Frequency
Frequency is the number of occurrences of a repeating event per unit of time.[1] It is also occasionally referred to as temporal frequency to emphasize the contrast to spatial frequency, and ordinary frequency to emphasize the contrast to angular frequency. Frequency is expressed in units of hertz (Hz) which is equivalent to one (event) per second. The corresponding period is the time duration of one cycle in a repeating event, so the period is the reciprocal of the frequency.[2] For example, if a heart beats at a frequency of 120 times a minute (2 hertz), its period, T—the time interval between beats—is half a second (60 seconds divided by 120 beats). Frequency is an important parameter used in science and engineering to specify the temporal rate of change observed in oscillatory and periodic phenomena, such as mechanical vibrations, audio signals (sound), radio waves, and light.
| Frequency | |
|---|---|
 | |
Common symbols | f, ν |
| SI unit | hertz (Hz) |
Other units |
|
| In SI base units | s−1 |
Derivations from other quantities |
|
| Dimension | |

Definitions and units

For cyclical phenomena such as oscillations, waves, or for examples of simple harmonic motion, the term frequency is defined as the number of cycles or vibrations per unit of time. The conventional symbol for frequency is f; the Greek letter (nu) is also used.[3] The period is the time taken to complete one cycle of an oscillation.[note 1] The relation between the frequency and the period is given by the equation:[5]



The term temporal frequency is used to emphasise that the frequency is characterised by the number of occurrences of a repeating event per unit time, and not unit distance.
The SI derived unit of frequency is the hertz (Hz),[5] named after the German physicist Heinrich Hertz by the International Electrotechnical Commission in 1930. It was adopted by the CGPM (Conférence générale des poids et mesures) in 1960, officially replacing the previous name, "cycles per second" (cps). The SI unit for the period, as for all measurements of time, is the second.[6] A traditional unit of measure used with rotating mechanical devices is revolutions per minute, abbreviated r/min or rpm. 60 rpm is equivalent to one hertz.[7]
Wind-generated waves are described in terms of their period rather than frequency.[8]
Period versus frequency
As a matter of convenience, longer and slower waves, such as ocean surface waves, tend to be described by wave period rather than frequency. Short and fast waves, like audio and radio, are usually described by their frequency instead of period. Some commonly used conversions are listed below:
| Frequency | 1 mHz (10−3 Hz) | 1 Hz (100 Hz) | 1 kHz (103 Hz) | 1 MHz (106 Hz) | 1 GHz (109 Hz) | 1 THz (1012 Hz) |
|---|---|---|---|---|---|---|
| Period | 1 ks (103 s) | 1 s (100 s) | 1 ms (10−3 s) | 1 μs (10−6 s) | 1 ns (10−9 s) | 1 ps (10−12 s) |
Related types of frequency

- Angular frequency, usually denoted by the Greek letter ω (omega), is defined as the rate of change of angular displacement (during rotation), θ (theta), or the rate of change of the phase of a sinusoidal waveform (notably in oscillations and waves), or as the rate of change of the argument to the sine function: Angular frequency is commonly measured in radians per second (rad/s) but, for discrete-time signals, can also be expressed as radians per sampling interval, which is a dimensionless quantity. Angular frequency (in rad/s) is larger than ordinary frequency (in Hz) by a factor of 2π.
- Spatial frequency is analogous to temporal frequency, but the time axis is replaced by one or more spatial displacement axes, e.g.: Wavenumber, k, is the spatial frequency analogue of angular temporal frequency and is measured in radians per metre. In the case of more than one spatial dimension, wavenumber is a vector quantity.




In wave propagation
For periodic waves in nondispersive media (that is, media in which the wave speed is independent of frequency), frequency has an inverse relationship to the wavelength, λ (lambda). Even in dispersive media, the frequency f of a sinusoidal wave is equal to the phase velocity v of the wave divided by the wavelength λ of the wave:

In the special case of electromagnetic waves moving through a vacuum, then v = c, where c is the speed of light in a vacuum, and this expression becomes:

When monochromatic waves travel from one medium to another, their frequency remains the same—only their wavelength and speed change.
Measurement
Measurement of frequency can be done in the following ways:
Counting
Calculating the frequency of a repeating event is accomplished by counting the number of times that event occurs within a specific time period, then dividing the count by the length of the time period. For example, if 71 events occur within 15 seconds the frequency is:

If the number of counts is not very large, it is more accurate to measure the time interval for a predetermined number of occurrences, rather than the number of occurrences within a specified time.[9] The latter method introduces a random error into the count of between zero and one count, so on average half a count. This is called gating error and causes an average error in the calculated frequency of , or a fractional error of where is the timing interval and is the measured frequency. This error decreases with frequency, so it is generally a problem at low frequencies where the number of counts N is small.





Stroboscope
An old method of measuring the frequency of rotating or vibrating objects is to use a stroboscope. This is an intense repetitively flashing light (strobe light) whose frequency can be adjusted with a calibrated timing circuit. The strobe light is pointed at the rotating object and the frequency adjusted up and down. When the frequency of the strobe equals the frequency of the rotating or vibrating object, the object completes one cycle of oscillation and returns to its original position between the flashes of light, so when illuminated by the strobe the object appears stationary. Then the frequency can be read from the calibrated readout on the stroboscope. A downside of this method is that an object rotating at an integer multiple of the strobing frequency will also appear stationary.
Frequency counter

Higher frequencies are usually measured with a frequency counter. This is an electronic instrument which measures the frequency of an applied repetitive electronic signal and displays the result in hertz on a digital display. It uses digital logic to count the number of cycles during a time interval established by a precision quartz time base. Cyclic processes that are not electrical, such as the rotation rate of a shaft, mechanical vibrations, or sound waves, can be converted to a repetitive electronic signal by transducers and the signal applied to a frequency counter. As of 2018, frequency counters can cover the range up to about 100 GHz. This represents the limit of direct counting methods; frequencies above this must be measured by indirect methods.
Heterodyne methods
Above the range of frequency counters, frequencies of electromagnetic signals are often measured indirectly utilizing heterodyning (frequency conversion). A reference signal of a known frequency near the unknown frequency is mixed with the unknown frequency in a nonlinear mixing device such as a diode. This creates a heterodyne or "beat" signal at the difference between the two frequencies. If the two signals are close together in frequency the heterodyne is low enough to be measured by a frequency counter. This process only measures the difference between the unknown frequency and the reference frequency. To reach higher frequencies, several stages of heterodyning can be used. Current research is extending this method to infrared and light frequencies (optical heterodyne detection).
Examples
Light

Visible light is an electromagnetic wave, consisting of oscillating electric and magnetic fields traveling through space. The frequency of the wave determines its color: 400 THz (4×1014 Hz) is red light, 800 THz (8×1014 Hz) is violet light, and between these (in the range 400–800 THz) are all the other colors of the visible spectrum. An electromagnetic wave with a frequency less than 4×1014 Hz will be invisible to the human eye; such waves are called infrared (IR) radiation. At even lower frequency, the wave is called a microwave, and at still lower frequencies it is called a radio wave. Likewise, an electromagnetic wave with a frequency higher than 8×1014 Hz will also be invisible to the human eye; such waves are called ultraviolet (UV) radiation. Even higher-frequency waves are called X-rays, and higher still are gamma rays.
All of these waves, from the lowest-frequency radio waves to the highest-frequency gamma rays, are fundamentally the same, and they are all called electromagnetic radiation. They all travel through a vacuum at the same speed (the speed of light), giving them wavelengths inversely proportional to their frequencies.

where c is the speed of light (c in a vacuum or less in other media), f is the frequency and λ is the wavelength.
In dispersive media, such as glass, the speed depends somewhat on frequency, so the wavelength is not quite inversely proportional to frequency.
Sound
Sound propagates as mechanical vibration waves of pressure and displacement, in air or other substances.[10] In general, frequency components of a sound determine its "color", its timbre. When speaking about the frequency (in singular) of a sound, it means the property that most determines its pitch.[11]
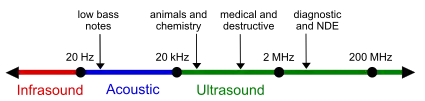
The frequencies an ear can hear are limited to a specific range of frequencies. The audible frequency range for humans is typically given as being between about 20 Hz and 20,000 Hz (20 kHz), though the high frequency limit usually reduces with age. Other species have different hearing ranges. For example, some dog breeds can perceive vibrations up to 60,000 Hz.[12]
In many media, such as air, the speed of sound is approximately independent of frequency, so the wavelength of the sound waves (distance between repetitions) is approximately inversely proportional to frequency.
Line current
In Europe, Africa, Australia, southern South America, most of Asia, and Russia, the frequency of the alternating current in household electrical outlets is 50 Hz (close to the tone G), whereas in North America and northern South America, the frequency of the alternating current in household electrical outlets is 60 Hz (between the tones B♭ and B; that is, a minor third above the European frequency). The frequency of the 'hum' in an audio recording can show where the recording was made, in countries using a European, or an American, grid frequency.
Aperiodic frequency
Aperiodic frequency is the rate of incidence or occurrence of non-cyclic phenomena, including random processes such as radioactive decay. It is expressed in units of measurement of reciprocal seconds (s−1)[13] or, in the case of radioactivity, becquerels.[14]
It is defined as a ratio, f = N/T, involving the number of times an event happened (N) during a given time duration (T); it is a physical quantity of type temporal rate.
See also
- Audio frequency
- Bandwidth (signal processing)
- Cutoff frequency
- Downsampling
- Electronic filter
- Fourier analysis
- Frequency band
- Frequency converter
- Frequency domain
- Frequency distribution
- Frequency extender
- Frequency grid
- Frequency modulation
- Frequency spectrum
- Interaction frequency
- Least-squares spectral analysis
- Natural frequency
- Negative frequency
- Periodicity (disambiguation)
- Pink noise
- Preselector
- Radar signal characteristics
- Signaling (telecommunications)
- Spread spectrum
- Spectral component
- Transverter
- Upsampling
- Orders of magnitude (frequency)
Notes
- The term spatial period, sometimes used in place of wavelength, is a different quantity.[4]
References
- "Definition of FREQUENCY". Retrieved 3 October 2016.
- "Definition of PERIOD". Retrieved 3 October 2016.
- Serway & Faughn 1989, p. 346.
- Boreman, Glenn D. "Spatial Frequency". SPIE. Retrieved 22 January 2021.
- Serway & Faughn 1989, p. 354.
- "Resolution 12 of the 11th CGPM (1960)". BIPM (International Bureau of Weights and Measures). Archived from the original on 8 April 2020. Retrieved 21 January 2021.
- Davies 1997, p. 275.
- Young 1999, p. 7.
- Bakshi, K.A.; A.V. Bakshi; U.A. Bakshi (2008). Electronic Measurement Systems. US: Technical Publications. pp. 4–14. ISBN 978-81-8431-206-5.
- "Definition of SOUND". Retrieved 3 October 2016.
- Pilhofer, Michael (2007). Music Theory for Dummies. For Dummies. p. 97. ISBN 978-0-470-16794-6.
- Condon, Tim (2003). Elert, Glenn (ed.). "Frequency range of dog hearing". The Physics Factbook. Retrieved 2008-10-22.
- Lombardi, Michael A. (2007). "Fundamentals of Time and Frequency". In Bishop, Robert H. (ed.). Mechatronic Systems, Sensors, and Actuators: Fundamentals and Modeling. Austin: CRC Press. ISBN 9781420009002.
- Bureau international des poids et mesures, Le Système international d'unités (SI) / The International System of Units (SI), 9th ed. (Sèvres: 2019), ISBN 978‑92‑822‑2272‑0, sub§2.3.4, Table 4.
Sources
- Davies, A. (1997). Handbook of Condition Monitoring: Techniques and Methodology. New York: Springer. ISBN 978-0-412-61320-3.
- Serway, Raymond A.; Faughn, Jerry S. (1989). College Physics. London: Thomson/Brooks-Cole. ISBN 978-05344-0-814-5.
- Young, Ian R. (1999). Wind Generated Ocean Waves. Elsevere Ocean Engineering. Vol. 2. Oxford: Elsevier. ISBN 978-0-08-043317-2.
Further reading
- Giancoli, D.C. (1988). Physics for Scientists and Engineers (2nd ed.). Prentice Hall. ISBN 978-0-13-669201-0.
External links
- Keyboard frequencies = naming of notes – The English and American system versus the German system
- A frequency generator with sound, useful for hearing tests
Acoustics | ||
|---|---|---|
| Acoustical engineering |
|
|
| Psychoacoustics |
| |
| Frequency and pitch |
| |
| Acousticians |
| |
| Related topics |
| |
| ||
