Navegación por estima
La navegación por estima es la navegación y ubicación de un vehículo (barco, avión u otros) por medios analíticos, teniendo en cuenta la situación inicial, su rumbo y su velocidad. Se utiliza en los siguientes ámbitos:
La navegación por estima está sujeta a errores acumulativos. Los avances en las ayudas a la navegación que brindan información precisa sobre la posición, en particular la navegación por satélite utilizando el Sistema de Posicionamiento Global, han hecho que la navegación por estima sea obsoleta para la mayoría de los propósitos. Sin embargo, los sistemas de navegación inercial, que proporcionan información direccional muy precisa, utilizan la navegación oor estima y se aplican muy ampliamente.
Cálculo de la estimación
Si es la distancia recorrida en la ruta ; y las coordenadas geográficas del punto de salida y llegada son:




- y
- con



Esta fórmula aproximada sigue siendo precisa dentro de millas náuticas.

Las calculadoras de estimación[1] dan directamente las rutas en minutos de latitud (indicador NS) y longitud (indicador EO). Las adiciones algebraicas simples permiten, por tanto, el cálculo del punto.
En el pasado, estos laboriosos cálculos se realizaban mediante una “tabla de puntos” (en Francia, tabla 900 o tabla de Friocourt). También requerían anotar cuidadosamente en el registro de navegación los cambios de rumbo y velocidad. La corriente fue tratada como una carrera extra.
En la época de la navegación a vela, los hombres de guardia utilizaban un zorro, un auxiliar de memoria hecho de una tabla generalmente perforada (los marineros eran en su mayoría analfabetos) y donde colocaban tarjetas para anotar los recorridos y velocidades, diferentes. observaciones, que luego fueron utilizadas por el navegante para realizar la estimación.
Hoy, con la llegada de los sistemas de navegación por satélite, este método ha perdido su interés. Sin embargo, es un medio autónomo. Es por ello que se recomienda (y obligatorio en el caso de las armadas profesionales) mantener los datos que permitan ser apreciados incluso cuando se disponga de otros medios de posicionamiento.
Errores
.
Si bien la navegación por estima puede brindar la mejor información disponible sobre el puesto actual con poca matemática o análisis, está sujeta a errores de aproximación significativos. Para obtener información de posición precisa, tanto la velocidad como la dirección deben conocerse con precisión en todo momento durante el viaje. En particular, la navegación por estima no tiene en cuenta la deriva direccional durante el viaje a través de un medio fluido. Estos errores tienden a agravarse en distancias mayores, lo que hace que la navegación por estima sea un método de navegación difícil para viajes más largos.
Por ejemplo, si el desplazamiento se mide por el número de rotaciones de una rueda, cualquier discrepancia entre la distancia recorrida real y supuesta por rotación, debido quizás al deslizamiento o irregularidades de la superficie, será una fuente de error. Como cada estimación de posición es relativa a la anterior, los errores son acumulativos o compuestos a lo largo del tiempo.
La precisión de la navegación por estima se puede aumentar significativamente mediante el uso de otros métodos más confiables para obtener una nueva solución a mitad del viaje. Por ejemplo, si uno estaba navegando en tierra con poca visibilidad, entonces se podría utilizar la navegación a estima para acercarse lo suficiente a la posición conocida de un punto de referencia para poder verlo, antes de caminar hasta el punto de referencia en sí, lo que proporciona un punto de inicio conocido con precisión, y luego partimos de nuevo.
Localización de nodos sensores móviles
Localizar un nodo sensor estático no es una tarea difícil porque conectar un dispositivo GPS basta para la necesidad de localización. Pero un nodo sensor móvil, que cambia continuamente su ubicación geográfica con el tiempo, es difícil de localizar. Se pueden usar principalmente nodos sensores móviles dentro de algún dominio particular para la recopilación de datos, es decir, nodo sensor adjunto a un animal dentro de un campo de pastoreo o adjunto a un soldado en un campo de batalla. En estos escenarios, no se puede permitir un dispositivo GPS para cada nodo sensor. Algunas de las razones de esto incluyen el costo, el tamaño y el consumo de batería de los nodos sensores restringidos. Para superar este problema, se emplea un número limitado de nodos de referencia (con GPS) dentro de un campo. Estos nodos transmiten continuamente sus ubicaciones y otros nodos en las proximidades reciben estas ubicaciones y calculan su posición utilizando alguna técnica matemática como la trilateración. Para la localización, se necesitan al menos tres ubicaciones de referencia conocidas para localizar.
En la literatura se han propuesto varios algoritmos de localización basados en el método Sequential Monte Carlo (SMC).[2][3] A veces, un nodo en algunos lugares recibe solo dos ubicaciones conocidas y, por lo tanto, se vuelve imposible de localizar. Para superar este problema, se utiliza la técnica de navegación por estima. Con esta técnica, un nodo sensor utiliza su ubicación calculada previamente para la localización en intervalos de tiempo posteriores.[4] Por ejemplo, en el instante 1 si el nodo A calcula su posición como loca_1 con la ayuda de tres ubicaciones de referencia conocidas; luego, en el instante de tiempo 2, usa loca_1 junto con otras dos ubicaciones de referencia recibidas de otros dos nodos de referencia. Esto no solo localiza un nodo en menos tiempo, sino que también se localiza en posiciones donde es difícil obtener tres ubicaciones de referencia.[5]
Navegación animal
En los estudios de navegación animal, la navegación por estima se conoce más comúnmente (aunque no exclusivamente) como integración de ruta. Los animales lo usan para estimar su ubicación actual en función de sus movimientos desde su última ubicación conocida. Se ha demostrado que animales como hormigas, roedores y gansos rastrean sus ubicaciones continuamente en relación con un punto de partida y regresan a él, una habilidad importante para los recolectores con un hogar fijo.[6][7]
Navegación vehicular
Marina

En la navegación marítima, un gráfico de cálculo "muerto" generalmente no tiene en cuenta el efecto de las corrientes o el viento. A bordo del barco, un gráfico de navegación a estima se considera importante para evaluar la información de posición y planificar el movimiento del barco.[8]
La navegación a estima comienza con una posición conocida, o fijación, que luego avanza, matemáticamente o directamente en la carta, por medio del rumbo, la velocidad y el tiempo registrados. La velocidad se puede determinar por muchos métodos. Antes de la instrumentación moderna, se determinaba a bordo del barco usando una corredera. Los métodos más modernos incluyen el registro de pitómetro referenciando la velocidad del motor (por ejemplo, en rpm) contra una tabla de desplazamiento total (para barcos) o haciendo referencia a la velocidad aerodinámica indicada alimentada por la presión de un tubo de Pitot. Esta medida se convierte en una velocidad aerodinámica equivalente basada en condiciones atmosféricas conocidas y errores medidos en el sistema de velocidad aerodinámica indicado. Un buque de guerra utiliza un dispositivo llamado espada de pozo (medidor de varilla), que utiliza dos sensores en una varilla de metal para medir la variación electromagnética causada por el movimiento del barco a través del agua. Este cambio se convierte luego en la velocidad del barco. La distancia se determina multiplicando la velocidad por el tiempo. Esta posición inicial se puede ajustar dando como resultado una posición estimada teniendo en cuenta la corriente (conocido como arrumbar en la navegación marítima). Si no hay información de posición disponible, un nuevo gráfico de navegación a estima puede comenzar desde una posición estimada. En este caso, las posiciones posteriores de navegación a estima habrán tenido en cuenta la deriva y el set estimados.
Las posiciones de navegación a estima se calculan a intervalos predeterminados y se mantienen entre arreglos. La duración del intervalo varía. Los factores que incluyen la velocidad correcta y la naturaleza del rumbo y otros cambios de rumbo, y el juicio del navegante, determinan cuándo se calculan las posiciones de navegación a estima.
Antes del desarrollo en el siglo XVIII del cronómetro marino por John Harrison y la distancia lunar, la navegación a estima era el método principal para determinar la longitud disponible para marineros como Cristóbal Colón y Juan Caboto en sus viajes transatlánticos. Se desarrollaron herramientas como el tablero transversal para permitir que incluso los miembros analfabetos de la tripulación recopilaran los datos necesarios para la navegación a estima. La navegación polinesia, sin embargo, utiliza diferentes técnicas de wayfinding.
Aérea

El 21 de mayo de 1927 Charles Lindbergh aterrizó en París, después de un exitoso vuelo sin escalas desde los Estados Unidos en el avión monomotor Spirit of St. Louis. Como el avión estaba equipado con instrumentos muy básicos, Lindbergh utilizó la navegación a estima para navegar.
La navegación a estima en el aire es similar a la navegación a estima en el mar, pero un poco más complicada. La densidad del aire por el que se mueve la aeronave afecta su rendimiento, así como los ajustes de viento, peso y potencia.
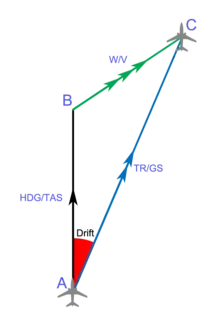
La fórmula básica para DR es Distancia = Velocidad x Tiempo. Un avión que vuela a 250 nudos de velocidad durante 2 horas ha recorrido 500 millas náuticas por el aire. El triángulo de viento se utiliza para calcular los efectos del viento en el rumbo y la velocidad del aire para obtener un rumbo magnético para gobernar y la velocidad sobre el suelo (velocidad respecto al suelo). Se utilizan tablas impresas, fórmulas o un ordenador de vuelo E6B para calcular los efectos de la densidad del aire en la tasa de ascenso de la aeronave, la tasa de consumo de combustible y la velocidad aerodinámica.[9]
Se dibuja una línea de rumbo en la carta aeronáutica junto con posiciones estimadas a intervalos fijos (por ejemplo, cada ½ hora). Las observaciones visuales de las características del suelo se utilizan para obtener correcciones. Al comparar el punto fijo y la posición estimada, se realizan correcciones en el rumbo y la velocidad respecto al suelo de la aeronave.
La navegación a estima está en el plan de estudios de los pilotos VFR (reglas de vuelo visual o nivel básico) en todo el mundo.[10] Se enseña independientemente de si la aeronave tiene ayudas para la navegación como GPS, ADF y VOR y es un requisito de ICAO. Muchas escuelas de entrenamiento de vuelo evitarán que un estudiante use ayudas electrónicas hasta que haya dominado la navegación a estima.
Los sistemas de navegación inercial (INS), que son casi universales en aeronaves más avanzadas, utilizan la navegación a estima internamente. El INS proporciona una capacidad de navegación fiable en prácticamente cualquier condición, sin necesidad de referencias de navegación externas, aunque sigue siendo propenso a errores leves.
Automóviles
Hoy en día, la navegación a estima se implementa en algunos sistemas de navegación para automóviles de gama alta para superar las limitaciones de la tecnología GPS/GNSS por sí sola. Las señales de microondas satelitales no están disponibles en estacionamientos y túneles, y a menudo se degradan severamente en cañones urbanos y cerca de árboles debido a líneas de visión bloqueadas a los satélites o propagación de trayectos múltiples. En un sistema de navegación a estima, el automóvil está equipado con sensores que conocen la circunferencia de la rueda y registran las rotaciones de las ruedas y la dirección de la dirección. Estos sensores a menudo ya están presentes en los automóviles para otros fines (sistema de frenos antibloqueo, control electrónico de estabilidad) y pueden ser leídos por el sistema de navegación desde el bus de red de área del controlador. Luego, el sistema de navegación utiliza un filtro Kalman para integrar los datos del sensor siempre disponibles con la información de posición precisa pero ocasionalmente no disponible de los datos del satélite en una posición fija combinada.
Navegación autónoma en robótica
La navegación a estima se utiliza en algunas aplicaciones robóticas.[11] Por lo general, se utiliza para reducir la necesidad de tecnología de detección, como sensores ultrasónicos, GPS, o la colocación de algunos codificadores lineales y rotatorios, en un codificador autónomo robot, lo que reduce en gran medida el costo y la complejidad a expensas del rendimiento y la repetibilidad. La utilización adecuada de la navegación a estima en este sentido sería suministrar un porcentaje conocido de energía eléctrica o presión hidráulica a los motores de accionamiento del robot durante un período de tiempo determinado desde un punto de partida general. La navegación a estima no es totalmente precisa, lo que puede dar lugar a errores en las estimaciones de distancia que van desde unos pocos milímetros (en maquinado CNC) hasta kilómetros (en UAV), según la duración de la carrera, la velocidad del robot y varios otros factores.
Referencias
- Service hydrographique et océanographique de la marine, Guide du navigateur, volume 2, Service hydrographique et océanographique de la marine, 2012, 290 p. (ISBN 978-2-11-128328-2), p. 163-169; 201-206
- Hu, Lingxuan; Evans, David (1 de enero de 2004). «Localization for Mobile Sensor Networks». Proceedings of the 10th Annual International Conference on Mobile Computing and Networking. MobiCom '04 (New York, NY, USA: ACM). pp. 45-57. ISBN 978-1-58113-868-9. S2CID 705968. doi:10.1145/1023720.1023726.
- Mirebrahim, Hamid; Dehghan, Mehdi (22 de septiembre de 2009). Ruiz, Pedro M.; Garcia-Luna-Aceves, Jose Joaquin, eds. Monte Carlo Localization of Mobile Sensor Networks Using the Position Information of Neighbor Nodes. Lecture Notes in Computer Science. Springer Berlin Heidelberg. pp. 270-283. ISBN 978-3-642-04382-6. doi:10.1007/978-3-642-04383-3_20.
- Haroon Rashid, Ashok Kumar Turuk, 'Dead reckoning localisation technique for mobile wireless sensor networks', IET Wireless Sensor Systems, 2015, 5, (2), p. 87-96, DOI: 10.1049/iet-wss.2014.0043 IET Digital Library, http://digital-library.theiet.org/content/journals/10.1049/iet-wss.2014.0043
- Turuk, Haroon (2015). «IET Digital Library: Dead reckoning localisation technique for mobile wireless sensor networks». IET Wireless Sensor Systems 5 (2): 87-96. S2CID 14909590. arXiv:1504.06797. doi:10.1049/iet-wss.2014.0043.
- Gallistel. The Organization of Learning. 1990.
- Dead reckoning (path integration) requires the hippocampal formation: evidence from spontaneous exploration and spatial learning tasks in light (allothetic) and dark (idiothetic) tests, IQ Whishaw, DJ Hines, DG Wallace, Behavioural Brain Research 127 (2001) 49 – 69
- «Archived copy». Archivado desde el original el 13 de marzo de 2006. Consultado el 17 de febrero de 2010.
- «Transport Canada TP13014E Sample Private Pilot Examination». Transport Canada. Consultado el 8 de octubre de 2013.
- «ICAO Annex 1 Paragraph 2.3.4.2.1 h». ICAO. Archivado desde el original el 14 de enero de 2017. Consultado el 18 de octubre de 2016.
- Howie M. Choset; Seth Hutchinson; Kevin M. Lynch; George Kantor; Wolfram Burgard; Lydia E. Kavraki; Sebastian Thrun (2005). Principles of Robot Motion: Theory, Algorithms, and Implementation. MIT Press. pp. 285-. ISBN 978-0-262-03327-5.
| Control de autoridades |
|
|---|
 Datos: Q152255
Datos: Q152255