Tide-predicting machine
A tide-predicting machine was a special-purpose mechanical analog computer of the late 19th and early 20th centuries, constructed and set up to predict the ebb and flow of sea tides and the irregular variations in their heights – which change in mixtures of rhythms, that never (in the aggregate) repeat themselves exactly.[1] Its purpose was to shorten the laborious and error-prone computations of tide-prediction. Such machines usually provided predictions valid from hour to hour and day to day for a year or more ahead.

The first tide-predicting machine, designed and built in 1872–73, and followed by two larger machines on similar principles in 1876 and 1879, was conceived by Sir William Thomson. Thomson had introduced the method of harmonic analysis of tidal patterns in the 1860s and the first machine was designed by Thomson with the collaboration of Edward Roberts (assistant at the UK HM Nautical Almanac Office), and of Alexander Légé, who constructed it.[2]
In the US, another tide-predicting machine on a different pattern was designed by William Ferrel and built in 1881–2.[3] Developments and improvements continued in the UK, US and Germany through the first half of the 20th century. The machines became widely used for constructing official tidal predictions for general marine navigation. They came to be regarded as of military strategic importance during World War I,[4] and again during the Second World War, when the US No.2 Tide Predicting Machine, described below, was classified, along with the data that it produced, and used to predict tides for the D-Day Normandy landings and all the island landings in the Pacific war.[5] Military interest in such machines continued even for some time afterwards.[6] They were made obsolete by digital electronic computers that can be programmed to carry out similar computations, but the tide-predicting machines continued in use until the 1960s and 1970s.[7]
Several examples of tide-predicting machines remain on display as museum-pieces, occasionally put into operation for demonstration purposes, monuments to the mathematical and mechanical ingenuity of their creators.
Background
Modern scientific study of tides dates back to Isaac Newton's Principia of 1687, in which he applied the theory of gravitation to make a first approximation of the effects of the Moon and Sun on the Earth's tidal waters. The approximation developed by Newton and his successors of the next 90 years is known as the 'equilibrium theory' of tides.[8]
Beginning in 1776, Pierre-Simon Laplace made a fundamental advance on the equilibrium approximation, with the first description of oceanic tidal waters' dynamic responses to the tide-generating forces due to the Moon and Sun.[8][9]
Laplace's improvements in theory were substantial, but they still left prediction in an approximate state. This position changed in the 1860s when the local circumstances of tidal phenomena were more fully brought into account by William Thomson's application of Fourier analysis to the tidal motions.[8] Thomson's work in this field was then further developed and extended by George Darwin, the second son of Charles Darwin: George Darwin's work was based on the lunar theory current in his time. His symbols for the tidal harmonic constituents are still used. Darwin's harmonic developments of the tide-generating forces were later brought by A. T. Doodson up to date and extended in light of the new and more accurate lunar theory of E. W. Brown that remained current through most of the twentieth century.
The state to which the science of tide-prediction had arrived by the 1870s can be summarized: Astronomical theories of the Moon and Sun had identified the frequencies and strengths of different components of the tide-generating force. But effective prediction at any given place called for measurement of an adequate sample of local tidal observations, to show the local tidal response at those different frequencies, in amplitude and phase. Those observations had then to be analyzed, to derive the coefficients and phase angles. Then, for purposes of prediction, those local tidal constants had to be recombined, each with a different component of the tide-generating forces to which it applied, and at each of a sequence of future dates and times, and then the different elements finally collected together to obtain their aggregate effects. In the age when calculations were done by hand and brain, with pencil and paper and tables, this was recognized as an immensely laborious and error-prone undertaking.
Thomson recognized that what was needed was a convenient and preferably automated way to evaluate repeatedly the sum of tidal terms such as:

containing 10, 20 or even more trigonometrical terms, so that the computation could conveniently be repeated in full for each of a very large number of different chosen values of the date/time . This was the core of the problem solved by the tide-predicting machines.

Principle
Thomson conceived his aim as to construct a mechanism that would evaluate this trigonometrical sum physically, e.g. as the vertical position of a pen that could then plot a curve on a moving band of paper.
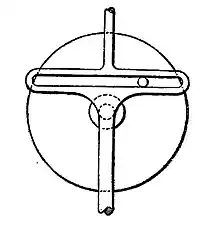
There were several mechanisms available to him for converting rotary motion into sinusoidal motion. One of them is shown in the schematic (right). A rotating drive-wheel is fitted with an off-center peg. A shaft with a horizontally-slotted section is free to move vertically up and down. The wheel's off-center peg is located in the slot. As a result, when the peg moves around with the wheel, it can make the shaft move up and down within limits. This arrangement shows that when the drive-wheel rotates uniformly, say clockwise, the shaft moves sinusoidally up and down. The vertical position of the center of the slot, at any time , can then be expressed as , where is the radial distance from the wheel's center to the peg, is the rate at which the wheel turns (in radians per unit of time), and is the starting phase angle of the peg, measured in radians from the 12 o'clock position to the angular position where the peg was at time zero.




This arrangement makes a physical analog of just one trigonometrical term. Thomson needed to construct a physical sum of many such terms.
At first he inclined to use gears. Then he discussed the problem with engineer Beauchamp Tower before the British Association meeting in 1872, and Tower suggested the use of a device that (as he remembered) was once used by Wheatstone. It was a chain running alternately over and under a sequence of pulleys on movable shafts. The chain was fixed at one end, and the other (free) end was weighted to keep it taut. As each shaft moved up or down it would take up or release a corresponding length of the chain. The movements in position of the free (movable) end of the chain represented the sum of the movements of the different shafts. The movable end was kept taut, and fitted with a pen and a moving band of paper on which the pen plotted a tidal curve. In some designs, the movable end of the line was connected instead to a dial and scale from which tidal heights could be read off.
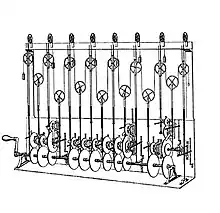
One of Thomson's designs for the calculating part of a tide-predicting machine is shown in the figure (right), closely similar to the third machine of 1879-81. A long cord, with one end held fixed, passed vertically upwards and over a first upper pulley, then vertically downwards and under the next, and so on. These pulleys were all moved up and down by cranks, and each pulley took in or let out cord according to the direction in which it moved. These cranks were all moved by trains of wheels gearing into the wheels fixed on a drive shaft. The greatest number of teeth on any wheel was 802 engaging with another of 423. All the other wheels had comparatively small numbers of teeth. A flywheel of great inertia enabled the operator to turn the machine fast, without jerking the pulleys, and so to run off a year's curve in about twenty-five minutes. The machine shown in the figure was arranged for fifteen constituents in all.
Thomson acknowledged that the use of an over-and-under arrangement of the flexible line that summed the motion components was suggested to him in August 1872 by engineer Beauchamp Tower.[10]
History
The Kelvin machine
The first tide predicting machine (TPM) was built in 1872 by the Légé Engineering Company.[11] A model of it was exhibited at the British Association meeting in 1873[12] (for computing 8 tidal components), followed in 1875-6 by a machine on a slightly larger scale (for computing 10 tidal components), was designed by Sir William Thomson (who later became Lord Kelvin).[13] The 10-component machine and results obtained from it were shown at the Paris Exhibition in 1878.
Thomson was also responsible for originating the method of harmonic tidal analysis, and for devising a harmonic analyzer machine, which partly mechanized the evaluation of the constants from the gauge readings.
The Roberts machine
An enlarged and improved version of the machine, for computing 20 tidal components, was built for the Government of India in 1879, and then modified in 1881 to extend it to compute 24 harmonic components.[14] British Tide Predictor No.2, after initial use to generate data for Indian ports, was used for tide prediction for the British empire beyond India, and transferred to the National Physical Laboratory in 1903. British Tide Predictor No.3 was sold to the French Government in 1900 and used to generate French tide tables.
In these machines, the prediction was delivered in the form of a continuous graphical pen-plot of tidal height against time. The plot was marked with hour- and noon-marks, and was made by the machine on a moving band of paper as the mechanism was turned. A year's tidal predictions for a given place, usually a chosen seaport, could be plotted by the 1876 and 1879 machines in about four hours (but the drives had to be rewound during that time).
Ferrel machine, US Tide Predicting Machine No. 1
In 1881–2, another tide predicting machine, operating quite differently, was designed by William Ferrel and built in Washington under Ferrel's direction by E. G. Fischer (who later designed the successor machine described below, which was in operation at the US Coast and Geodetic Survey from 1912 until the 1960s).[15] Ferrel's machine delivered predictions by telling the times and heights of successive high and low waters, shown by pointer-readings on dials and scales. These were read by an operator who copied the readings on to forms, to be sent to the printer of the US tide-tables.
These machines had to be set with local tidal constants special to the place for which predictions were to be made. Such numbers express the local tidal response to individual components of the global tide-generating potential, at different frequencies. This local response, shown in the timing and the height of tidal contributions at different frequencies, is a result of local and regional features of the coasts and sea-bed. The tidal constants are usually evaluated from local histories of tide-gauge observations, by harmonic analysis based on the principal tide-generating frequencies as shown by the global theory of tides and the underlying lunar theory.
Development and improvement based on the experience of these early machines continued through the first half of the 20th century.
.jpg.webp)
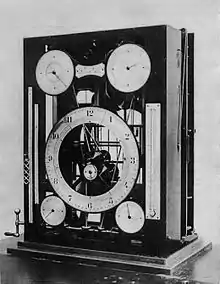
US Tide Predicting Machine No. 2
US Tide Predicting Machine No. 2 ("Old Brass Brains")[16] was designed in the 1890s by Rollin Harris, built in the United States Coast and Geodetic Survey, completed and brought into service in 1912, used for several decades including during the second World War, and retired in 1965.[17][18]
20th century
Tide-predicting machines were built in Germany during World War I, and again in the period 1935-8.[19]
Brass machines based on Thomson's original tide machine are credited for the accurate tide predictions in the build-up to the 1944 "D-Day" Normandy landings of World War II.[20]
Three of the last to be built were:
- a Tide Predicting Machine built in 1947 for the Norwegian Hydrographic Service by Chadburn of Liverpool, and designed to compute 30 tidal harmonic constituents; used until 1975 to compute official Norwegian Tide Tables, before being superseded by digital computing.[21]
- the Doodson-Légé TPM built in 1949,
- an East German TPM built 1953-5.[22]
Excluding small portable machines, a total of 33 tide-predicting machines are known to have been built, of which 2 have been destroyed and 4 are presently lost.[23]
Display and demonstration
They can be seen in London,[24] Washington,[25] Liverpool,[26] and elsewhere, including the Deutsches Museum in Munich.
Online
An online demonstration is available to show the principle of operation of a 7-component version of a tide-predicting machine otherwise like Thomson's (Kelvin's) original design.[27] The animation shows part of the operation of the machine: the motions of several pulleys can be seen, each moving up and down to simulate one of the tidal frequencies; and the animation also shows how these sinusoidal motions were generated by wheel rotations and how they were combined to form the resulting tidal curve. Not shown in the animation is the way in which the individual motions were generated in the machine at the correct relative frequencies, by gearing in the correct ratios, or how the amplitudes and starting phase angles for each motion were set in an adjustable way. These amplitudes and starting phase angles represented the local tidal constants, separately reset, and different for each place for which predictions were to be made. Also, in the real Thomson machines, to save on motion and wear of the other parts, the shaft and pulley with the largest expected motion (for the M2 tide component at twice per lunar day) was mounted nearest to the pen, and the shaft and pulley representing the smallest component was at the other end, nearest to the point of fixing of the flexible cord or chain, to minimize unnecessary motion in the most part of the flexible cord.
Notes and references
- See American Mathematical Society (2009) II.2, showing how combinations of waves in non-commensurable frequencies cannot repeat their resultant patterns exactly.
- The Proceedings of the Inst.C.E. (1881) contains minutes of a somewhat disputatious discussion that took place in 1881 over who had contributed what details. Thomson acknowledged previous work of the 1840s relating to the general mechanical solution of equations, plus a specific suggestion he had from Beauchamp Tower to use a device of pulleys and a chain once used by Wheatstone; Thomson also credited Roberts with calculating the astronomical ratios embodied in the machine, and Légé with design of the drive gear details; Roberts claimed further credit for selecting other parts of the mechanical design.
- Ferrel (1883).
- During World War I, Germany built its first tide-predicting machine in 1915-16 when it could no longer obtain British hydrographic data (see Deutsches Museum exhibit, online), and when it specially needed accurate and independently-sourced tide data for conducting the U-boat campaign (see German Maritime Museum exhibit, online).
- See Ehret (2008) at page 44).
- During the 'cold war', East Germany built its own tide-predicting machine in 1953-5 "at unbelievable expense", see German Maritime Museum (online exhibit).
- The US No.2 machine was retired in the 1960s, see Ehret (2008); the machine used in Norway continued in use until the 1970s (see Norway online exhibit).
- Parker (2011), pp. 35-36.
- Duff, G.F.D. (1983). "A special adi model for the Laplace tidal equations" (PDF). Computers & Mathematics with Applications. 9 (3): 507. doi:10.1016/0898-1221(83)90064-0. Retrieved 27 July 2023.
- Beauchamp Tower was initially referred to in Thomson's acknowledgements only as 'Mr Tower', but he was more fully identified in discussion between Thomson and E Roberts at the Institution of Civil Engineers (reported in the ICE minutes in the Proceedings, 1881).
- Parker (2011), p. 37.
- See Proceedings of the Inst.C.E. (1881), at page 31.
- see W Thomson (1881), a paper of Thomson's presented to the Institution of Civil Engineers in January 1881. Subsequent discussion at the same meeting of the Institution of Civil Engineers covered questions of history and priority about aspects of the design since 1872, see Proceedings for January 1881 especially pages 30-31. The design had been described at the British Association Meeting of 1872 and a model for an 8-component prototype shown at the British Association meeting of 1873.
- The 20-component instrument was described by E Roberts (1879).
- W Ferrel (1883); also E G Fischer (1912), at pages 273-275; also Science (1884).
- See Ehret, 2008 for its later history, and for its construction E G Fischer, and (1915) Description of the US Tide Predicting Machine No 2, see also NOAA.
- Parker (2011), p. 38.
- "History of Tidal Analysis and Prediction". NOAA. Retrieved 27 July 2023.
- See German Maritime Museum online exhibit, and Deutsches Museum online exhibit.
- Parker (2011), pp. 38-40.
- Norwegian Hydrographic Service - history.
- See German Maritime Museum (online exhibit).
- See P. L. Woodworth (2016): An inventory of tide prediction machines. National Oceanography Centre Research and Consultancy Report No. 56.
- The first complete tide-predicting machine, from 1872-3, by Thomson with contributions from Tower, Roberts, and Légé, is at the Science Museum, South Kensington, London.
- The first US tide-predicting machine by Ferrel, 1881-2, is exhibited at The Smithsonian National Museum of American History; and the second US tide-predicting machine, which gained the nickname "Old Brass Brains" (see Ehret, 2008), is exhibited at the NOAA offices in Silver Spring, MD (NOAA is the National Oceanographic and Atmospheric Administration).
- The Roberts-Légé and Doodson-Légé machines are exhibited in the Tide and Time exhibition at the Proudman Oceanographic Laboratory, Liverpool, UK.
- See American Mathematical Society/Bill Casselman (2009), animated JAVA simulation based on Kelvin's Tide Predicting Machine (the animation shows computing 7 harmonic components).
Bibliography
- T Ehret (2008), "Old Brass Brains - Mechanical Prediction of Tides", ACSM Bulletin, June 2008, pages 41–44.
- W Ferrel (1883), "A maxima and minima tide-predicting machine", in U S Coast Survey (1883), Appendix 10, pages 253-272.
- E G Fischer (1912), "The Coast and Geodetic Survey Tide Predicting Machine No. 2", Popular Astronomy, vol.20 (1912), pages 269-285.
- Institution of Civil Engineers (London), Proceedings volume 65 (1881), giving discussion after presentation of tide machines, minuted at pages 25–64.
- Parker, Bruce (September 2011). "The tide predictions for D-Day" (PDF). Physics Today. 64 (9): 35–40. doi:10.1063/PT.3.1257. Retrieved 27 July 2023.
- E Roberts (1879), "A new Tide-predicter", Proceedings of the Royal Society, xxix (1879), pages 198-201.
- Science (1884) [no author cited], "The Maxima and Minima Tide-Predicting Machine", Science, Vol.3 (1884), Issue 61, pp. 408–410.
- W Thomson (1881), "The tide gauge, tidal harmonic analyser, and tide predicter", Proceedings of the Institution of Civil Engineers, vol.65 (1881), pages 3–24.
- US Department of Commerce, Special Publication No.32 (1915), "Description of the US Coast and Geodetic Survey Tide-Predicting Machine No.2".
- P L Woodworth (2016), "An inventory of tide prediction machines", National Oceanography Centre Research and Consultancy Report No. 56.
External links
- American Mathematical Society (2009), Fourier Analysis of Ocean Tides, II.2, showing effect of components at incommensurable frequencies.
- American Mathematical Society/Bill Casselman (2009), animated JAVA simulation based on Kelvin's Tide Predicting Machine (the animation shows computing 7 harmonic components).
- Deutsches Museum, Munich, online exhibit of 2nd German tide-predicting machine (described in English).
- German Maritime Museum (online exhibit of tide prediction and tide-predicting machines, in German).
- NOAA online exhibit of US No 2 Tide Predicting Machine with additional images.
- Norway online exhibit of Norwegian tide-predicting history & use of TPM (in English).
- National Oceanography Centre, Liverpool, exhibit of Roberts-Légé and Doodson-Légé Tide Predicting Machines.
- Science Museum, South Kensington, London: Kelvin Tide Predictor in the Science Museum London, along with a closer view.
- The Smithsonian National Museum of American History, Behring Center online exhibit The Ferrel tide predicting machine of 1881-2.