Forma canónica de Jordan
En álgebra lineal, la forma canónica de Jordan es la forma de la matriz de un endomorfismo de un espacio vectorial en cierta base asociada a la descomposición en suma directa de subespacios invariantes bajo dicho endomorfismo. Dicha forma canónica consistirá en que la matriz estará formada por "bloques de Jordan" en la diagonal y bloques de ceros fuera de ella.

Introducción
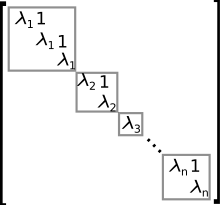
Sea un endomorfismo sobre un -espacio vectorial de dimensión . Si el polinomio característico de se factoriza completamente sobre el cuerpo (es decir, es el cuerpo de descomposición del polinomio característico de la matriz), existe una base donde la aplicación lineal viene dada por una "matriz de m bloques" () con la siguiente forma.







Donde cada submatriz es un bloque de Jordan.


Donde son raíces del polinomio característico (valores propios), y
Cuando es diagonalizable, vale que y , por lo que la forma canónica de Jordan de la matriz es una matriz diagonal.





Ejemplo
Considérese la situación de una matriz diagonalizable. Una matriz cuadrada es diagonalizable si la suma de las dimensiones de los espacios propios (eigenspaces) es el número de filas o columnas de la matriz. Examinemos la matriz siguiente:

Tenemos valores propios de A que son solo λ = 5, 5, 5, 5. Ahora bien, la dimensión del núcleo de es 1 (donde representa la matriz identidad de orden 4), por lo tanto A no es diagonalizable. Sin embargo, podemos construir la forma de Jordan de esta matriz. Dado que la dimensión es 1, sabemos que la forma de Jordan está compuesta de solo un bloque de Jordan, es decir, la forma de Jordan de A es:



Obsérvese que J puede escribirse como , donde N es una matriz nilpotente. Puesto que ahora tenemos A similar a dicha matriz simple, podremos realizar cálculos que involucren a A usando la forma de Jordan, lo que en muchos casos puede simplificar el cálculo. Por ejemplo, calcular potencias de matrices es significativamente más sencillo usando la forma de Jordan.

Cálculo de la forma de Jordan
1) Supongamos que se quiere diagonalizar la siguiente matriz

Primeros calculamos el polinomio característico y vemos si es diagonalizable.


Hacemos y obtenemos los autovalores y , este último de multiplicidad algebraica 2. Para ver si es diagonalizable buscamos los autovectores, estos conforman las bases de los espacios (es decir los espacios propios ). Para el primer valor propio obtenemos :







de donde se resuelve que . En particular, un vector de la base (el más simple sin contar el nulo) es (1,1,0).

Ahora para el otro autovalor

Es decir que obtuvimos pero este espacio es unidimensional luego no alcanzan los autovectores para construir una base de (suponiendo que estamos trabajando en este espacio) y por lo tanto NO ES diagonalizable. ¿Cómo reducir esta matriz a una forma simple entonces si no la podemos hacer diagonal? Precisamente de esto se trata la forma de Jordan, buscaremos un vector más, linealmente independiente respecto de los anteriores de modo que podamos construir la matriz de pasaje tal que quede triangular, en vez de diagonal, expresada como bloques de Jordan.


Sea B esta base, debe estar conformada por tres vectores y solo tenemos dos. Hay varias maneras de encontarlo, una es proponer y buscar las coordenadas (a,b,c) tal que se cumpla donde J es la matriz en forma canónica de Jordan y P es la matriz cambio de base de B a la base canónica de . Por la manera en la que definimos la base B la matriz J tiene que ser



es decir que basta efectuar los productos mencionados e igualarlos, queda

Queda formado entonces el siguiente sistema

que son infinitos vectores de la forma (notemos que se trata de una múltiplo del autovector asociado al autovalor 2 pero con una coordenada sumada). En particular para se obtiene una de las infinitas soluciones .



En general, cualquier matriz de la forma cumple que

- .

Nota: podemos resolver el sistema PJ=AP triangulando la matriz ampliada . Este algoritmo será analizado en el siguiente ejemplo con más detalle.

2) Tomemos ahora una matriz similar a la anterior

de la cual buscamos la forma de Jordan. El polinomio característico es
- .

Veamos que para obtenemos un único autovalor , esto significa que no es diagonalizable ya que la única manera de obtener que (y por lo tanto ) es que sea la matriz nula, o lo que es lo mismo, que A sea una matriz diagonal cuya única entrada no nula sea 3.




Busquemos entonces los autovectores...

Es decir esto equivale a afirmar que el vector genera el subespacio .



Para encontrar otro vector linealmente independiente, podemos triangular la matriz A-2I ampliada con las coordenadas del autovector (asociado a este autovalor 2) como columna.

Si llamamos tenemos vectores de la forma ¡que son combinaciones lineales del autovector! Sin embargo todavía nos falta un vector más para construir una base de , este se obtiene sustituyendo la solución en el producto .



![{\displaystyle (A-2I)[{\mathbf {v} }]}](../I/e4ec8941d90233486549607d4f248e5db7de655b.svg)
- y por lo tanto la base buscada es . Es importante ponerlos en este orden, de otro modo la matriz en esta base no estará constituida por bloques de Jordan.


Formamos

3) Hallar la forma canónica de Jordan de la matriz

Hallamos el polinomio característico:

Sus raíces son y con multiplicidades 4 y 1 respectivamente.
Buscamos los autovectores, comencemos con



Triangulamos

Por lo tanto el espacio propio asociado a este autovalor es . Resulta evidente que la matriz no es diagonalizable, ya que la multiplicidad geométrica es menor que 4, o lo que es equivalente, .


Por ahora, busquemos el otro autovector.


Es decir que, si designamos obtenemos .


Buscamos la base en la cual A tiene la forma de Jordan. Para tenemos que hallar 3 vectores más que sean linealmente independientes con , pues la multiplicidad de es 4 y nosotros tenemos un único vector. Una forma de encontrar estos vectores es la siguiente.


Hallar las potencias hasta que la dimensión del último sea la multiplicidad de la raíz (4 en este caso).


Obtenemos que el rango es 3, luego su nulidad es 2. Resolviendo el sistema se obtiene que todas las coordenadas de los vectores de han de valer cero, excepto las dos primeras. Como , sabemos que podemos expandir la base de para obtener una base de . Elegimos entonces el vector . Así: .







El rango de esta matriz es . Su nulidad es por tanto 3. Resolvemos el sistema y observamos que las dos últimas coordenadas han de valer 0. Expandimos la base de para obtener la de , por ejemplo con el vector (0,0,1,0,0):





En este caso, la nulidad de es n(E)=4, y como la dimensión de (es decir, la nulidad de ) no puede ser superior a la multiplicidad algebraica del autovalor 1, que es 4, ya hemos llegado a la dimensión máxima. Resolvemos el sistema y concluímos que la suma de las últimas dos coordenadas ha de ser nula. Ahora tomamos un vector pero que no pertenezca a ninguno de los anteriores. Por ejemplo, . Obtenemos así la base de :






- .

Ahora hay que hallar .

- .



Como , ya tenemos los 5 vectores de la nueva base.

La matriz de cambio de base es

Para hallar la matriz de Jordan solo hay que hacer las imágenes por A, de los vectores de la base de Jordan, y expresarlos en dicha base:






Se cumple

Enlaces externos
- Utilidad en línea para calcular la forma canónica de Jordan y diagonalización de matrices by www.mathstools.com
| Control de autoridades |
|
|---|
 Datos: Q838495
Datos: Q838495