Interfaz cerebro-computadora
Las interfaces cerebro-computadora (ICC), también conocidas como interfaces cerebro-máquina (ICM), interfaces cerebro-ordenador (ICO), interfaces neuronales directas (IND) o sencillamente como tecnología BCI por las siglas del término en inglés Brain–Computer Interfaces,[1] constituyen una tecnología que se basa en la adquisición de información neural (por ejemplo datos de electrofisiología nerviosa o registros de ondas cerebrales) para su procesamiento e interpretación a través de un ordenador.
Establecen un nuevo camino para interactuar con tecnología mediante nuestro pensamiento, ya que estas interfaces permiten transformarlo en acciones reales en nuestro entorno.[cita requerida]
.svg.png.webp)
Introducción
.jpg.webp)
Esta tecnología ha atraído a muchos investigadores durante la última década con el motivo de desarrollar una interfaz cerebro-ordenador eficiente, robusta y fiable, lo cual ha supuesto que cada uno de los diferentes grupos de investigación creara su propio "modus operandi" respecto a la tecnología de sus dispositivos. A pesar de las diferencias entre los diferentes dispositivos todos siguen el mismo principio de funcionamiento básico: la medición de la actividad cerebral mediante sensores, procesado de la señal adquirida para obtener sus características de interés y, por último, interaccionar con el entorno de la forma deseada por el usuario.
Las principales ventajas de esta tecnología son, por una parte instaurar un canal natural de interacción entre el hombre y la máquina el cual puede aprovechar información motora, cognitiva y emocional humana obtenida directamente del cerebro.
Historia
El origen de las tecnologías BCI nació con el descubrimiento de la naturaleza eléctrica del cerebro. El científico Richard Caton en 1875 usó un galvanómetro para observar impulsos eléctricos en la superficie del cerebro vivo de algunos animales.
Años más tarde, Hans Berger dio continuidad al trabajo de Caton y consiguió registrar la actividad cerebral mediante la electroencefalografía siendo en 1924 el primero en registrar un EEG de un cerebro humano. Mediante análisis de EEG, Berger consiguió clasificar las diferentes ondas cerebrales, por ello las ondas Alfa (8-12 Hz) también se denominan ondas Berger.
Hubo que esperar hasta 1970 para que se iniciara la investigación de los primeros dispositivos BCI en la Universidad de California, Los Ángeles (UCLA) con una beca de la Fundación Nacional de Ciencia seguida por un contrato de DARPA (Defense Advanced Research Projects Agency, Agencia de Proyectos de Investigación Avanzados de Defensa). El campo de investigación BCI se ha centrado principalmente en fines médicos, como la implantación de prótesis neuronales para poder recuperar la audición, vista o movilidad dañadas en un individuo. Las primeras prótesis desarrolladas fueron en 1990.
En la primera década del siglo XXI la investigación además de en fines médicos, se centró también en la industria de los videojuegos y se introdujeron en el mercado las primeras interfaces cerebro ordenador no invasivas.
Métodos de adquisición

Las interfaces cerebro-ordenador miden la actividad de las neuronas para obtener la señal que luego se procesará. Se diferencian dos tipos de dispositivos según el método de obtención de la señal:
- Dispositivos invasivos: La medición se realiza directamente desde el cerebro del usuario, con lo que es necesario realizar una intervención quirúrgica. El sensor puede penetrar la corteza cerebral de forma que mide la actividad eléctrica de neuronas individuales, o bien, puede colocarse en la superficie del córtex para medir la actividad eléctrica de grupos de neuronas. La señal obtenida es muy nítida como consecuencia de tomar las medidas directamente desde el cerebro aunque debido a los riesgos que supone la intervención y también a consideraciones éticas, la mayor parte de las investigaciones con aplicaciones en rehabilitación se realizan con animales. Miguel Nicolelis de la Universidad Duke, John Donoghue de la Universidad Brown, Andrew Schwartz de la Universidad de Pittsburgh y Richard Andersen en el Instituto de Tecnología de California han utilizado con éxito señales registradas de la población de neuronas para conducir la interfaz cerebro-computadora.
- Dispositivos no invasivos: El sensor se coloca de manera que no se realiza una intrusión sobre el cuerpo humano. Son los dispositivos más utilizados en la tecnología BCI y claramente con menos riesgos para el usuario que en los métodos invasivos debido a que no es necesario realizar ninguna intervención quirúrgica. La actividad eléctrica se mide en la superficie del cuero cabelludo (electroencefalografía EEG). La señal obtenida es la superposición de todas las neuronas del cerebro (no de neuronas individuales o grupos localizados) y tiene una resolución más pobre debido a que el cráneo del usuario debilita y distorsiona las señales generadas por las neuronas.
A pesar de que la primera y más popular técnica debido a su simplicidad y coste sea la electroencefalografía (EEG), existen otras técnicas no invasivas como la magnetoencefalografía MEG, la tomografía por emisión de positrones (PET), la imagen por resonancia magnética funcional (fMRI) y la imagen óptica cercana al infrarrojo (fNRI). Aunque estas últimas son técnicas muy caras y requieren una gran preparación técnica.
Modelo funcional genérico
En este apartado se describe el principio de funcionamiento básico de las interfaces cerebro-ordenador, según se describe en el blog La Cofa.[2] Se diferencian cuatro bloques principales:
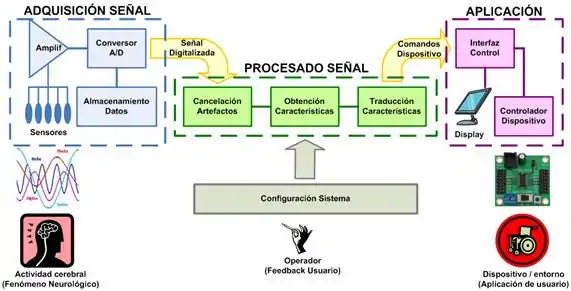
- Adquisición de la señal. Bloque donde se adquiere la señal, se amplifica y se le realiza la conversión A/D. Normalmente los sistemas BCI trabajan a tiempo real, pero opcionalmente también se incluye la posibilidad de registrar la señal obtenida para un estudio posterior de ésta.
- Procesado de la señal. En ese bloque se extraen las características de interés de la señal digitalizada para que el dispositivo sobre el que el usuario está actuando sea capaz de interpretar sus órdenes. En este bloque se distinguen 3 etapas:
- Cancelación de artefactos. Aquí se eliminan los ruidos que provienen de otras actividades bioeléctricas como los movimientos musculares (estas actividades se denominan artefactos) que distorsionan la señal. Algunos dispositivos consideran de utilidad las señales de los artefactos y no incluyen esta etapa.
- Obtención de características. Se traduce la señal de entrada en un vector de características en relación con el fenómeno neurológico asociado a la señal.
- Traducción de características (decodificación), donde se transforma el vector de características a una señal de control adecuada para el dispositivo que se quiere controlar.
- Aplicación. Es el bloque en el que se recibe la señal de control y realiza las acciones correspondientes en el dispositivo a través del controlador del mismo.
- Configuración. Se permite al usuario definir los parámetros del sistema.
La señal obtenida es de naturaleza limitada, da instrucciones del tipo «sí/no» o «mueve arriba/abajo» adecuadas al dispositivo.
Aplicaciones
Hay muchos tipos de aplicaciones de estas tecnologías que abarcan desde el ámbito médico hasta el más lúdico.[1] Más en concreto pueden encontrarse en el ámbito de la rehabilitación o sustitución motora.[3]
Ámbito médico
Una de las áreas de investigación más destacable en la tecnología BCI es la de generar aplicaciones para personas con discapacidad. Estas tecnologías (basadas en técnicas no invasivas) permiten por ejemplo desde controlar el movimiento de una silla de ruedas o un robot inalámbrico hasta controlar diferentes dispositivos electrónicos presentes en cualquier vivienda. Por otra parte, las técnicas invasivas permiten el implante de neuroprótesis con las que el usuario puede realizar por ejemplo el movimiento de un brazo robot con un mejor funcionamiento que en las técnicas no invasivas.
También las tecnologías BCI permiten la rehabilitación de personas con desórdenes neurológicos como la epilepsia, el trastorno por déficit de atención o hiperactividad o la comunicación con personas con parálisis cerebral.[4]
También pueden encontrarse en el ámbito de la rehabilitación o sustitución motora orientadas a pacientes de ictus o de lesión medular.[3][5][6][7]
Videojuegos y ocio[8]
Un ejemplo sencillo de un dispositivo BCI en este ámbito es Mindball. Este dispositivo permite el movimiento de una pelota por un tablero y lo hace mediante la detección de relajación del usuario.
Una segunda aplicación en este ámbito es el del movimiento de un avatar en un entorno virtual donde las señales cerebrales pueden decidir si el avatar avanza o retrocede, gira a la derecha o a la izquierda, entre otras órdenes básicas como en el caso de Second Life.
Otro tipo de interfaz, además de interpretar acciones básicas, también se basan en el estado emocional de usuario, siendo capaces de reconocer la excitación, tensión, aburrimiento, meditación, frustración, inmersión como es el caso del dispositivo Emotiv EPOC.
Véase también
Enlaces externos
Referencias
- http://webdiis.unizar.es/~jminguez/Sesion001_UJI.pdf
- «Copia archivada». Archivado desde el original el 25 de septiembre de 2011. Consultado el 9 de diciembre de 2011.
- Mínguez Zafra, Javier (2012). «Interfaces Cerebro‐Computador no Invasivos y Robótica para Sustitución Motora». Real Academia Nacional de Medicina.
- http://eprints.ucm.es/9660/
- «Conferencia «Donde confluyen la neurorehabilitación y la neurotecnología» Profesor Javier Mínguez en la Real Academia Nacional de Medicina, 2011».
- Paulucci Mûller, Pedro; Tabernig, Carolina Beatriz; Carrere, Lucia Carolina; Tornero Arnaudo, Walter Joel; Atum, Yanina Verónica; Stahringer, Germán Luis (2019). Software de animación virtual comandado por una interfaz cerebro-computadora para rehabilitación cognitiva. Facultad de Ingeniería. UNER. Consultado el 8 de marzo de 2023.
- Carrere, Lucía Carolina; Tabernig, Carolina; Gentiletti, Gerardo G. Sistema de rehabilitación con realimentación visual basado en BCI por imaginería motora. Consultado el 8 de marzo de 2023.
- «Copia archivada». Archivado desde el original el 24 de septiembre de 2011. Consultado el 9 de diciembre de 2011.
 Datos: Q897410
Datos: Q897410 Multimedia: Brain-computer interfaces / Q897410
Multimedia: Brain-computer interfaces / Q897410