Navcam
La Navcam (navigational camera) es un tipo de cámara fotográfica utilizada en ciertos vehículos rover o naves espaciales y que se utiliza para navegar sin interferir con los instrumentos científicos. [1][2][3] Las Navcams suelen tomar fotografías de gran angular que se utilizan para planificar los próximos movimientos del vehículo o el seguimiento de objetos.
Visión general
El rover Curiosity de Marte tiene dos pares de cámaras de navegación en blanco y negro montadas en el mástil para apoyar la navegación en tierra. Las cámaras tienen un ángulo de visión de 45° y utilizan luz visible para capturar imágenes estereoscópicas en 3D. [4] Estas cámaras, al igual que las de las misiones Mars Pathfinder, admiten el uso del formato de compresión de imágenes ICER.
La nave Rosetta de la Agencia Espacial Europea utilizó una única cámara con un campo de visión de 5º y una resolución de 1024x1024px de 12 bits, lo que permitió el seguimiento visual en cada una de las aproximaciones de la nave a los asteroides y finalmente al cometa.
Galería
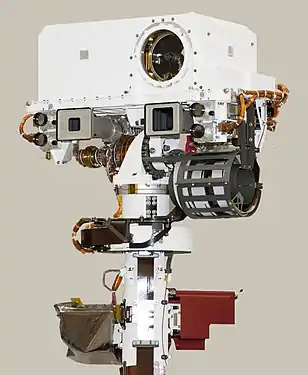
 Mástil del Mars Exploration Rover con dos pancams (en sus laterales) y dos navcams.
Mástil del Mars Exploration Rover con dos pancams (en sus laterales) y dos navcams. Ejemplo de foto realizada por la navcam del Opportunity.
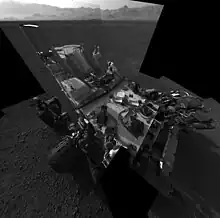
Ejemplo de foto realizada por la navcam del Opportunity.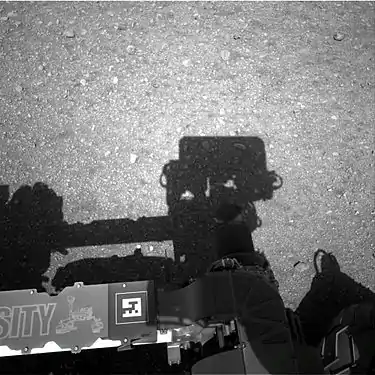 Primera foto tomada por la navcam del Curiosity.
Primera foto tomada por la navcam del Curiosity.
Véase también
- Astrionics
- Hazcam
- Pancam
- Lista de cámaras de NASA encima aeronave
- Marte rover
Referencias
- «Comet 67P/C-G in Rosetta’s navigation camera». ESA. Consultado el 15 de agosto de 2015.
- «The rover's "eyes" and other "senses"». Mars Exploration Rover Mission. NASA Jet Propulsion Laboratory. Archivado desde el original el 7 de marzo de 2004. Consultado el 3 de enero de 2013.
- «How A Team Of Scientists Dropped A One-Ton Science Lab On Mars Completely Unscathed». The Business Insider. 17 de diciembre de 2012.
- First NavCam mosaic
| Control de autoridades |
|
|---|
 Datos: Q6982202
Datos: Q6982202 Multimedia: Navigational cameras (NavCams) on spacecraft / Q6982202
Multimedia: Navigational cameras (NavCams) on spacecraft / Q6982202