Bloqueo mutuo
En sistemas operativos, el bloqueo mutuo (también conocido como interbloqueo, traba mortal, deadlock, abrazo mortal) es el bloqueo permanente de un conjunto de procesos o hilos de ejecución en un sistema concurrente que compiten por recursos del sistema o bien se comunican entre ellos.[1] A diferencia de otros problemas de concurrencia de procesos, no existe una solución general para los interbloqueos.
Todos los interbloqueos surgen de necesidades que no pueden ser satisfechas, por parte de dos o más procesos. En la vida real, un ejemplo puede ser el de dos niños que intentan jugar al arco y flecha, uno toma el arco, el otro la flecha. Ninguno puede jugar hasta que alguno libere lo que tomó.
Representación de Bloqueos Mutuos usando grafos
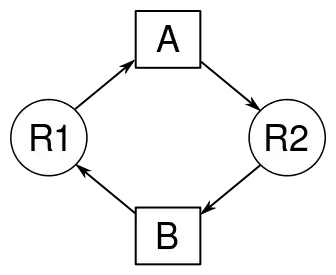
El Bloqueo mutuo también puede ser representado usando grafos dirigidos, donde el proceso es representado por un cuadrado y el recurso, por un círculo. Cuando un proceso solicita un recurso, una flecha es dirigida desde el proceso al recurso. En cambio, cuando un recurso está asignado a un proceso, una flecha es dirigida del recurso al proceso.[2]
En la figura del ejemplo, se pueden ver dos procesos diferentes (A y B), cada uno con un recurso diferente asignado (R1 y R2). En este ejemplo clásico de bloqueo mutuo, es fácilmente visible la condición de espera circular en la que los procesos se encuentran, donde cada uno solicita un recurso que está asignado a otro proceso.
Condiciones necesarias
También conocidas como condiciones de Coffman por su primera descripción en 1971 en un artículo escrito por E. G. Coffman.[3]
Estas condiciones deben cumplirse simultáneamente y no son totalmente independientes entre ellas.
Sean los procesos P0, P1, ..., Pn y los recursos R0, R1, ..., Rm:
- Condición de exclusión mutua: existencia de al menos un recurso compartido por los procesos, al cual solo puede acceder uno simultáneamente.
- Condición de retención y espera: al menos un proceso Pi ha adquirido un recurso Ri, y lo retiene mientras espera al menos un recurso Rj que ya ha sido asignado a otro proceso.
- Condición de no expropiación: los recursos no pueden ser expropiados por los procesos, es decir, los recursos solo podrán ser liberados voluntariamente por sus propietarios (el sistema operativo no puede quitarle un recurso al proceso).
- Condición de espera circular: dado el conjunto de procesos P0...Pm(subconjunto del total de procesos original),P0 está esperando un recurso adquirido por P1, que está esperando un recurso adquirido por P2,... ,que está esperando un recurso adquirido por Pm, que está esperando un recurso adquirido por P0. Esta condición implica la condición de retención y espera.
Un método para detectar dicho Bloqueo Mutuo es el Algoritmo de grafos de asignación de recursos.
Evitando bloqueos mutuos
Los bloqueos mutuos pueden ser evitados si se sabe cierta información sobre los procesos antes de la asignación de recursos. Para cada petición de recursos, el sistema controla si satisfaciendo el pedido entra en un estado inseguro, donde puede producirse un bloqueo mutuo. De esta forma, el sistema satisface los pedidos de recursos solamente si se asegura que quedará en un estado seguro. Para que el sistema sea capaz de decidir si el siguiente estado será seguro o inseguro, debe saber por adelantado y en cualquier momento el número y tipo de todos los recursos en existencia, disponibles y requeridos. Existen varios algoritmos para evitar bloqueos mutuos:
- Algoritmo del banquero, introducido por Dijkstra.
- Algoritmo de solicitud de recursos.
Prevención
Los bloqueos mutuos pueden prevenirse asegurando que no suceda alguna de las condiciones necesarias vistas anteriormente.
- Eliminando la exclusión mutua: ningún proceso puede tener acceso exclusivo a un recurso. Esto es imposible para procesos que no pueden ser encolados (puestos en un spool), e incluso con colas también pueden ocurrir interbloqueos.
- La condición de posesión y espera puede ser eliminada haciendo que los procesos pidan todos los recursos que van a necesitar antes de empezar. Este conocimiento por adelantado muchas veces es imposible nuevamente. Otra forma es requerir a los procesos liberar todos sus recursos antes de pedir todos los recursos que necesitan. Esto también es poco práctico en general.
- La condición de no expropiación puede ser también imposible de eliminar dado que un proceso debe poder tener un recurso por un cierto tiempo o el procesamiento puede quedar inconsistente.
- La condición de espera circular es la más fácil de atacar. Se le permite a un proceso poseer solo un recurso en un determinado momento, o una jerarquía puede ser impuesta de modo tal que los ciclos de espera no sean posibles.
Livelock
Un livelock es similar a un deadlock, excepto que el estado de los dos procesos envueltos en el livelock constantemente cambia con respecto al otro. Livelock es una forma de inanición y la definición general solo dice que un proceso específico no está procesando.
En un ejemplo del mundo real, un livelock ocurre por ejemplo cuando dos personas, al encontrarse en un pasillo angosto avanzando en sentidos opuestos, y cada una trata de ser amable moviéndose a un lado para dejar a la otra persona pasar, pero terminan moviéndose de lado a lado sin tener ningún progreso, pues ambos se mueven hacia el mismo lado, al mismo tiempo.
Livelock es un riesgo con algunos algoritmos que detectan y recuperan los interbloqueos, pues si más de uno toma cartas en el asunto, la detección del interbloqueo puede ser disparada continuamente; pudiendo ser arreglado asegurándose que solo un proceso (escogido al azar o por prioridad) tome acción.
Referencias
- Coulouris, George (2012). Distributed Systems Concepts and Design (en inglés). Pearson. p. 716. ISBN 978-0-273-76059-7.
- Stallings, William. «6». Operating Systems: Internals and Design Principles.
- Coffman, Edward G., Jr.; Elphick, Michael J.; Shoshani, Arie. «"System Deadlocks» (en inglés). Consultado el 28 de noviembre de 2016.
| Control de autoridades |
|
|---|
 Datos: Q623276
Datos: Q623276