Small-gain theorem
In nonlinear systems, the formalism of input-output stability is an important tool in studying the stability of interconnected systems since the gain of a system directly relates to how the norm of a signal increases or decreases as it passes through the system. The small-gain theorem gives a sufficient condition for finite-gain stability of the feedback connection. The small gain theorem was proved by George Zames in 1966. It can be seen as a generalization of the Nyquist criterion to non-linear time-varying MIMO systems (systems with multiple inputs and multiple outputs).

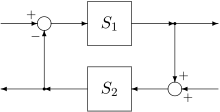
Theorem. Assume two stable systems and are connected in a feedback loop, then the closed loop system is input-output stable if and both and are stable by themselves. (This norm is typically the -norm, the size of the largest singular value of the transfer function over all frequencies. Any induced Norm will also lead to the same results).[1][2]




Notes
- Glad, Ljung: Control Theory, Page 19
- Glad, Ljung: Control Theory (Edition 2:6), Page 31
References
- H. K. Khalil, Nonlinear Systems, third edition, Prentice Hall, Upper Saddle River, New Jersey, 2002;
- C. A. Desoer, M. Vidyasagar, Feedback Systems: Input-Output Properties, second edition, SIAM, 2009.