Estructuras de datos persistentes
En computación, una estructura de datos persistente es una estructura de datos que siempre preserva sus versiones anteriores, después de ser modificada. Este tipo de estructura son objetos inmutables, ya que sus operaciones no modifican la estructura actual, sino que crean una nueva estructura modificada. (Este artículo utiliza el término Persistencia de datos para referirse a datos obsoletos; no confundir con el significado de almacenamiento de información en un medio persistente, como un disco duro.)
Una estructura es parcialmente persistente si se puede acceder a todas sus versiones, pero solo se puede modificar la última. Una estructura es completamente persistente si todas las versiones pueden ser accedidas y modificadas. Si también existe la posibilidad de mezclar dos versiones de la estructura, se dice que esta es confluently persistent. Las estructuras que no son persistentes son llamadas transitorias.[1]
Este tipo de estructuras son comunes particularmente en programación lógica y programación funcional. En un lenguaje de programación puramente funcional todos los datos son inmutables, así que todas las estructuras son completamente persistentes.[1]
La persistencia se puede lograr simplemente copiando las estructuras completas, pero esto puede ser muy ineficiente en cuanto a cálculos del CPU y consumo de memoria RAM, debido a que generalmente solo se hacen pequeños cambios. Lo mejor sería explotar la similitud que existe entre la nueva versión y sus versiones anteriores, y compartir parte de su estructura con ellas, como por ejemplo, utilizar algunos sub-árboles que no se modificaron para el caso de las estructuras formadas por árboles. De todas formas, debido a que rápidamente se vuelve no factible determinar cuantas versiones anteriores comparten partes en común con la estructura actual y a que a veces se hace necesario descartar versiones anteriores, es necesario contar con recolector de basura.
Parcialmente Persistente
En el modelo de persistencia parcial, se puede acceder a la información de versiones anteriores pero solo se puede modificar la última versión. Esto implica un orden total entre las versiones.
Tres métodos para Árbol binario de búsqueda auto-balanceable:
Nodo Grueso
El método del nodo gordo consiste en almacenar todos los cambios hechos a propiedades de un nodo de la estructura, en el mismo nodo, si borrar los valores anteriores de sus propiedades. Esto requiere que los nodos puedan ser arbitrariamente “gruesos”. Cada nodo debe permitir guardar cualquier cantidad de campos adicionales. Cada campo adicional tiene una propiedad, un valor y una marca de tiempo que indica la versión en la cual dicha propiedad tomó ese valor. Además cada nodo tiene una marca de tiempo que indica la versión en la que dicho nodo fue creado. El motivo de que los nodos tengan marcas de tiempo es para asegurar que cada nodo tenga un solo valor para cada propiedad para cada versión. Para poder recorrer la estructura, cada campo original tiene cero como marca de tiempo.
Complejidad de Nodo Grueso
Utilizando el método Nodo Grueso, se requiere O(1) de espacio por cada modificación: solo almacenar el nuevo valor. Cada modificación necesita O(1) de tiempo adicional para almacenar el cambio al final de la lista de cambios. Esto es una cota Costo amortizado, asumiendo que guardamos la lista de modificación en un vector (informática) que puede crecer. Para el acceso, debemos encontrar la versión correcta en cada nodo mientras recorremos la estructura. Si hacemos m modificaciones, entonces cada operación de acceso tiene un factor O(log m) que resulta de buscar la modificación más cercana en el historial de modificaciones.
Copia de Camino
Copia de camino consiste en copiar todos los nodos en el camino desde la raíz del árbol hasta el nodo que vamos actualizar, insertar o borrar. Después hay que actualizar en cascada el cambio: todos los nodos que apuntaban a un nodo viejo deben apuntar al nodo nuevo. Estas modificaciones provocan más cambios en cascada, y así sucesivamente, hasta que lleguemos a la raíz. Se mantiene además una lista de raíces indexadas por marcas de tiempo, de forma tal, que la estructura que tiene como raíz t es exactamente la t-ésima versión.
Complejidad de Copia de Camino
El costo de modificación temporal y espacial está dado por el tamaño de la estructura, debido a que una modificación puede afectarla completamente. En el caso de los árboles que tengan altura logarítmica, se puede garantizar que el costo de modificación será O(log n) donde n es la cantidad de nodos del árbol, ya que solo cambian los que están en el camino de la raíz al nodo que se va a modificar.
Una combinación
Sleator, Tarjan et al. proponen una combinación que aprovecha las ventajas de los nodos gruesos y de copiar el camino, obteniendo O(1) de costo adicional temporal y O(1) de costo adicional espacial para el acceso y la modificación.
En cada nodo se guarda una campo de modificación. Este campo puede almacenar una modificación de una propiedad del nodo o una modificación de uno de sus punteros, con una marca de tiempo que indica la versión en la que se hizo la modificación. Inicialmente el campo de modificación de cada nodo está vacío.
Cada vez que se accede a un nodo, se chequea el campo de modificación, y se compara la marca de tiempo con la versión que se está accediendo. Si el campo de modificación está vacío, o la versión de acceso es anterior a la marca de tiempo, entonces se ignora el campo de modificación. De lo contrario, si la versión de acceso es posterior a la marca de tiempo, entonces se utiliza el valor que está en el campo de modificación. Por ejemplo, si el campo de modificación tiene un nuevo puntero al hijo izquierdo (en el caso de un árbol binario), entonces se considera que este es el hijo izquierdo del nodo.
Para modificar un nodo (se asume que una modificación cambia un puntero o una propiedad de un nodo), si el campo de modificación del nodo está vacío, lo llenamos con la modificación. De lo contrario, se crea una copia del nodo, pero utilizando solo los últimos valores, o sea sobrescribiendo la propiedad o puntero que se encuentra en el campo de modificación, y se hace la modificación directamente en el nuevo nodo, sin utilizar el campo de modificación, o sea, se sobrescribe la propiedad o el puntero directamente y el campo de modificación se queda vacío. Finalmente se propaga en cascada este cambio al padre del nodo, de la misma forma que se hace en copia del camino. Si el nodo no tiene padre, o sea, es la raíz, y hay que copiarla, se añade en una lista ordenada de raíces.
Con este algoritmo, dado una versión t, a lo sumo un campo de modificación existe con tiempo t. Por lo tanto, una modificación en el tiempo t, divide el árbol en tres partes: una parte contiene los datos antes del tiempo t, otra contiene los datos después del tiempo t, y la otra parte no fue afectada por la modificación.
Complejidad de la combinación
El costo temporal y espacial requiere un análisis amortizado. Una modificación toma costo espacial amortizado O(1), y costo temporal amortizado O(1). Para demostrarlo, se utiliza una función potencial ϕ, donde ϕ(T) es el número de nodos llenos vivos en T. Los nodos vivos de T, son aquellos que son accesibles desde la raíz actual, en el tiempo actual, o sea, después de la última modificación. Los nodos llenos vivos, son los nodos vivos que tienen algo en su campo de modificación.
Cada modificación conlleva cierto número de copias, digamos k, seguidas de 1 cambio en un campo de modificación. Cada una de las k copias tiene O(1) costo temporal y espacial, pero disminuye la función potencial en uno, debido a que el nodo que se copia debe estar lleno y vivo, por lo tanto contribuye a la función potencial, pero al copiarlo y cambiar el puntero de su padre dejará de estar vivo, y la copia tiene el campo de modificación vacío así que no está llena, por lo tanto se reemplazó un nodo lleno vivo, por uno que no está lleno). El último paso llena un campo de modificación, esto tiene O(1) de costo temporal y aumenta ϕ en uno.
En resumen, el cambio en ϕ es Δϕ = 1 − k, por lo tanto el costo espacial total es O(k +Δϕ) = O(1) y el costo temporal total es O(k +Δϕ +1) = O(1).
Ejemplos de estructuras persistentes
Probablemente la estructura persistente más sencilla sea la lista enlazada, una simple lista de objetos, donde cada uno tiene una referencia el siguiente. Para que sea persistente cuando se modifica un nodo, la nueva versión puede compartir con la anterior, los nodos que estaban después de él, o sea, la cola.
Muchas de las estructuras basadas en enlaces, como red-black trees,[2] stacks,[3] y treaps,[4] pueden ser adaptadas fácilmente para crear una versión persistente de la misma. Otras necesitan demasiado esfuerzo por ejemplo un min-deque.
Listas enlazadas
Este ejemplo es tomado de Okasaki. Ver las referencias.
La lista enlazada es las estructuras más utilizada en los lenguajes de programación funcionales.
Considere las dos listas:
xs = [0, 1, 2] ys = [3, 4, 5]
Estas deben ser representadas en memoria de la siguiente forma:
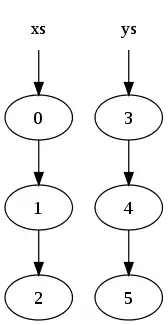
donde un círculo significa un nodo de la lista, y las flechas referencias hacia el nodo que apuntan
Concatenar las dos listas:
zs = xs ++ ys
resulta en la siguiente estructura en memoria:
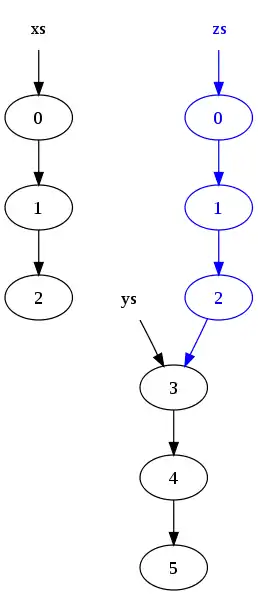
Notar que los nodos en la lista xs han sido copieados, pero los nodos en ys son compartidos. Como resultado, las listas originales (xs y ys) persisten y no han sido modificadas.
La razón de la copia es que el último nodo en xs no puede ser modificado para apuntar el inicio de ys, porque eso cambiaría el valor de xs.
Árboles
Este ejemplo es tomado de Okasaki. Ver las referencias.
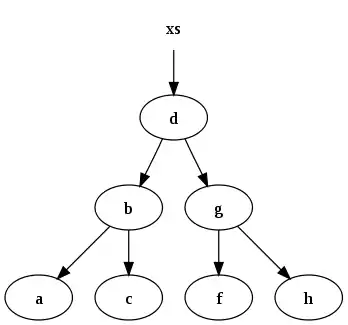
Consideremos un árbol binario utilizado para buscar de forma rápida, donde cada nodo tiene la invariante recursiva de que los valores de los nodos a la izquierda son menores que su valor, y los de la derecha son mayores.
Por ejemplo:
xs = [a, b, c, d, f, g, h]
puede ser representado por el siguiente árbol binario:
Después de ejecutar de insertar "e" en xs obtenemos lo siguiente:
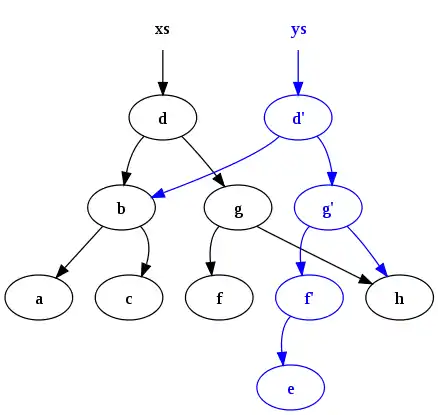
Notemos que el árbol original xs persiste y muchos nodos son compartidos entre ambas versiones. Este tipo de persistencia es muy difícil de manejar sin recolector de basura, para que libere la memoria de los nodos que ya no pueden ser accedidos, es por esto que esta característica es muy común en la programación funcional
Referencias
- Kaplan, Haim (2001). «Persistent data structures». Handbook on Data Structures and Applications (CRC Press).
- Neil Sarnak, Robert E. Tarjan (1986). «Planar Point Location Using Persistent Search Trees». Communications of the ACM 29 (7): 669-679. doi:10.1145/6138.6151. Archivado desde el original el 10 de octubre de 2015. Consultado el 24 de diciembre de 2014.
- Chris Okasaki. Purely Functional Data Structures (thesis).
- Liljenzin, Olle. Confluently Persistent Sets and Maps.
Futura lectura
- Persistent Data Structures and Managed References - video presentation by Rich Hickey on Clojure's use of persistent data structures and how they support concurrency
- Making Data Structures Persistent by James R. Driscoll, Neil Sarnak, Daniel D. Sleator, Robert E. Tarjan
- Fully persistent arrays for efficient incremental updates and voluminous reads
- Real-Time Deques, Multihead Turing Machines, and Purely Functional Programming
- Purely functional data structures by Chris Okasaki, Cambridge University Press, 1998, ISBN 0-521-66350-4.
- Purely Functional Data Structures thesis by Chris Okasaki (PDF format)
- Fully Persistent Lists with Catenation by James R. Driscoll, Daniel D. Sleator, Robert E. Tarjan (PDF)
- Persistent Data Structures from MIT open course Advanced Algorithms