Técnicas CFAR
Las técnicas CFAR (del acrónimo inglés Constant False Alarm Rate, "tasa constante de falsas alarmas") son un tipo de algoritmos adaptativos que suelen emplearse en sistemas radar con el objetivo de detectar blancos en presencia de ruido, clutter e interferencias. Otras técnicas CFAR se basan en algoritmos no adaptativos. Los detectores CFAR no adaptativos se conocen en ocasiones como "detectores CFAR clarividentes".[1]
Principios
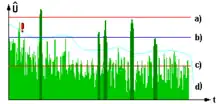
En un sistema radar debe determinarse un umbral de potencia eléctrica a partir del cual un eco recibido se considera un objetivo. Si dicho umbral es bajo, entonces más blancos serán detectados a costa de incrementar el número de falsas alarmas. Por el contrario, si el umbral es alto, entonces se detectarán menos blancos pero el número de falsas alarmas será también bajo. En la mayor parte de los sistemas el umbral se fija con objeto de alcancar un porcentaje determinado de falsas alarmas.
Si el entorno que rodea a un blanco es constante en función del tiempo y el espacio, entonces se puede elegir un umbral fijo para alcanzar esa probabilidad de falsa alarma deseada. Esta se calcula asumiendo que el ruido ambiental sigue una función de densidad de probabilidad determinada, generalmente una distribución normal. La probabilidad de detección es ese caso función de la relación señal/ruido del eco recibido. Sin embargo, en la mayor parte de los entornos, diferentes fuentes de interferencias y clutter ocasionan cambios en el nivel de ruido, tanto temporal como espacialmente. En estas situaciones, hay que elevar o bajar el umbral de forma dinámica para mantener la probabilidad de falsa alarma constante. A esto se le llama detección CFAR.
CFAR mediante promediado de celdas
En la mayor parte de los sistemas CFAR se divide la zona de cobertura radial en células. El umbral se calcula haciendo una estimación del nivel del fondo de ruido alrededor de la célula que se está estudiando. Esto puede hacerse tomando un conjunto de células alrededor de la misma y promediando potencias. Para evitar falsear esta estimación con potencia procedente de la propia celda suelen ignorarse las celdas inmediatamente adyacentes ("células de guarda"). Si la potencia detectada en una célula es a la vez mayor que la potencia en células adyacentes y que la potencia de ruido estimada mediante el promediado, entonces se considera que en esa región espacial hay un blanco. Esto se conoce como CFAR por promediado de celdas (CA-CFAR).
Otras variaciones consisten en calcular medias separadas para las celdas a la derecha y a la izquierda de la celda de interés, y usar la mayor (GO-CFAR) o la menor (LO-CFAR) de ellas como nivel de ruido en la celda de interés.
Técnicas avanzadas
Otros algoritmos CFAR más sofisticados pueden seleccionar adaptativamente el umbral llevando a cabo un estudio estadístico bastante riguroso del entorno en el que se desean detectar blancos. Esto es particularmente común en aplicaciones de vigilancia marítima, pues el clutter marítimo es muy irregular y no se puede modelar correctamente con una función densidad de probabilidad gaussiana. Constituye un problema de detección difícil, pues no es fácil diferenciar ecos procedentes de las rugosidades de la superficie del mar de aquellos procedentes, por ejemplo, de periscopios. El clutter marítimo se suele modelar con distribuciones K.
Referencias
- Gini, Greco, and Farina, "Clairvoyant and adaptive signal detection in non-Gaussian clutter:a data-dependent threshold interpretation", IEEE Trans. Sig. Proc. Jun 1999.
| Control de autoridades |
|
|---|
 Datos: Q644307
Datos: Q644307