Sistemas de segundo orden
En ingeniería de control un sistema de segundo orden se caracteriza porque tiene dos polos, la función de transferencia genérica de un sistema de segundo orden en lazo cerrado tiene la siguiente forma:
K ≡ Ganancia
δ ≡ Factor de amortiguamiento o frecuencia propia no amortiguada
ωn ≡ Frecuencia natural
Si sacamos las raíces del denominador observaremos que los sistemas de segundo orden pueden clasificarse en tres tipos diferente de sistemas, las raíces son:

Observando las raíces vemos que se nos presentan tres posibilidades según el valor que tome ya que puede ser mayor, menor o igual a 1, así pues la clasificación quedaría:

Sistemas subamortiguados
Los sistemas subamortiguados sólo se dan cuando , así pues obtenemos un par de números complejos, desarrollándolo obtenemos:

ωd ≡ Frecuencia forzada
Sistema críticamente amortiguado y sistema sobreamortiguado
Subamortiguado este tipo de sistema lo obtenemos cuando , la gráfica que siguen estos tipos de sistemas son una sigmoide y es el caso frontera, por decirlo de alguna manera, es el caso que separa un sistema subamortiguado de un sistema sobreamortiguado. La gráfica que describe un sistema críticamente amortiguado es parecida a la siguiente:
Los sistemas sobreamortiguados se dan cuando la curva que representa a estos tipos de sistemas es también una sigmoide como en el caso anterior pero todas las curvas que pueden seguir los sistemas Sobreamortiguados están por debajo de la que sigue uno críticamente amortiguado con lo que podemos deducir que es más lento que el caso frontera.

críticamente amortiguado lo obtenemos cuando

Especificaciones del transitorio
Las especificaciones del transitorio solo tienen sentido para los sistemas subamortiguados, presentaremos primero la gráfica que seguiremos para la explicación y seguidamente pasaremos a definir cada término.
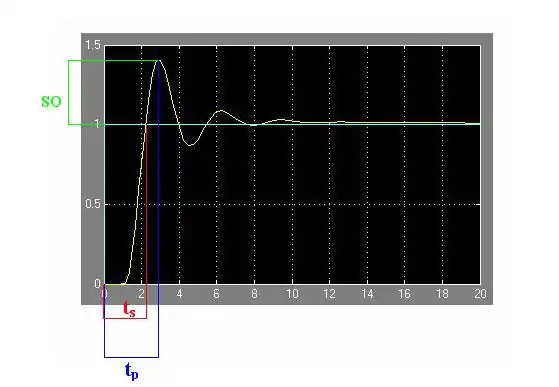
Para comenzar hay que decir que la referencia es una entrada en escalón de una unidad que se ve representada en color cían.
- Tiempo de subida
- Es el tiempo necesario para que la salida del sistema alcance un determinado porcentaje del valor final de la referencia. Si no se especifica dicho porcentaje se entiende que se medirá hasta que alcance el 100% del valor final. Otra forma de establecer el tiempo de subida es mediante una horquilla de valores, es decir, medir el tiempo que trascurre desde un porcentaje inicial hasta uno final, en nuestra gráfica el tiempo de subida está marcado con líneas rojas, se denomina ts.
- Sobreoscilación
- Se define como la amplitud de la primera oscilación en porcentaje sobre el valor final de referencia, en nuestra gráfica se ve representada por las líneas verdes y se denomina SO.
- Tiempo de pico
- Es el instante de tiempo en el que se produce la primera sobreoscilación en nuestro dibujo se ve representado mediante líneas azules y se denomina tp.
- Tiempo de establecimiento
- Se define como el tiempo que tarda la salida del sistema en establecerse en una franja alrededor del valor final, se toman dos tiempos de establecimiento, al ± 2% y al ± 5%
Los cuatro términos deben de ser lo menor posible para que el sistema sea más eficiente.
Si la gráfica se ajusta a la fórmula genérica de un sistema de segundo orden podemos calcular el valor de todos los términos anteriormente comentados de forma analítica utilizando las siguientes fórmulas.