded in a degradable capsule". Science Robotics. 7 (70): eabo4160. doi:10.1126/scirobotics.abo4160. ISSN 2470-9476. PMC 9884493. PMID 36170380. S2CID 252598190.
- Schmidt, Christine K.; Medina-Sánchez, Mariana; Edmondson, Richard J.; Schmidt, Oliver G. (5 November 2020). "Engineering microrobots for targeted cancer therapies from a medical perspective". Nature Communications. 11 (1): 5618. Bibcode:2020NatCo..11.5618S. doi:10.1038/s41467-020-19322-7. ISSN 2041-1723. PMC 7645678. PMID 33154372.
- Thompson, Joanna. "These tiny magnetic robots can infiltrate tumors — and maybe destroy cancer". Inverse. Retrieved 21 November 2022.
- Gwisai, T.; Mirkhani, N.; Christiansen, M. G.; Nguyen, T. T.; Ling, V.; Schuerle, S. (26 October 2022). "Magnetic torque–driven living microrobots for increased tumor infiltration". Science Robotics. 7 (71): eabo0665. bioRxiv 10.1101/2022.01.03.473989. doi:10.1126/scirobotics.abo0665. ISSN 2470-9476. PMID 36288270. S2CID 253160428.
| Main articles |  | |
|---|---|---|
| Types | ||
| Classifications | ||
| Locomotion | ||
| Navigation and mapping | ||
| Research | ||
| Companies | ||
| Related | ||
| ||