Markov odometer
In mathematics, a Markov odometer is a certain type of topological dynamical system. It plays a fundamental role in ergodic theory and especially in orbit theory of dynamical systems, since a theorem of H. Dye asserts that every ergodic nonsingular transformation is orbit-equivalent to a Markov odometer.[1]
The basic example of such system is the "nonsingular odometer", which is an additive topological group defined on the product space of discrete spaces, induced by addition defined as , where . This group can be endowed with the structure of a dynamical system; the result is a conservative dynamical system.


The general form, which is called "Markov odometer", can be constructed through Bratteli–Vershik diagram to define Bratteli–Vershik compactum space together with a corresponding transformation.
Nonsingular odometers
Several kinds of non-singular odometers may be defined.[2] These are sometimes referred to as adding machines.[3] The simplest is illustrated with the Bernoulli process. This is the set of all infinite strings in two symbols, here denoted by endowed with the product topology. This definition extends naturally to a more general odometer defined on the product space


for some sequence of integers with each


The odometer for for all is termed the dyadic odometer, the von Neumann–Kakutani adding machine or the dyadic adding machine.


The topological entropy of every adding machine is zero.[3] Any continuous map of an interval with a topological entropy of zero is topologically conjugate to an adding machine, when restricted to its action on the topologically invariant transitive set, with periodic orbits removed.[3]
Dyadic odometer





The set of all infinite strings in strings in two symbols has a natural topology, the product topology, generated by the cylinder sets. The product topology extends to a Borel sigma-algebra; let denote that algebra. Individual points are denoted as



The Bernoulli process is conventionally endowed with a collection of measures, the Bernnoulli measures, given by and , for some independent of . The value of is rather special; it corresponds to the special case of the Haar measure, when is viewed as a compact Abelian group. Note that the Bernoulli measure is not the same as the 2-adic measure on the dyadic integers! Formally, one can observe that is also the base space for the dyadic integers; however, the dyadic integers are endowed with a metric, the p-adic metric, which induces a metric topology distinct from the product topology used here.





The space can be endowed with addition, defined as coordinate addition, with a carry bit. That is, for each coordinate, let where and



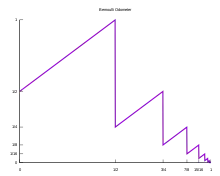
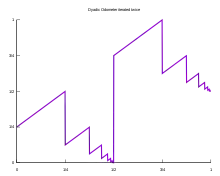
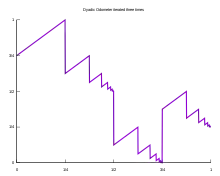
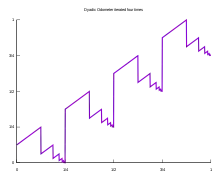
inductively. Increment-by-one is then called the (dyadic) odometer. It is the transformation given by , where . It is called the odometer due to how it looks when it "rolls over": is the transformation . Note that and that is -measurable, that is, for all






The transformation is non-singular for every . Recall that a measurable transformation is non-singular when, given , one has that if and only if . In this case, one finds






where . Hence is nonsingular with respect to .

The transformation is ergodic. This follows because, for every and natural number , the orbit of under is the set . This in turn implies that is conservative, since every invertible ergodic nonsingular transformation in a nonatomic space is conservative.



Note that for the special case of , that is a measure-preserving dynamical system.

Integer odometers
The same construction enables to define such a system for every product of discrete spaces. In general, one writes

for with an integer. The product topology extends naturally to the product Borel sigma-algebra on . A product measure on is conventionally defined as given some measure on . The corresponding map is defined by






where is the smallest index for which . This is again a topological group.


A special case of this is the Ornstein odometer, which is defined on the space

with the measure a product of

Sandpile model
A concept closely related to the conservative odometer is that of the abelian sandpile model. This model replaces the directed linear sequence of finite groups constructed above by an undirected graph of vertexes and edges. At each vertex one places a finite group with the degree of the vertex . Transition functions are defined by the graph Laplacian. That is, one can increment any given vertex by one; when incrementing the largest group element (so that it increments back down to zero), each of the neighboring vertexes are incremented by one.





Sandpile models differ from the above definition of a conservative odometer in three different ways. First, in general, there is no unique vertex singled out as the starting vertex, whereas in the above, the first vertex is the starting vertex; it is the one that is incremented by the transition function. Next, the sandpile models in general use undirected edges, so that the wrapping of the odometer redistributes in all directions. A third difference is that sandpile models are usually not taken on an infinite graph, and that rather, there is one special vertex singled out, the "sink", which absorbs all increments and never wraps. The sink is equivalent to cutting away the infinite parts of an infinite graph, and replacing them by the sink; alternately, as ignoring all changes past that termination point.
Markov odometer
Let be an ordered Bratteli–Vershik diagram, consists on a set of vertices of the form (disjoint union) where is a singleton and on a set of edges (disjoint union).




The diagram includes source surjection-mappings and range surjection-mappings . We assume that are comparable if and only if .




For such diagram we look at the product space equipped with the product topology. Define "Bratteli–Vershik compactum" to be the subspace of infinite paths,


Assume there exists only one infinite path for which each is maximal and similarly one infinite path . Define the "Bratteli-Vershik map" by and, for any define , where is the first index for which is not maximal and accordingly let be the unique path for which are all maximal and is the successor of . Then is homeomorphism of .













Let be a sequence of stochastic matrices such that if and only if . Define "Markov measure" on the cylinders of by . Then the system is called a "Markov odometer".




![{\displaystyle \mu _{P}([e_{1},\dots ,e_{n}])=p_{s_{1}(e_{1}),e_{1}}^{(1)}\cdots p_{s_{n}(e_{n}),e_{n}}^{(n)}}](../I/8f66102ba1b29e0542b6d1c9de33126ef2be1e99.svg)

One can show that the nonsingular odometer is a Markov odometer where all the are singletons.

See also
References
- Dooley, A.H.; Hamachi, T. (2003). "Nonsingular dynamical systems, Bratteli diagrams and Markov odometers". Israel Journal of Mathematics. 138: 93–123. doi:10.1007/BF02783421.
- Danilenko, Alexander I.; Silva, Cesar E. (2011). "Ergodic Theory: Nonsingular Transformations". In Meyers, Robert A. (ed.). Mathematics of Complexity and Dynamical Systems. Springer. arXiv:0803.2424. doi:10.1007/978-1-4614-1806-1_22.
- Nicol, Matthew; Petersen, Karl (2009). "Ergodic Theory: Basic Examples and Constructions" (PDF). Encyclopedia of Complexity and Systems Science. Springer. doi:10.1007/978-0-387-30440-3_177. ISBN 978-0-387-30440-3.
Further reading
- Aaronson, J. (1997). An Introduction to Infinite Ergodic Theory. Mathematical surveys and monographs. Vol. 50. American Mathematical Society. pp. 25–32. ISBN 9781470412814.
- Dooley, Anthony H. (2003). "Markov odometers". In Bezuglyi, Sergey; Kolyada, Sergiy (eds.). Topics in dynamics and ergodic theory. Survey papers and mini-courses presented at the international conference and US-Ukrainian workshop on dynamical systems and ergodic theory, Katsiveli, Ukraine, August 21–30, 2000. Lond. Math. Soc. Lect. Note Ser. Vol. 310. Cambridge: Cambridge University Press. pp. 60–80. ISBN 0-521-53365-1. Zbl 1063.37005.