Acoplamiento mecánico
Se llama acoplamiento mecánico a una serie de enlaces rígidos, con ligamentos que forman una cadena cerrada o una serie de cadenas cerradas. Cada ligamento tiene uno o más ligas, y estas tienen diferentes grados de libertad que les permiten tener movilidad entre los ligamentos. Un acoplamiento mecánico se llama mecanismo si dos o más ligas se pueden mover con respecto a un ligamento fijo. Los acoplamientos mecánicos suelen diseñarse con una entrada y producen una salida, alteran el movimiento, la velocidad, la aceleración, y aplican una ventaja mecánica. Un acoplamiento mecánico que se diseña para ser estacionario se denomina estructura.

Historia

Los acoplamientos mecánicos son una parte fundamental del diseño de máquinas, y los más simples acoplamientos no fueron inventados o ni siquiera entendidos hasta el siglo XIX. Tomemos un simple palo: posee seis grados de libertad, tres de los cuales son las coordenadas de su centro en el espacio, los otros tres describen su rotación. Una vez unido entre un bloque de piedra y un punto de apoyo y es consignado a un movimiento particular, actuando como una palanca para mover el bloque. Cuantas más uniones son añadidas en varios mods su movimiento colectivo se define mayor precisión. Con un acoplamiento formado por solo unas pocas partes, se pueden conseguir movimientos muy complejos y precisos.
La Revolución industrial fue la época de oro de los acoplamientos mecánicos. Los avances en matemáticas, ingeniería y manufactura proveyeron tanto la necesidad como la capacidad de crear nuevos mecanismos. Muchos mecanismos simples que parecen obvios hoy, requirieron algunas de las más brillantes mentes de la era para ser creados. Leonhard Euler fue uno de los primeros matemáticos en estudiar la síntesis de los acoplamientos, y James Watt trabajó arduamente para inventar el movimiento en paralelo que soporta el pistón de su máquina de vapor. Pafnuti Lvóvich Chebyshov trabajó en el diseños de acoplamientos mecánicos durante más de treinta años, los cuales le guiraon a crear sus polinomios1. Nuevas invenciones de acoplamientos mecánicos, diseñados por la necesidad, fueron un instrumento en la maquinaría de hilados, dando poder de conversión y regulando la velocidad. Inclusive la capacidad de un mecanismo para producir un movimiento lineal preciso, sin una guía de referencia, requirió años para solucionarse.
Científicos, mayormente alemanes, rusos e ingleses, han investigado este campo durante los últimos 200 años, así que el análisis tradicional o los problemas de síntesis (como los de movimiento planar) han sido resueltos (ver las bibliotecas en línea en los enlaces externos, en alemán e inglés).
La tecnología electrónica de hoy día, hace uso del acoplamiento mecánico en aplicaciones tales como la computación mecánica, el teclear y la maquinaria. De todos modos, los diseños modernos de acoplamiento mecánico continúan avanzando, y los diseños que ocupaban a un ingeniero durante días, hoy pueden ser optimizados por una computadora en segundos.
Inclusive los servomotores con un control digital son comunes, y a primera vista fáciles de usar, sin embargo algunos problemas de movimiento (especialmente para movimientos rápidos y precisos) aún son solamente resueltos por medio de acoplamientos mecánicos.
Actualmente, los acoplamientos mecánicos han retomado gran importancia en la construcción de robots, donde en Japón existe también una historia de desarrollo e investigación muy avanzada sobre acoplamientos mecánicos.
Teoría
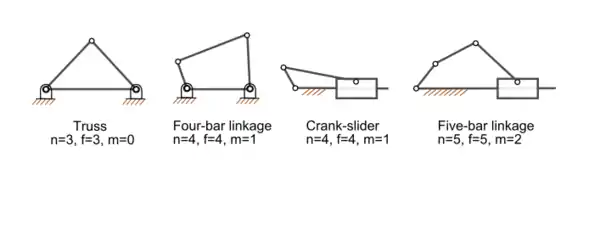
Los acoplamientos más simples tienen un grado de libertad de uno, lo que significa que hay una entrada de movimiento ("input motion", en inglés) que produce una salida de movimiento ("output motion", en inglés). La mayoría de los acoplamientos son también planares, significando que todos los movimientos toman lugar en un solo plano. Los acoplamientos espaciales (no-planar) son más difíciles de diseñar y por lo tanto, no tan comunes.
Para calcular los grados de libertad en los acoplamientos, se emplea la ecuación de Kutzbach-Gruebler. El número de grados de libertad de un acoplamiento es también llamado movilidad.
Una versión simplificada de la ecuación de Kutzbach-Gruebler para los acoplamientos planares es:
| Símbolo | Nombre |
|---|---|
| Movilidad (Grados de libertad) | |
| Número de uniones (incluyendo la unión a tierra) | |
| Número de pares cinemáticos de un grado de libertad (pin o bola movible) |




Una forma más general de la ecuación de Kutzbach-Gruebler para los acoplamientos planares conteniendo uniones más complejas:

O, para acoplamientos espaciales (acoplamientos que se llevan a cabo en un movimiento en 3D):
| Símbolo | Nombre |
|---|---|
| Movilidad (Grados de libertad) | |
| Número de uniones (incluyendo una unión a tierra) | |
| Número total de uniones, sin tomar en cuenta la conectividad o los grados de libertad | |
| Suma de los grados de libertad de cada unión |


La movilidad de una máquina hidráulica puede ser fácilmente identificada contando el número de cilindros hidráulicos controlados independientemente.
Tipos de uniones:
- Pin, rotación de GDL (Grado De Libertad) de uno. Algunos ejemplos son: bujes, cojinetes, pernos, empalmes, remaches y bisagras.
- Semiesféricos, movimiento linear de GDL de uno o dos. cojinetes lineares, cilindros hidráulicos, rodillos y pistones.
- Bolla y socket, rotación de GDL de tres, usualmente restringido a un GDL de uno por las otras uniones en el mecanismo.
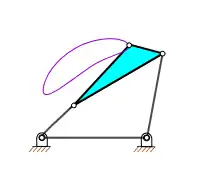
Los diseñadores sintetizarán un acoplamiento comenzando por un movimiento de salida requerido, una ventaja mecánica, velocidad y aceleración. Un tipo de acoplamiento es escogido y modificado para dar el desempleño requerido.
Cada unión es tratada como un vector, y los vectores pueden ser combinados en un sistema de ecuaciones, porque estos forman un circuito. La matriz es resuelta para crear una ecuación de forma cerrada que relaciona las entradas de movimiento con los movimientos de salida. Lo mismo es hecho para la ventaja mecánica, o en otra cantidad importante. Las ecuaciones de movimiento son derivadas con respecto al tiempo para encontrar la velocidad y aceleración de las partes del mecanismo.
Tipos de acoplamientos
Los acoplamientos mecánicos pueden dividirse en acoplamientos rígidos, flexibles y especiales o articulados.
Acoplamientos rígidos
- acoplamientos rígidos de manguitos
- acoplamientos rígidos de platillos
- acoplamientos rígidos por sujeción cónica.
Acoplamientos flexibles
- acoplamiento flexible de manguitos de goma
- acoplamiento flexible de disco flexible
- acoplamiento flexible de fuelle helicoidal
- acoplamiento flexible de quijada de goma
- acoplamiento flexible direccional de tipo Falk
- acoplamiento flexible de cadenas
- acoplamiento flexible de engrane
- acoplamiento flexible de muelle metálico
Acoplamientos especiales o articulados
- junta eslabonada de desplazamiento lateral
- junta universal (más bien conocida como cruceta o cardán)
Usos
Los acoplamientos tienen por función prolongar líneas de transmisión de ejes o conectar tramos de diferentes ejes, estén o no alineados entre sí.
Enlaces externos
 Wikimedia Commons alberga una galería multimedia sobre Acoplamiento mecánico.
Wikimedia Commons alberga una galería multimedia sobre Acoplamiento mecánico.- Una biblioteca que habla sobre los acoplamientos (actualmente casi todo en alemán) está disponible en Biblioteca Digital sobre Mecánica (en alemán: Digitale Mechanismen- und Getriebebibliothek)
- En KMODDL hay una fuente en línea en inglés (contiene literatura en otros idiomas también)
- Explicamos todo sobre los distintos tipos de acoplamientos y motores de corriente continua.
| Control de autoridades |
|
|---|
 Datos: Q1153014
Datos: Q1153014- Multimedia: Mechanical linkages / Q1153014