Teoría de Mindlin–Reissner
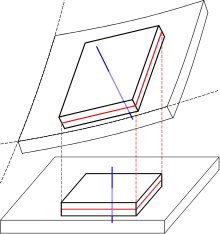
La teoría de Mindlin–Reissner (denominada también como teoría de placas Mindlin-Reisner) es parte de las teoría de placas y láminas en el estudio de mecánica de sólidos deformables. Se trata de una variante extendida de la teoría de Kirchhoff–Love aplicada a las placas delgadas que considera además los esfuerzos cortantes. La teoría fue propuesta inicialmente en el año 1951 por Raymond Mindlin.[1] No obstante, una idea similar fue propuesta anteriormente por Eric Reissner en 1945.[2] Ambas teorías eran un intento de explicar la deformación de la zona intermedia de una lámina delgada sujeta a flexión, en la que la normal a la superficie media permanece recta, pero no necesariamente perpendicular a la superficie. La teoría de Mindlin-Reissner se emplea en el cálculo de las deformaciones y tensiones en una placa cuyo grosor es de un décimo que las dimensiones de superficie mientras que la teoría de Kirchhoff-Love solo se aplica a placas muy delgadas.
La teoría de losas de Mindlin-Reissner se usa también para el análisis de placas laminadas pues en este tipo de placas las deformaciones transversales son muy importantes. Esta teoría también se extiende al análisis de láminas delgadas pues son muy versátiles para el análisis de placas tanto gruesas como delgadas y con materiales con distribución homogénea o materiales compuestos.
Generalidades de la teoría de Reissner-Mindlin
En esta teoría se relajan las condiciones para el movimiento en el plano de la placa, así que el movimiento en el plano se considera en los cálculos. Estos movimientos quedan descritos de la siguiente manera:



Donde y representan la distorsión angular que sufre la sección transversal al no permanecer ortogonal al plano medio de la placa. Esta formulación solamente es válida para relaciones



Hipótesis de la teoría de Reissner-Mindlin
La teoría de placas de Reissner-Mindlin tiene las siguientes suposiciones:
- El dominio en el que se desarrolla la teoría tiene la siguiente forma:
![{\displaystyle \Omega =\{(x,y,z)\in \mathbb {R} ^{3}|z\in \left[{\frac {-t}{2}},{\frac {t}{2}}\right],(x,y)\in A\subset \mathbb {R} ^{2}\}}](../I/3faf519d70157d2e9a9fa05794b8bfc4fdab783a.svg)
Donde representa el grosor de la placa.

- Los esfuerzos normales en la dirección z son equivalentes a cero. Así:

Esta hipótesis está en contradicción aparente con la segunda hipótesis pero en realidad no causa problemas, pues se supone que no se aplican cargas puntuales.
- El desplazamiento en la dirección z es equivalente a w(x,y), de esta manera el desplazamiento a lo largo del eje vertical quedaría expresado como:

. Esto quiere decir que el desplazamiento vertical no cambia a lo largo del grosor de la placa
- El desplazamiento en dirección x y y depende de la rotación alrededor el eje de la siguiente manera:


Esto quiere decir que la sección transversal antes de la deformación permanece plana pero no ortogonal al plano medio de la viga después de la deformación. representa el giro de la sección normal al eje neutro de la viga, esto es


Por simplicidad se considera que el materia es isotrópico y linealmente elástico.
Definición del campo de desplazamientos y vector de movimientos
El campo de desplazamientos queda definido de la siguiente manera:

Donde: y Para pequeñas deformaciones, cumpliendo así las hipótesis de la teoría en cuestión. De acuerdo a todo lo formulado con anterioridad se puede definir el vector de movimientos que representa el movimiento del plano medio de la losa (es decir z=0) de la siguiente manera:



Con toda la formulación que se tiene se puede observar y no dependen solamente de la deflexion, por lo tanto se puede tratar como una variable independiente.


Definición de las curvaturas de la losa
La matriz de curvaturas y giro de la losa se definen de manera matricial como:

Cabe anotar que representa una concavidad positiva (estiramiento del plano inferior de la placa), una concavidad negativa (estiramiento del plano inferior de la placa) y que no existe deformación en la viga (véase Concavidad).



Definición del campo de deformaciones
Las deformaciones según la teoría de Mindlin-Reissner estarían dadas de la siguiente manera:



se tiene que debido a que el desplazamiento vertical no depende de la posición del punto a lo largo del plano transversal de la viga.

Las deformaciones angulares deben cumplir con las hipótesis planteadas anteriormente de la siguiente manera:



Por lo tanto el campo de deformaciones queda definido de la siguiente manera:

Donde representan el vector de deformaciones por flexion y el vector de deformaciones por cortante.


Definición del campo de esfuerzos de la losa
Los esfuerzos que se tienen en cuenta según la teoría de Mindlin-Reissner son los siguientes:

Donde representan el vector de esfuerzos debidos a flexion y el vector de esfuerzos debidos a cortante. Se toma a según la hipótesis 2 de la teoría de losas de Mindlin-Reissner.



Relación entre esfuerzos y deformaciones en la losa
Ahora, considérese una losa con un material homogéneo y en condiciones isotermales. La matriz constitutiva D usada en esta teoría corresponde a una combinación de la matriz constitutiva de tensión plana en 2D y la matriz de corte escrita a continuación:

En donde la matriz se denomina matriz constitutiva por flexión y está definida como:


y la matriz se denomina matriz constitutiva de cortante y está definida como:


Ahora, al igual que en la Teoría de Vigas de Timoshenko los esfuerzos y no tienen la distribución parabólica que estos tienen en la teoría, por lo tanto se trabaja con un denominado coeficiente de distorsión lateral que hace que tanto la distribución teórica de y como la distribución hallada mediante la teoría de Mindlin-Reissner tengan el mismo trabajo de deformación. Así, para losas el coeficiente de distorsión está determinado por 5/6 (). Así, la matriz constitutiva por cortante queda definida de la siguiente manera:






Por lo tanto, el campo de esfuerzos quedaría descrita de la siguiente manera de acuerdo a la ley de elasticidad de Hooke:

Aplicando la teoría de losas tratada a la ley de elasticidad de Hooke se obtiene el siguiente resultado:

Por lo tanto la relación entre esfuerzos y deformaciones hacen que se puedan clasificar los esfuerzos de la siguiente manera: existen unos esfuerzos de flexión y unas deformaciones por flexión que están descritos de la siguiente manera:

desglosando la ecuación se tiene que:

Y de la misma manera existen los esfuerzos por cortante y las deformaciones transversales por cortante que están relacionados de la siguiente manera:

Y de manera matricial quedarían descritas de la siguiente manera:

Por lo tanto las deformaciones se puede escribir de la siguiente manera:

Y la relación entre esfuerzos y deformaciones estaría descrita a continuación:

Vector de deformaciones generalizadas
El vector de deformaciones se puede escribir de la siguiente manera:


Donde representa el vector de deformaciones por flexión generalizadas

Vector de esfuerzos generalizados
Los esfuerzos se pueden expresar a través de un vector de esfuerzos generalizados de la siguiente manera:


Pero se tiene que y , reemplazando estos valores en la anterior ecuación se tiene que:



Las matrices y se denominan matriz constitutiva generalizada de flexión y matriz constitutiva generalizada de cortante respectivamente.


Relación entre esfuerzos generalizados y deformaciones generalizadas
Así, los esfuerzos generalizados y las deformaciones generalizadas quedarían de la siguiente manera:

Bibliografía
- R. D. Mindlin, 1951, Influence of rotatory inertia and shear on flexural motions of isotropic, elastic plates, ASME Journal of Applied Mechanics, Vol. 18 pp. 31–38.
- E. Reissner, 1945, The effect of transverse shear deformation on the bending of elastic plates, ASME Journal of Applied Mechanics, Vol. 12, pp. A68-77.
Hughes, Thomas J.R (1987). «5». The Finite Element Method (en inglés). Dover Publications. pp. 311. (requiere registro).
Reddy, J.N (2006). «6». And introduction to the finite element method (en inglés) (3 edición). Mc Graw Hill. pp. 311. (requiere registro).
Oñate, Eugenio (213). «6». Structural Analysis with the Finite Element Method Linear Statics (en inglés) (1 edición). Springer.
Véase también
- Teoría de Vigas de Timoshenko - Teoría de vigas que tiene en cuenta las deformaciones por cortante.
- Ley de Hooke
| Control de autoridades |
|
|---|
 Datos: Q3564249
Datos: Q3564249