Sensor inductivo
Los sensores inductivos son una clase especial de sensores que sirve para detectar materiales ferrosos
.svg.png.webp)
1. Sensor de campo
2. Oscilador
3. Demodulador
4. Disparador Schmitt
5. Etapa de salida
Conceptos teóricos
Una corriente (i) que circula a través de un hilo conductor, genera un campo magnético que está asociado a ella.

Los sensores de proximidad inductivos contienen un devanado interno. Cuando una corriente circula por el mismo, un campo magnético es generado, que tiene la dirección de las flechas anaranjadas. Cuando un metal es acercado al campo magnético generado por el sensor de proximidad, este es detectado.

La bobina, o devanado, del sensor inductivo induce corrientes de Foucault en el material por detectar. Estas, a su vez, generan un campo magnético que se opone al de la bobina del sensor, causando una reducción en la inductancia de la misma. Esta reducción en la inductancia de la bobina interna del sensor trae aparejado una disminución en la impedancia de esta.
La inductancia es un valor intrínseco de las bobinas o inductores, que depende del diámetro de las espiras y el número de ellas. En sistemas de corriente alterna, la reactancia inductiva se opone al cambio del sentido de la corriente y se calcula de la siguiente manera:

Donde:
- Reactancia inductiva medida en ohms ()
- Número π
- Frecuencia del sistema medida en Hertz (Hz)
- Inductancia medida en Henrios (H)





El oscilador podrá generar nuevamente el campo magnético con su amplitud normal. Es en este momento en que el circuito detector nuevamente detecta este cambio de impedancia y envía una señal al amplificador de salida para que sea este quien, nuevamente, restituya el estado de la salida del sensor.
Si el sensor tiene una configuración “Normal Abierta”, este activará la salida cuando el metal a detectar ingrese en la zona de detección. Lo opuesto ocurre cuando el sensor tiene una configuración "Normal Cerrada". Estos cambios de estado son evaluados por unidades externas tales como: PLCs, relés, PCs, etc.
Constitución física
Estos bloques que habitualmente constituyen un sensor inductivo, en algunos modelos el amplificador de salida puede estar implementado en otro dispositivo con carcasa independiente, para reducir el tamaño del sensor.
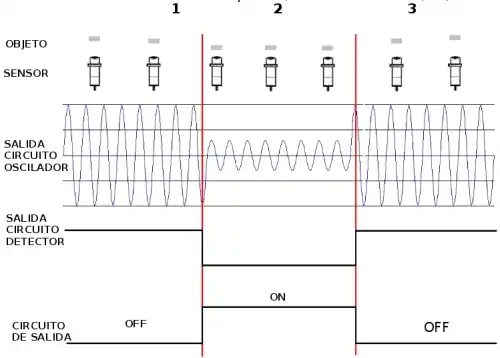
Estados de un sensor inductivo
En función de la distancia entre el sensor y el objeto, el primero mantendrá una señal de salida (ver figura inferior):
1.- Objeto a detectar ausente:
- amplitud de oscilación al máximo, sobre el nivel de operación;
- la salida se mantiene inactiva (OFF).
2.- Objeto a detectar acercándose a la zona de detección:
- se producen corrientes de Foucault, por tanto hay una “transferencia de energía”;
- el circuito de detección detecta una disminución de la amplitud, la cual cae por debajo del nivel de operación;
- la salida es activada (ON).
3.- Objeto a detectar se retira de la zona de detección:
- eliminación de corrientes de Foucault;
- el circuito de detección detecta el incremento de la amplitud de oscilación;
- como la salida alcanza el nivel de operación, la misma se desactiva (OFF).
- así es
Sensores blindados y no blindados
 |
 |
| Los blindados tienen un agregado al núcleo y un blindaje metálico que limita el campo magnético al frente del sensor. | Los no blindados no tienen blindaje extra, resultando en un área de censado mayor. |
|
Características:
|
Características:
|
Los sensores blindados, al tener todo el cuerpo roscado son más resistentes a los golpes que los no blindados y además permiten el enrasado si bien su zona de muestreo se limita al frontal del sensor.
Histéresis
Se denomina histéresis a la diferencia entre la distancia de activación y desactivación. Cuando un objeto metálico se acerca al sensor inductivo, este lo detecta a la "distancia de detección" o "distancia de sensado". Cuando el mismo objeto es alejado, el sensor no lo deja de detectar inmediatamente, sino cuando alcanza la "distancia de reset" o "distancia de restablecimiento", que es igual a la "distancia de detección" más la histéresis propia del sensor.
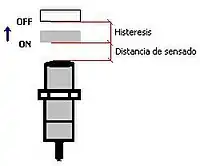
Distancia de sensado
La distancia de sensado (Sn) especificada en la hoja de datos de un sensor inductivo está basada en un objeto de estándar con medidas de 1" x 1" de hierro dulce. Este valor variará sensiblemente si se quiere detectar otros tipos de metales, incluso con materiales ferrosos como el acero inoxidable (SS). Para otros no ferroros, como el aluminio, pueden ser detectados, pero a menores distancias.
En el siguiente gráfico se puede ver como varía la distancia de detección en función del material a detectar y el tamaño del mismo.

Consideraciones generales
- La superficie del objeto a detectar no debe ser menor que el diámetro del sensor de proximidad (preferentemente 2 veces más grande que el tamaño o diámetro del sensor). Si fuera menor que el 50% del diámetro del sensor, la distancia de detección disminuye sustancialmente.
- Debido a las limitaciones de los campos magnéticos, los sensores inductivos tienen una distancia de detección pequeña comparados con otros tipos de sensores. Esta distancia puede variar, en función del tipo de sensor inductivo, desde fracciones de milímetros hasta 40 mm en promedio.
- Para compensar el limitado rango de detección, existe una extensa variedad de formatos de sensores inductivos: cilíndricos, chatos, rectangulares, etc.
- Los sensores inductivos cilíndricos son los más usuales en las aplicaciones presentes en la industria.
- Posibilidad de montar los sensores tanto enrasados como no enrasados.
- Gracias a no poseer partes móviles los sensores de proximidad no sufren en exceso el desgaste.
- Gracias a las especiales consideraciones en el diseño, y al grado de protección IP67, muchos sensores inductivos pueden trabajar en ambientes adversos, con fluidos corrosivos, aceites, etc., sin perder operatividad.
Terminología
Alcance nominal (Sn): Alcance convencional que sirve para designar el aparato. No tiene en cuenta las dispersiones (fabricación, temperatura, tensión).
Alcance real (Sr): El alcance real se mide con la tensión de alimentación asignada (Un) y a la temperatura ambiente asignada (Tn). Debe estar comprendida entre el 90% y el 110% del alcance nominal (Sn): 0,9Sn < Sr < 1,1Sn
Alcance útil (Su): El alcance útil se mide dentro de los límites admisibles de la temperatura ambiente (Ta) y de la tensión de la alimentación (Ub). Debe estar comprendida entre el 90% y el 110% del alcance real: 0,9Sr < Su < 1,1Sr
Alcance de trabajo (Sa): Es el campo de funcionamiento del aparato. Está comprendido entre el 0 y el 81% del alcance nominal (Sn): 0 < Sa < 0,9Sn
Normativa
4.2.6. Normativa
Las normas referentes a los tipos o grados de protección son:
NEMA
TIPO 1: Propósito general. Envolvente destinada a prevenir de contactos accidentales con los aparatos.
TIPO 2: Hermético a gotas. Previene contra contactos accidentales que pueden producirse por condensación de gotas o salpicaduras.
TIPO 3: Resistencia a la intemperie. Para instalación en el exterior.
TIPO 3R: Hermético a la lluvia.
TIPO 4: Hermético al agua. Protege contra chorro de agua.
TIPO 5: Hermético al polvo.
TIPO 6: Sumergible en condiciones especificadas de presión y tiempo.
TIPO 7: Para emplazamientos peligrosos Clase I. El circuito de ruptura de corriente actúa al aire.
TIPO 8: Para emplazamientos peligrosos Clase I. Los aparatos están sumergidos en aceite.
TIPO 9: Para emplazamientos peligroso Clase II y funcionamiento intermitente.
TIPO 10: A prueba de explosión.
TIPO 11: Resistente a ácidos o gases.
TIPO 12: Protección contra polvo, hilos, fibras, hojas, rebose de aceite sobrante o refrigerante.
TIPO 13: Protección contra polvo. Protege de contactos accidentales y de que su operación normal no se interfiera por la entrada de polvo
DIN
La norma DIN 40 050 establece el grado de protección IP; este se compone de dos dígitos:
El primero indica la protección contra sólidos.
El segundo indica la protección contra el agua.
| Cuerpos sólidos | Agua |
| 0 No está protegido contra el ingreso de cuerpos extraños. | 0 Sin protección. |
| 1 Protegido contra ingreso de cuerpos extraños de hasta 50 mm de diámetro. | 1 Protección contra el goteo de agua condensada. |
| 2 Protegido contra ingreso de cuerpos extraños de hasta 12 mm de diámetro. | 2 Protección contra el goteo hasta 15° de la vertical. |
| 3 Protegido contra ingreso de cuerpos extraños de hasta 2.5 mm de diámetro. | 3 Protección contra lluvia con ángulo inferior a 60°. |
| 4 Protegido contra ingreso de cuerpos extraños de hasta 1 mm de diámetro. | 4 Protección contra salpicaduras en cualquier dirección. |
| 5 Protección contra depósito de polvo. | 5 Protección contra el chorreo de agua en cualquier dirección. |
| 6 Protección contra ingreso de polvo. | 6 Protección contra ambientes propios de las cubiertas de los barcos. |
| 7 Protección contra la inmersión temporal. | |
| 8 Protección contra la inmersión indefinida. |
Sensores inmunizados
Debido al principio por el cual el sensor detecta a los elementos metálicos, los campos magnéticos, la presencia de campos magnéticos externos pueden provocar falsas detecciones o no detecciones, para evitarlo existen sensores inductivos con inmunidad a campos magnéticos variables, como los generados por máquinas de soldar que utilizan grandes flujos de corriente eléctrica.
Estos sensores están principalmente fabricados sin núcleo de material ferromagnético, es decir el núcleo es de aire, a su vez, normalmente, están compuesto por dos bobinas en tándem o perpendiculares para trabajar con un diferencial eléctrico y no con el factor de calidad Q propio del sensor.
Véase también
- Corrientes de Foucault
- Sensor resistivo
- Instrumentación electrónica
- Condensador variable
| Control de autoridades |
|
|---|
 Datos: Q765821
Datos: Q765821