Sistema quirúrgico Da Vinci
El Sistema Quirúrgico Da Vinci es un equipo de cirugía robótica, al cual es necesario realizar estudios más acabados con respecto de las habilidades médicas en su uso práctico, sobre todo, por su impacto en la vida de mujeres en intervenciones de histerectomía vaginal.[1]
Este dispositivo desarrollado por la empresa norteamericana Intuitive Surgical y aprobado, en el año 2000, por la Administración de Alimentos y Medicamentos (FDA) de los Estados Unidos, el Sistema da Vinci –que se utiliza para múltiples procedimientos quirúrgicos, especialmente en prostatectomías-, está controlado por un cirujano que opera desde una consola y se diseñó para facilitar la cirugía compleja empleando un enfoque mínimamente invasivo. Este factor permite superar las limitaciones propias de la cirugía abierta y laparoscópica, potenciando en términos de visión, precisión y control las habilidades del cirujano. El robot da Vinci no es autónomo; requiere en todos los casos la intervención y toma de decisiones de un profesional que actúe como operador humano para todas las acciones.
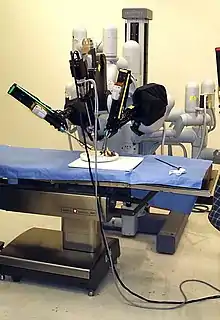
El robot quirúrgico Da Vinci se compone de una consola ergonómica desde la que el cirujano opera sentado y que, normalmente, se encuentra en el mismo quirófano. Al lado del paciente se sitúa la torre de visión (formada por controladores, vídeo, audio y proceso de imagen) y el carro quirúrgico que incorpora tres o cuatro brazos robóticos interactivos controlados desde la consola, en el extremo de los cuales se encuentran acopladas las distintas herramientas que el médico necesita para operar, tales como bisturís, tijeras, unipolar, etc.
El robot da Vinci permite optimizar el rango de acción de la mano humana, reduciendo el posible temblor y perfeccionando todos los movimientos del cirujano. De esta manera, se minimizan las posibilidades de error en relación con otros sistemas quirúrgicos como la laparoscopia, procedimiento en el que el cirujano debe operar de pie con una visión del área anatómica en la que interviene en 2D. En contraposición, el da Vinci ofrece una visión tridimensional de la zona intervenida. Por otro lado, en la laparoscopia, el médico depende de un ayudante para posicionar la cámara correctamente, mientras que en el da Vinci, el cirujano gestiona la cámara de forma totalmente autónoma. También es importante subrayar que el instrumental de la laparoscopia ofrece unos índices de versatilidad limitados mientras que los instrumentos del da Vinci pueden operar de igual forma a cómo lo haría una muñeca humana, lo que permite realizar movimientos altamente precisos en espacios muy reducidos.
Otro valor añadido de gran relevancia que ofrece el robot da Vinci al profesional es la posibilidad de poder contar con una visión superior en 3D, alineada entre la zona anatómica afectada y el instrumental, una posición única desde la que se puede trabajar de forma cómoda, intuitiva y precisa.
Los robots da Vinci operan en centros hospitalarios públicos y privados de todo el mundo, con un estimado de 300.000 cirugías realizadas en 2013, con mayor frecuencia para las histerectomías y la absorción de la próstata. En febrero de 2014 se encuentran operativas en el mundo casi 3.000 unidades, la mayoría de ellas (2.082) en los Estados Unidos de América.
Características del sistema
El sistema consiste en:
- La consola ergonómica del cirujano.
- Carro quirúrgico.
- Torre de visión.
La consola ergonómica del cirujano
Es el centro de mando del sistema Da Vinci. El cirujano se sienta fuera del campo estéril, en la consola del cirujano, y maneja un endoscopio en 3D y los instrumentos EndoWrist® con los ojos, las manos y los pies mediante dos controladores principales y pedales. El sistema interpreta los movimientos del cirujano y los traduce a escala con movimientos precisos de los instrumentos.
El carro quirúrgico
Es el componente quirúrgico del sistema Da Vinci, y su función principal es sostener los brazos para instrumentos y el brazo para la cámara. El sistema Da Vinci, utiliza la tecnología de centro de control. El centro de control es un punto fijo alrededor del cual se mueven los brazos del carro del paciente. La tecnología de centro de control, permite que el sistema manipule los instrumentos y el endoscopio en la zona de la operación, ejerciendo la mínima presión en la pared del cuerpo del paciente. El usuario del carro del paciente trabaja en el área estéril, ayudando al usuario de la consola del cirujano con el intercambio de instrumentos y endoscopios, y con otras tareas en la zona del paciente. Para garantizar la seguridad del paciente, las acciones del carro del paciente tienen prioridad sobre las acciones de la consola del cirujano.
Torre de visión
Aloja el equipo de visualización de procesamiento central del sistema. Posee estantes regulables para incorporar instrumentos quirúrgicos auxiliares opcionales, como unidades electroquirúrgicas (ESU) e insufladores. Durante la operación lo maneja una persona no estéril.
Instrumentos y las 'Nuevas Tecnologías'
Los instrumentos EndoWrist® están diseñados para permitir a los cirujanos mantener su destreza natural, y proporcionarles además un mayor rango de movimiento que el que posee la mano humana. Están diseñados para trabajar con las suturas, disecciones y técnicas de manipulación de tejidos más rápidas y precisas que existen. Son instrumentos de uso múltiple, disponibles en diámetros de 8 mm y 5 mm.
- Las 'Nuevas Tecnologías'
La última versión del da Vinci permite la incorporación de una serie de recursos técnicos o ‘nuevas tecnologías’ que permiten mejorar la eficiencia de la acción del cirujano. Son las siguientes:
- Single Site: Permite al cirujano operar desde un solo corte en el cuerpo del paciente. Esta técnica resulta cómoda para el médico durante la intervención y reduce totalmente las secuelas estéticas de la operación en el paciente.
- Sellador de vasos (‘Vessel Seller’): Sella y corta vasos sanguíneos de hasta 7 milímetros de diámetro. Se trata de una herramienta articulada que ofrece un óptimo rendimiento en vasos grandes como, por ejemplo, los del colon.
- Endograpadora: La endograpadora que puede incorporar el da Vinci moderno puede ser utilizada por el propio cirujano desde la consola mientras que, en los modelos anteriores del robot, debía ser utilizada por el ayudante del cirujano desde la mesa de operaciones. Permite al cirujano un mayor control de los procesos quirúrgicos.
- Florescencia: Permite la identificación vascular con el método de la florescencia, una técnica que incrementa muy notablemente la seguridad en la intervención. Es especialmente útil en las operaciones de extirpación tumoral (garantiza la extracción total de la zona afectada) y en operaciones de riñón, permitiendo operar este órgano sin cortarle el riego sanguíneo.
- Simulador: Permite a los cirujanos mejorar sus habilidades en el Sistema da Vinci sin necesidad de operar en humanos o animales a través de un software de entrenamiento.
- Red da Vinci.
Origen del nombre
El fabricante dice que recibe el nombre de Da Vinci como homenaje a Leonardo da Vinci quien construyó el primer robot. El artista Leonardo también usó una forma anatómica y detalles tridimensionales para darle vida a su trabajo.[2]
Versiones de la máquina
Existen seis versiones del robot Da Vinci: Estándar (que se dejó de comercializar en el 2007), ‘S’ (cuya comercialización se inició en el 2006), 'S-i’ (que se empezó a vender en 2011 y permite la incorporación de las denominadas ‘nuevas tecnologías’), 'Xi' (se empezó a vender en 2014), X (aprobado en abril de 2017 para la Unión Europea) y la versión SP recientemente lanzada y aprobada.
El ‘Xi’ y sus prestaciones el sistema Da Vinci Xi combina la funcionalidad de un sistema de brazos quirúrgicos suspendidos con la flexibilidad de una plataforma móvil. Esta arquitectura híbrida permite la colocación del carro quirúrgico en cualquier posición alrededor del paciente y, a la vez, posibilita el acceso por cuatro cuadrantes anatómicos.
El robot Da Vinci ‘Xi’ ofrece al cirujano una Estereoscopía ‘real’ del área en la que está operando gracias al endoscopio con doble óptica que incorpora el robot, el doble procesamiento de imagen, doble monitor en la consola, zum de 10 aumentos (inmersión en el campo quirúrgico) y alta definición (opcional) con zum digital. Esta tecnología le permite al cirujano movimientos intuitivos y el alineamiento del eje visual y motor, además de la correspondencia de movimientos entre los controles y la pincería.
Su principal aportación es una pantalla de visualización que proporciona una imagen optimizada con un cuadrante en el área en el que se realiza la intervención. Además ofrece una colocación de puertos flexible y una óptica digital 3D de última generación, lo que permite observar al paciente a la vez que se controla el dispositivo. Los brazos son más finos que los de sus predecesores, lo que permite una mayor movilidad en el momento de la intervención. El robot Da Vinci® Xi incluye, además, sistemas de guía por voz y láser y también un endoscopio ligero.[3]
La última versión SP (single port) incluye tres instrumentos multi-articulados y la cámara 3D HD, que utiliza un solo puerto.
Diseño
Para ejecutar un procedimiento, el cirujano usa los controles maestros de la consola del cirujano para maniobrar cuatro brazos robóticos que aseguran los instrumentos y una cámara endoscópica de alta definición. El diseño en forma de muñeca de los instrumentos excede el rango natural de movimiento de un humano. El movimiento a escala y reducción del temblor mejora y refina el movimiento de la mano del cirujano. El sistema Da Vinci incorpora múltiples y redundantes características de seguridad diseñadas para minimizar los errores humanos comparados con los métodos tradicionales. En la actualidad el robot opera en la metodología "maestro-esclavo", el cirujano viene siendo el maestro y el robot el esclavo.
El sistema fue diseñado para mejorar la laparoscopia tradicional, en donde el cirujano de pie, usa instrumentos manuales, de formas incómodas y rústicas, y debe ver mediante un monitor 2D la imagen del cuerpo.
Con este sistema esas funciones son automatizadas, el cirujano permanece sentado con los ojos y manos posicionados sobre los instrumentos y para moverlos o reposicionar la cámara simplemente usa sus manos.
Al proporcionar a los cirujanos una visualización superior, una mayor destreza, mayor precisión y confort ergonómico, el sistema quirúrgico Da Vinci permite a los cirujanos realizar más procedimientos mínimamente invasivos abarcando disecciones o reconstrucciones complejas. Para el paciente, un procedimiento Da Vinci, puede ofrecer todos los beneficios potenciales de un procedimiento mínimamente invasivo, incluyendo menos dolor, menos pérdida de sangre y una menor necesidad de transfusiones. Además, el sistema Da Vinci, puede permitir una estancia hospitalaria más corta, una recuperación más rápida y un retorno más rápido a la normalidad las actividades diarias.[4]
Valores añadidos para el paciente
El principal valor añadido del robot da Vinci en prostatectomías respecto a la cirugía abierta es una reducción importante, tras la intervención quirúrgica, de los periodos necesarios para que la persona intervenida recupere la continencia urinaria y la potencia sexual, factores que influyen de forma muy sustancial en la mejora de la calidad de vida del paciente. Además, el uso del da Vinci ofrece al paciente todos los beneficios potenciales de un procedimiento mínimamente invasivo, incluyendo menos dolor, una menor pérdida de sangre, una estancia hospitalaria más corta y una recuperación más rápida.
Para el paciente, los beneficios pueden ser, entre otros:
- Mucho menos dolor y riesgo de infección.
- Menos pérdida de sangre.
- Menor riesgo de complicaciones en la intervención.
- Cicatrices más pequeñas.
- Menor tiempo de recuperación.
- Menos días de estancia en el hospital
- En muchos casos, mejores resultados clínicos.
- En problemas de próstata, reduce el riesgo de impotencia e incontinencia.
Procedimientos
El sistema quirúrgico Da Vinci fue autorizada por la FDA para Cirugía General Laparoscópica en el año 2000. El "Sistema Quirúrgico Da Vinci" es más comúnmente utilizado para las prostatectomías, reparación de válvulas cardíacas, y procedimientos quirúrgicos ginecológicos.
La Administración de Alimentos y Medicamentos (FDA) de los EE. UU. ha autorizado la cirugía para adultos y pediátricos en el uso de procedimientos quirúrgicos urológicos, en general los procedimientos quirúrgicos laparoscópicos, los procedimientos de cirugía laparoscópica ginecológica, procedimientos quirúrgicos toracoscópicos no-cardiovasculares y procedimientos cardíacos toracoscópicamente asistidos.
El sistema Da Vinci también puede ser empleado con mediastinotomía complementaria para realizar la anastomosis coronaria durante la revascularización cardiaca.[5]
El sistema Da Vinci está aceptado por la FDA para múltiples procedimientos quirúrgicos, entre los que destacan:
- Prostatectomía radical por cáncer de próstata.
- Carcinoma de endometrio.
- Cáncer de cérvix.
- Cáncer colo-rectal.
- Reparación valvular mitral.
- By-pass coronario.
- Cirugía de la obesidad mórbida, entre muchos otros procedimientos.
Usos clínicos representativos
Por definición, cualquier intervención que pueda ser realizada por laparoscopia o toracoscopia, es susceptible de realizarse con el Sistema Quirúrgico Da Vinci. No obstante, hay una serie de procedimientos que, por su complejidad técnica y, por tanto, por su larga curva de aprendizaje con la laparoscopia o toracoscopia convencionales, son especialmente idóneos para su realización con el robot:
- Urología: prostatectomía radical: Es un procedimiento complejo debido a que el cirujano cuenta con un campo de acción limitado con el sistema laparoscópico. El empleo del Sistema da Vinci reduce las complicaciones (menor sangrado, alta hospitalaria precoz (1,2 días)) y mejora el resultado funcional (menos incontinencia, menos impotencia). Pieloplastia: Intervención con una sutura complicada, muy difícil de hacer por laparoscopia convencional. El Sistema da Vinci permite obtener mejores resultados ya que permite una mayor apertura del uréter.
Otros procedimientos: cistectomía radical o parcial, nefrectomía, nefrectomía parcial, total o de donante vivo, reconstrucción del suelo pélvico, y reimplantación ureteral.
- Ginecología: histerectomía por cáncer: Cáncer de endometrio (tratamiento y estadiaje), Histerectomía con linfadenectomía pélvica y paraaórtica. Mejor estadiaje (mayor número de ganglios resecados, sobre todo paraaórticos izquierdos), Cáncer de cérvix, Histerectomía radical con linfadenectomía pélvica (Curva de adopción similar a la prostatectomía, pero con mucha mayor incidencia). Miomectomías: especialmente en pacientes en edad fértil. Ofrece una mayor precisión y un menor número de complicaciones. Otros peocedimientos: Histerectomía benigna, Reanastomosis tubáricas, anexectomías, etc.
- Cirugía General: Cáncer colo-rectal (recto bajo). Cirugía esofágica: miotomía de Heller, cáncer esófago, fundoplicaturas. Cirugía bariátrica.
Cirugía hepato-bilio-pancreática. Esplenectomías.
- Cirugía Cardio-torácica: Reparación válvula mitral: Sin esternotomía; la mayor incisión es de 15-20 mm; circulación extracorpórea por vía femoral; instrumental específico. By-pass coronario: Sin circulación extracorpórea ni esternotomía.
- Cirugía Pediátrica: Al estar disponible instrumental de 5 mm de diámetro, cualquier tipo de Cirugía Pediátrica mínimamente invasiva puede ser realizada con el Sistema Quirúrgico Da Vinci. (El Dr. Meehan de Seattle ha intervenido a más de 300 pacientes con 46 procedimientos diferentes).
- Cirugía torácica
El robot da Vinci puede realizar cualquier procedimiento que se pueda realizar mediante toracoscopia, pero con mucha mayor precisión y seguridad.
- Cirugía maxilofacial
El Sistema da Vinci permite realizar resecciones de tumores base de lengua, amígdalas, etc. mediante la introducción de los trócares través de la boca del paciente.
- Otorrinolaringología: Nueva especialidad en desarrollo en varios centros del Reino Unido (pendiente de FDA), para el tratamiento de neoplasias de base de lengua, suelo de boca y laringe.[5]
Futuro
Aunque el término general de "cirugía robótica" se usa a menudo para referirse a la tecnología, este término puede dar la impresión de que el robot ejecuta por sí solo la cirugía cosa que no es cierto porque no lo puede hacer, no puede actuar en forma autónoma. Lo que hace es replicar a escala y en forma precisa los movimientos que el cirujano hace en la consola de control.
Usos pediátricos de tecnología robótica
Los investigadores del Hospital de Niños de Boston han desarrollado y perfeccionado una técnica para ejecutar pieloplastias robóticamente asistidas y han completado recientemente un estudio de 18 meses es efectiva para los procedimientos de ampliación vesical.
Los resultados de las investigaciones realizadas en niños también han dado lugar a avances y mejoras en el equipo de robótica, por lo que es más adecuado para su uso en la cirugía pediátrica.
El sólido programa de investigación del Centro de Cirugía Robótica se centra en la búsqueda de seguridad y aplicaciones innovadoras de tecnología robótica.
La medición y los análisis de los resultados de la cirugía robótica es una ventaja frente a la cirugía abierta y beneficioso para el paciente.
Un segundo robot es utilizado para entrenar cirujanos y perfeccionar nuevas técnicas de cirugía y nuevos procedimientos robóticos.
Véase también
Referencias
- «Recomendaciones para el sistema de evaluación de dispositivos médicos».
- Intuitive Surgical's media kit
- «Robot Da Vinci X: Estrenamos lo último en cirugía robótica en España». Consultado el 4 de septiembre de 2017.
- J Minim Invasive Gynecol. 2008 May-Jun;15(3):286-91. Epub 2008 Mar 6
- «Intuitive Surgical - FDA Clearance». Consultado el 2009.
Enlaces externos
 Wikimedia Commons alberga una categoría multimedia sobre Robots quirúrgicos.
Wikimedia Commons alberga una categoría multimedia sobre Robots quirúrgicos.- Ellen McDonald, Ph.D.,Un sistema de cirugía robotizado da una mano, extraído de OncoLog, octubre de 2006, Vol. 51, No. 10
- Da Vinci, el primer robot cirujano, ya opera en la Argentina
- - El gobierno limita en Uruguay el uso del Robot Da-Vinci y desata la polémica
| Control de autoridades |
|
|---|
 Datos: Q2323044
Datos: Q2323044- Multimedia: Da Vinci Surgical System / Q2323044