Ultrasonido
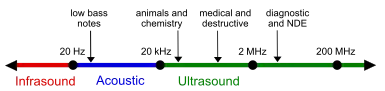
Los ultrasonidos son una serie de ondas mecánicas, generalmente longitudinales, cuya frecuencia está por encima de la capacidad de audición del oído humano. El ultrasonido no tiene propiedades diferentes de las ondas audibles, excepto que los humanos no pueden oírlas. El límite varía dependiendo de la persona y es de unos 20 kHz en jóvenes de menos de 18 años aproximadamente. Los equipos de ultrasonido operan con frecuencias más elevadas de 20 kHz aunque la mayoría de los transductores actualmente empleados operan a frecuencias mucho más altas (MHz).[1]
Este tipo de ondas es usado en diferentes campos, siendo el más común la medicina en su rama diagnóstica y terapéutica principalmente, como también en la industria. Los equipos de ultrasonido son empleados para detectar objetos o medir distancias.
Cabe destacar que la técnica más común en medicina que emplea los ultrasonidos es la ecografía. Son ensayos no destructivos de productos y estructuras, para encontrar invisibles fallas. En la industria es usado para limpiar, soldar plásticos y metales, cortar, conformar, comprobar materiales, mezclar, desgasificar, pulverizar, localizar, medir y acelerar procesos químicos. Por otro lado, animales como los murciélagos y los cetáceos lo usan para encontrar a sus presas y detectar obstáculos.[2]
Historia
Partimos del principio en que el ultrasonido (US) no es un invento, sino un evento físico natural que puede ser provocado por el hombre. Las aplicaciones que hoy tiene no son más que la suma de varios experimentos llevados a cabo a lo largo de la historia.
En el siglo XVIII el biólogo italiano Lazzaro Spallanzani descubrió en el año 1700 la existencia de estas ondas sonoras, observando como los murciélagos atrapaban sus presas.[3]
En la primera mitad del siglo XIX (1803-1899), el físico y matemático austriaco Christian Andreas Doppler dio a conocer su trabajo sobre el "Efecto Doppler" el cual consistía en observar ciertas propiedades de la luz en movimiento, que eran aplicables a las ondas del Ultrasonido.[3]

El siglo XIX supone el inicio del conocimiento del ultrasonido a partir del silbato de Galton y del diapasón, que eran capaces de producirlo; aunque sólo se producían a muy bajas frecuencias, eran suficientes para comprobar las distintas barreras existentes en el oído entre el hombre y los animales. A finales de siglo, en Francia se detectan este tipo de ondas y se empiezan a hacer numerosas investigaciones sobre sus usos. Como consecuencia a principios del siglo XX el físico francés P. Langevin y el Dr. C. Chilowsky lograron desarrollar el primer generador ultrasónico por medio de un piezoeléctrico.[4]
A comienzos del siglo XX, se realiza una de las primeras aplicaciones en el área de la marina, después de que el físico francés Paul Langevin inventara el Sonar, en el cual se basó el posterior desarrollo de los equipos usados en la aviación y luego en medicina terapéutica y diagnóstica.
En 1924 el científico ruso S. Y. Sokolov propuso el uso del ultrasonido como mecanismo válido para la inspección industrial, particularmente para la búsqueda de defectos.[4]
Al término de la Segunda Guerra Mundial, investigadores japoneses, americanos y de otros países europeos empezaron a desarrollar los primeros prototipos de diagnóstico por ultrasonido en medicina, primero en modo Analogue y posteriormente en modo Bright con imagen analógica.[3][4]
Es al comienzo de la década de los años 70 donde se introduce el scan converter con el que se logran las primeras imágenes de la anatomía en escala de grises. Años más tarde, se agregan los micro-procesadores controlados, lo que permite la obtención de imágenes en tiempo real de alta resolución; esto supuso la aceleración de pruebas diagnósticas y una fantástica aceptación clínica.
Percepción
Humanos
El límite superior de frecuencia en humanos (aproximadamente 20 kHz) se debe a limitaciones del oído medio. La sensación auditiva puede ocurrir si la ecografía de alta intensidad alimenta directamente al cráneo humano y llega a la cóclea a través de la conducción ósea, sin pasar por el oído medio.[5]
Los niños pueden escuchar algunos sonidos agudos que los adultos no pueden percibir, ya que en los humanos el tono límite superior de la audición tiende a disminuir con la edad.[6] Una compañía estadounidense de teléfonos móviles utilizó este principio para crear señales de llamada telefónica que supuestamente sólo eran audibles para personas más jóvenes,[7] pero muchas personas mayores podían percibirlas, lo que se debía a la considerable variación del deterioro relacionado con la edad en la audición superior límite. El Mosquito es un dispositivo electrónico que utiliza una frecuencia de tono elevado para disuadir a los jóvenes de merodear.

Animales
Algunas especies como ciertos insectos y mamíferos (los delfines y los murciélagos) lo utilizan de forma parecida a un radar para su orientación; a este fenómeno se lo conoce como ecolocalización. Se sabe que las ondas emitidas por estos animales son tan altas que “rebotan” fácilmente en todos los objetos alrededor de ellos, permitiéndoles crear una “imagen” de lo que está a su alrededor para poder orientarse fácilmente.
De igual manera, los aparatos emisores de ultrasonidos son empleados con frecuencia como métodos anti-plagas con el fin de espantar roedores e insectos.
Principio
Física
El ultrasonido se define como una serie de ondas mecánicas, generalmente longitudinales originadas por la vibración de un cuerpo elástico (cristal piezoeléctrico) y propagadas por un medio material (tejidos y órganos corporales) con una frecuencia que supera la del sonido audible por el humano, superior a 20kHz. La frecuencia de este consiste en el número de ciclos o cambios de presión que ocurren por segundo la cual se cuantifica en ciclos por segundo o hercio.[8]
Las características del ultrasonido son:
- Frecuencia: determinada por la fuente emisora del sonido y por el medio atravesado. En medicina, con fines de diagnóstico, se emplean frecuencias entre 2 y 30MHz.
- Velocidad de propagación: varía en función de la densidad y la compresibilidad del material. Es decir, las moléculas en los tejidos más comprensibles estarán muy separadas por lo que su transmisión es más lenta.
- Interacción con la materia, mediante estimulación de moléculas que transmiten energía entre ellas al interactuar.
- Longitud de onda. Al atravesar un tejido sucede la reflexión de haces ultrasónicos hacia un transductor, llamado "eco".
- Impedancia acústica. Provee evidencia de la identidad de diferentes materias o tejidos que se atraviesan de un medio a otro. esto da lugar a una interfase entre estos materiales.
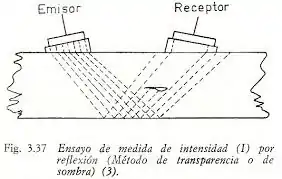
- Ángulo de incidencia. La intensidad con la que el haz de US se refleja dependerá del ángulo. Esta técnica requiere de un águlo exacto para una correcta detección por la fuente receptora.
- Atenuación
- Frecuencia de repetición de pulsos
Al exponer tejidos vivos a ultrasonidos, éstos van a experimentar los siguientes procesos:
- Atenuación: Las ondas sonoras dentro de un material sufren atenuación y por ello nos es imporsible percibirlas con la misma intensidad.
- Refracción: Dependiendo de la interfaz atravesada, la dirección de la onda sonora refractada dependerá de la orientación de la interfaz respecto a la incidente (ley de Snell)
- Dispersión o Scattering: Parte de las ondas sonoras al encontrarse con una interfaz se reflejan en todas direcciones. Proporciona ruido y artefactos en las imágenes (efectos indeseados)
- Reflexión: Parte de las ondas sonoras al encontrarse con una interfaz se reflejan con un ángulo similar al incidente. Fenómeno proporcionado por el eco.
Desde aquí, para imagen diagnóstica, el efecto más importante es la reflexión.
Formación de imagen
La microscopía acústica es la técnica de usar ondas de sonido para visualizar estructuras demasiado pequeñas para ser resueltas por el ojo humano. Se utilizan frecuencias de hasta varios gigahercios en microscopios acústicos. La reflexión y la difracción de las ondas sonoras de las estructuras microscópicas pueden proporcionar información no disponible con luz.
Los pasos siguientes son los esenciales para obtener una imagen de estos pulsos de ondas ultrasónicas:
Paso 1: Emisión de un pulso de onda
Paso 2: Medición del tiempo y de la intensidad del eco
El eco acústico se produce entre dos materias con diferentes propiedades acústicas. Se producirá menos eco para materias de menor coeficiente de reflexión (es decir, agua, grasa, tejidos blandos...)[10]
Paso 3: Reconstrucción mediante empleo de velocidad propagación de onda conocida
Las imágenes obtenidas serán diferentes en función del coeficiente de atenuación de la materia atravesada.
Resolución de los ultrasonidos
Los materiales más densos tienen mayores enlaces atómicos, lo que ralentiza la velocidad de propagación del sonido.
La longitud de onda determina la resolución mínima del instrumento, que determina el detalle más fino que se puede detectar:

La resolución permite así entender el tamaño de un tejido de distinta densidad en función de la sensibilidad del instrumento de detección. Esta incrementa en función de la frecuencia y su poder de penetración decrece con la frecuencia.
| Pros | Contras |
|---|---|
| Rápido | Baja resolución |
| Barato | Imagen ruidosa y de difícil interpretación |
| Seguro | Bajo poder de penetración |
| Vídeo en tiempo real en hasta 4D
(más fácil interpretación que imágenes) |
A mucha densidad de un material absorbe demasiados US.
En consecuencia, imágenes poco fiables |

El dispositivo de Ultrasonidos
El dispositivo de ultrasonido básico consta de las siguientes partes:
Sonda del transductor
Sonda que envía y recibe ondas de sonido utilizando el efecto piezoeléctrico (recibe los ecos) En la sonda hay uno o más cristales de cuarzo llamados cristales piezoeléctricos. Cuando se aplica una corriente eléctrica a estos cristales, cambian de forma rápidamente. Los rápidos cambios de forma, o vibraciones, de los cristales producen ondas de sonido. Cuando las ondas de sonido golpean los cristales, estos emiten corriente eléctrica a su vez. De este modo, se pueden usar para emitir y recibir ondas de sonido.
Es importante destacar que estas ondas de US se producen en pulsos debido a que los cristales se usan de forma dual. En el tiempo entre la emisión y la recepción de estos pulsos, las ondas atraviesan el tejido o materia, para después los ecos producidos deformen los cristales y producir la señal eléctrica a interpretar como imagen en el monitor.
Importante: La sonda tiene una sustancia absorbente de sonido para eliminar reflejos de la sonda y una lente acústica para ayudar a enfocar las ondas de sonido emitidas.
Además,existen distintos tipos de sondas: lineales o por sectores.Esta clasificación se debe a la disposición de los cristales (matriz) y la forma del campo de imagen producido en el monitor.
La cantidad de elementos de cristal y la forma de la sonda determina su campo de visión y la frecuencia de las ondas emitidas: determina capacidad de penetración y resolución de imagen. Como ejemplo, las sondas de elementos múltiples, cada cristal tiene su propio circuito lo que permite dar dirección al haz de luz y cambiar su sincronización. Por otro lado, hay sondas adaptables a zonas específicas del cuerpo de manera a obtener mayor proximidad al órgano en cuestión.

Los transductores de sector son los más útiles para obtener imágenes de estructuras más profundas. Se consideran multipropósito comunes.
| CARACTERÍSTICAS | Transductores lineales | Transductores de sector |
|---|---|---|
| Disposición cristales | Línea recta | Matrices curvilíneas |
| Tipo de imagen generada | Imagen rectangular | Imagen en forma de abanico |
| Campo cercano imagen | Ancho | Estrecho |
| Campo cercano imagen | Ancho | Amplio |
CPU
Computadora que hace todos los cálculos y contiene las fuentes de alimentación eléctrica para sí misma y la sonda del transductor. La CPU contiene el microprocesador, la memoria, los amplificadores y las fuentes de alimentación para el microprocesador y la sonda del transductor. La CPU envía corrientes eléctricas a la sonda del transductor para emitir ondas de sonido, y también recibe los pulsos eléctricos que se crearon a partir de los ecos de retorno. La CPU realiza todos los cálculos involucrados en el procesamiento de los datos. Una vez procesados los datos, la CPU forma la imagen en el monitor. La CPU también puede almacenar los datos procesados y / o la imagen en el disco.
Controles del pulso del transductor
Cambia la amplitud, la frecuencia y la duración de los pulsos emitidos por la sonda del transductor. Los controles del pulso del transductor permiten al operador establecer y cambiar la frecuencia y la duración de los pulsos de ultrasonido, así como el modo de exploración de la máquina. Los comandos del operador se traducen en corrientes eléctricas cambiantes que se aplican a los cristales piezoeléctricos en la sonda del transductor.

Las máquinas de ultrasonido tienen varios controles para alterar la imagen:
- El control que altera la intensidad del haz de ultrasonido se denomina control de potencia. Este control altera la cantidad de voltaje que se entrega a los cristales piezoeléctricos y, por lo tanto, la intensidad del haz de ultrasonido y los ecos de retorno. Para aumentar la señal de los ecos sin crear artefactos no deseados, es recomendable mantener la potencia lo más baja posible y, en su lugar, ajustar la amplificación de los ecos. Esto se puede hacer ajustando el control de compensación de ganancia-tiempo (TCG).
- El control de compensación de ganancia-tiempo (TCG) permite ajustar la amplificación de los ecos de retorno a varias profundidades. Este control generalmente aparece como una columna de controles deslizantes. Cada control deslizante controla una sección particular del monitor, con el primer control deslizante alterando los ecos más superficiales y cada control deslizante sucesivo controlando ecos más profundos.[11]
- El control de ganancia altera uniformemente el brillo de todos los ecos en el monitor, independientemente de su ubicación.
- Un control de profundidad permite controlar la profundidad de la visualización de la imagen. Puede ser necesario cambiar el control de profundidad para colocar la estructura de interés en el centro del monitor y optimizar así su visualización
Pantalla
Muestra la imagen de los datos de ultrasonido procesados por la CPU. El modo utilizado para la visualización depende del tipo de dispositivo, la información que se quiere obtener y el órgano que se está examinando.
- Modo amplitud: los ecos se muestran en el monitor como picos que se originan en una línea de base vertical u horizontal. La profundidad del eco está determinada por la posición del pico en el eje (más arriba o a la izquierda será más superficial, más abajo o a la derecha será más alejado). La altura del pico depende de la amplitud del eco. Este modo no se usa con frecuencia más que en oftalmología.
- Modo brillo: los ecos se representan mediante puntos en una línea que forma la base de una imagen bidimensional. El brillo de cada punto indica la amplitud del eco registrado. Su ubicación relativa al transductor se muestra a lo largo del eje vertical del monitor, con la parte superior del monitor representando lo más cercano al transductor. Con cada pasada del haz de ultrasonido, se generan múltiples líneas de puntos en el monitor, produciendo una imagen completa. Debido a que se realizan varios barridos de haz por segundo, se genera una imagen en movimiento y cambiante "en tiempo real".
Teclado / cursor
Ingresa datos y toma medidas desde la pantalla.
Impresora
Imprime la imagen a partir de los datos mostrados. Ya sea a color o a blanco y negro
Dispositivo de almacenamiento en disco (disco duro, CD)
Almacena las imágenes adquiridas.


Aplicaciones médicas
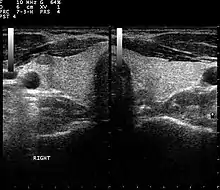
Medicina
El ultrasonido médico es una técnica de diagnóstico por imagen médica basada en ultrasonido que se utiliza para visualizar músculos, tendones y muchos órganos internos para capturar su tamaño, estructura y cualquier lesión patológica con imágenes tomográficas en tiempo real.[12] Es de especial utilidad en este sector porque permite observar imágenes del interior del cuerpo en forma innocua y simple, por lo cual se le conoce como el "fonendoscopio moderno". Tal como se aplica actualmente en el campo de la medicina, la ecografía realizada adecuadamente no presenta riesgos conocidos para el paciente. La ecografía no utiliza radiación ionizante, y los niveles de potencia utilizados para la obtención de imágenes son demasiado bajos para causar efectos adversos de calentamiento o presión en los tejidos.[13]
Es muy simple para el médico de cabecera determinar por ejemplo cuando un paciente requiere cirugía urgente y cuando no la requiere. Así mismo, simplifica el diagnóstico de manera rápida y descarta posibles defectos en tejidos más blandos.
Los ultrasonidos han sido utilizados por radiólogos y ecografistas para obtener imágenes del cuerpo humano durante al menos 50 años y se han convertido en una herramienta de diagnóstico ampliamente utilizada. La tecnología es relativamente barata y portátil, especialmente cuando se compara con otras técnicas, como la resonancia magnética (MRI) y la tomografía computarizada (CT).
La ecografía también se usa cada vez más en casos de trauma y primeros auxilios, y la ecografía de emergencia se convierte en un elemento básico de la mayoría de los equipos de respuesta EMT. Además, el ultrasonido se usa en casos de diagnóstico remoto donde se requiere teleconsulta, como experimentos científicos en el espacio o diagnóstico de equipos deportivos móviles.
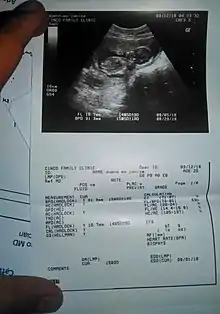
También se emplea para visualizar fetos durante la atención rutinaria prenatal y de emergencia. Dichas aplicaciones de diagnóstico utilizadas durante el embarazo se denominan ecografía obstétrica, la cual veremos a continuación.
Aunque todavía se desconocen los efectos a largo plazo debido a la exposición al ultrasonido a la intensidad de diagnóstico, actualmente la mayoría de los médicos consideran que los beneficios para los pacientes son mayores que los riesgos. El principio ALARA (tan bajo como sea razonablemente posible) se recomienda para exámenes de ultrasonido, con el fin de mantener el tiempo de escaneo y la configuración de potencia lo más bajo posible pero consistente con las imágenes de diagnóstico en usos no médicos.[14]
Como mejoría, la ecografía Doppler se basa en el efecto del mismo nombre. Cuando el objeto que refleja las ondas de ultrasonido se mueve, cambia la frecuencia de los ecos, aumentando la frecuencia si se mueve hacia la sonda y disminuyéndola si se aleja de la sonda. Cuánto cambia la frecuencia depende de cómo de rápido se mueva el objeto. La ecografía Doppler mide el cambio en la frecuencia de los ecos para calcular lo rápido que se mueve un objeto. Se utiliza principalmente para medir la velocidad del flujo sanguíneo a través del corazón y las arterias principales. Veremos a continuación su aplicación en cardiología, principalmente.
Obstetricia

Esta técnica diagnóstica también se conoce como ecografía o sonografía.[15]
La máquina de ultrasonido tiene cristales piezoeléctricos que al ser estimulados por electricidad vibran produciendo ondas sonoras de alta frecuencia que hacen eco en las estructuras corporales retornando a los cristales que nuevamente estimulados ahora por ultrasonido producen pequeños voltajes que son procesados de acuerdo a su intensidad y tiempo de retorno mediante un computador que tiene un convertidor de barrido digital creando así las imágenes. A diferencia de los rayos X, en este examen no se presenta ninguna exposición a la radiación ionizante y no se ha detectado ningún riesgo utilizado con los aparatos apropiados para diagnóstico. En la actualidad existen ecógrafos del tamaño de un celular que pueden ser empleados para diagnóstico inmediato.[16]
Las frecuencias típicas utilizadas para aplicaciones en abdomen pueden ir desde 2,0 MHz a 5,0 MHz mientras que para regiones como mama, músculo-esqueléticas, tiroides, etc., las frecuencias pueden oscilar entre 8,0 MHz a 16,0 MHz. Se utilizan frecuencias más altas para medición de estructuras muy pequeñas y superficiales
En intensidades y tiempos de aplicación muy superiores a los empleados en diagnóstico por ultrasonidos se ha detectado cavitación (formación de burbujas) y aumento de temperatura, así como sonoluminiscencia que es la emisión de luz mediante estimulación con ultrasonido
El Doppler es una variedad de la ecografía tradicional, siendo su uso más útil la visualización del flujo líquido dentro del cuerpo. Además, se emplea la representación en color para determinar el sentido y velocidad del flujo líquido. El Doppler ya se usa muy poco en obstetricia pues su potencia es mucho más elevada y puede producir efectos adversos en el feto.
Cardiología
Dentro de este ámbito se ubica la ecocardiografía que también permite obtener una presentación en forma de gama de colores acordes con la velocidad de un fluido, como la sangre. esta técnica tiene especial incidencia en:
- Dilatación de partes del corazón y función de ventrículos y válvulas del corazón.
- Ecocardigrama transtorácico: En este caso, el transductor (o sonda) de ecocardiografía se coloca en la pared torácica (o tórax) del sujeto, y las imágenes se toman a través de la pared torácica.
- Ecocardiograma transesofágico: Una sonda acabada en un transductor se pasa a través del esófago del paciente. Esto permite la evaluación de una imagen directamente detrás del corazón. Se utilizan con mayor frecuencia cuando las imágenes transtorácicas son de baja calidad.

Urología
Mide la cantidad de fluido retenido en la vejiga del paciente.
Sonogramas pélvicos muestran los órganos de la región pélvica: útero, ovarios, vejiga urinaria, próstata y testículos.
Existen dos métodos para realizar una ecografía pélvica: externa o interna. La ecografía pélvica interna se realiza transvaginalmente (en una mujer) o transrectal (en un hombre).
Muscoesqueleto
Tendones, músculos, nervios, ligamentos, masas de tejidos blandos y superficies óseas. Es una alternativa a la radiografía en la detección de fracturas de muñeca, codo y hombro para pacientes de hasta 12 años.
Endocrinología, laringología
La mayoría de las estructuras del cuello, incluyendo las glándulas tiroides y paratiroides, los ganglios linfáticos y las glándulas salivales, se visualizan bien mediante ultrasonidos de alta frecuencia con imágenes de alta calidad. La ecografía es una modalidad de imagen con especial incidencia en lesiones de tiroideas.[18]
Muchas otras condiciones benignas y malignas en la cabeza y el cuello pueden ser evaluadas y manejadas con la ayuda de ultrasonido de diagnóstico y procedimientos guiados por ultrasonido.
Sistema digestivo

En la ecografía abdominal, se forman imágenes de los órganos sólidos del abdomen como el páncreas, la aorta, la vena cava inferior, el hígado, la vesícula biliar, los conductos biliares, los riñones y el bazo. Las ondas sonoras son bloqueadas por el gas en el intestino y atenuadas en diferentes grados de grasa, por lo que hay capacidades de diagnóstico limitadas en esta área. El apéndice a veces se puede ver cuando se inflama.[19]
Veterinaria
El ultrasonido de diagnóstico se usa externamente en caballos para la evaluación de lesiones de tejidos blandos y tendones, e internamente en particular para el trabajo reproductivo: evaluación del tracto reproductivo de la yegua y detección de preñez.[20] También se puede usar de manera externa en sementales para la evaluación de la condición y el diámetro testicular, así como internamente para la evaluación reproductiva (conducto deferente, etc.).
A principios de siglo, la industria del ganado cárnico comenzó a utilizar la tecnología de ultrasonido para mejorar la salud de los animales y el rendimiento de las operaciones de ganado. El ultrasonido se usa para evaluar el grosor de la grasa, el área del ojo costal y la grasa intramuscular en animales vivos. También se utiliza para evaluar la salud y las características de los terneros no nacidos.
La tecnología de ultrasonido proporciona un medio para que los productores de ganado obtengan información que pueda usarse para mejorar la cría y la cría de ganado. Esta tecnología puede ser costosa y requiere un compromiso de tiempo considerable para la recopilación continua de datos y la capacitación del operador. Sin embargo, esta tecnología ha demostrado ser útil para administrar y ejecutar una operación de cría de ganado.[21]
Terapéutica
En fisioterapia se ha utilizado desde la década de 1940 especialmente para reducir el dolor o mejorar la inflamación en músculos profundos, tratar el tejido conectivo: ligamentos, tendones y fascia (y también tejido cicatricial).[22] Específicamente, los terapeutas emplean esta técnica para el tratamiento de esguinces de ligamentos, distensiones musculares, tendinitis, inflamación articular, fascitis plantar, metatarsalgia, irritación de las facetas, síndrome de pinzamiento, bursitis, artritis reumatoide, osteoartritis y adhesión de tejido cicatricial.

Se emplea con intensidades más potentes y frecuencias altas, alrededor de los 1-3 MHz. Existen un número elevado de médicos que desconfían del programa y no lo recomiendan a sus pacientes.[23] No existe una amplia cantidad de estudios realizados al respecto, y el diseño de los que existen no permite confirmar, ni desmentir, la eficacia en el tratamiento de las patologías del sistema músculo-esquelético; es necesario por tanto seguir estudiando.[24]
Su uso es analgésico, de regeneración, antiinflamatorio, y su onda de rebote recorre hasta un 100 % el hueso, debemos tener mucho cuidado en la aplicación de este medio, por las complicaciones que esta acarrea, con mayor preocupación en las mujeres y niños, que al igual que todos los agentes físicos en rehabilitación, puede producir mutaciones en las células del cuerpo humano( alterando las células y llegando a alterar algunos tipos de tumores), por ello es que este tipo de equipos debe ser usado exclusivamente por profesionales altamente capacitados, para evitar todas las complicaciones que acarrea tanto a los pacientes como a los que lo aplican.
Otro ejemplo de su uso en medicina es la Litotricia extracorpórea por ondas de choque, una técnica terapéutica para el tratamiento de la litiasis renal.
Aplicaciones tecnológicas
Sensor sin contacto
Se trata de un sistema de detección que no requiere contacto con el objetivo. En múltiples procesos en las industrias médica, farmacéutica, militar y en general, esta es una ventaja respecto a los sensores en línea que pueden contaminar los líquidos dentro de un recipiente o tubo ya que estos tienen como inconveniente que pueden estar obstruidos por el producto.
Se utilizan tanto sistemas de onda continua como pulsados. El principio detrás de una tecnología ultrasónica pulsada es que la señal de transmisión consiste en ráfagas cortas de energía ultrasónica. Después de cada explosión, la electrónica busca una señal de retorno dentro de una pequeña ventana de tiempo correspondiente al tiempo que tarda la energía en pasar a través del material. Sólo una señal recibida durante esta ventana se tendrá en cuenta para el procesamiento de una señal adicional.[25]
Una aplicación popular para el consumidor del alcance ultrasónico fue la cámara Polaroid SX-70, que incluía un sistema transductor fino para enfocar la cámara automáticamente. Más tarde, Polaroid autorizó esta tecnología de ultrasonido y se convirtió en la base de una variedad de productos ultrasónicos.[26]
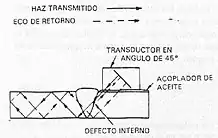
Industria: Prueba ultrasónica de testeo
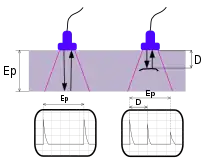
La prueba ultrasónica es un tipo de prueba no destructiva comúnmente utilizada para encontrar defectos en los materiales y para medir el grosor de los objetos. Se emplean comúnmente frecuencias entre 2 y 10 MHz, pero para fines más específicos se utilizan otras frecuencias. La inspección puede ser manual o automatizada y es una parte esencial de los procesos de fabricación modernos. La mayoría de los metales se pueden inspeccionar, así como los plásticos y los compuestos aeroespaciales. El ultrasonido de baja frecuencia (50–500 kHz) también se puede utilizar para inspeccionar materiales menos densos como madera, concreto y cemento.
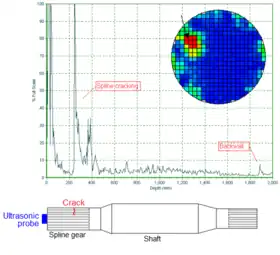
La inspección por ultrasonido de las juntas soldadas ha sido una alternativa a la radiografía para las pruebas no destructivas desde la década de 1960. Esta técnica elimina el uso de radiación ionizante, lo que beneficia la seguridad y el costo de estas pruebas. Por otro lado, la ecografía también puede proporcionar información adicional, como la profundidad de los defectos en una unión soldada.
Estas pruebas han evolucionado de métodos manuales a sistemas computarizados que automatizan gran parte del proceso. Una prueba ultrasónica de una articulación puede identificar la existencia de fallas, medir su tamaño e identificar su ubicación. No todos los materiales soldados son igualmente susceptibles de inspección ultrasónica; algunos materiales tienen un gran tamaño de grano que produce un alto nivel de ruido de fondo en las mediciones.
También se emplean equipos de ultrasonido en ingeniería civil, para detectar posibles anomalías, así como para la limpieza de objetos, como, por ejemplo, carburadores.
Navegación: el Sonar
El sonar puede usarse como medio de localización acústica, funcionando de forma similar al radar, con la diferencia de que en lugar de emitir ondas electromagnéticas emplea impulsos sonoros. De hecho, la localización acústica se usó en aire antes que el GPS, siendo aún de aplicación el SODAR (la exploración vertical aérea con sonar) para la investigación atmosférica. La señal acústica puede ser generada por piezoelectricidad o por magnetostricción.[27]
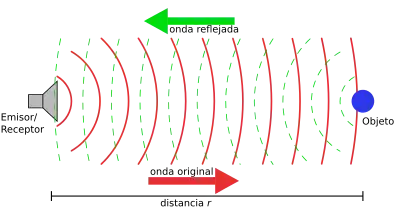
En navegación marítima es utilizado para detectar obstáculos y objetos bajo el agua mediante el sonar, este uso se extendió al aire aplicado en robots móviles.[28] Se genera un pulso ultrasónico en una dirección particular. Si hay un objeto en la ruta de este pulso, parte o la totalidad del pulso se reflejará de nuevo al transmisor como un eco y se puede detectar a través de la ruta del receptor. Al medir la diferencia de tiempo entre el pulso que se transmite y el eco que se recibe, es posible determinar la distancia.
El tiempo de viaje medido de los pulsos de sonda en el agua depende en gran medida de la temperatura y la salinidad del agua. El rango ultrasónico también se aplica para medir en el aire y para distancias cortas. Por ejemplo, las herramientas de medición ultrasónicas de mano pueden medir rápidamente el diseño de las habitaciones.
Identificación ultrasónica (USID)
La identificación por ultrasonido (USID) es un sistema de localización en tiempo real (RTLS) o tecnología de sistema de posicionamiento en interiores (IPS) que se utiliza para rastrear e identificar automáticamente la ubicación de los objetos en tiempo real utilizando nodos simples y económicos, unidos o integrados en objetos y dispositivos, que luego transmiten una señal de ultrasonido para comunicar su ubicación a los sensores microfónicos.
Sensores de movimiento y medición de flujo
Una aplicación de ultrasonido común es un abridor de puertas automático, donde un sensor ultrasónico detecta la proximidad de una persona y abre la puerta en respuesta. Los sensores ultrasónicos también se utilizan para detectar
en un habitáculo: el ultrasonido puede cubrir un área amplia desde un solo punto.
Por otro lado, el flujo en tuberías o canales abiertos se puede medir mediante medidores de flujo ultrasónicos, que miden la velocidad promedio del líquido que fluye.
En reología, un reómetro acústico se basa en el principio de la ecografía. En mecánica de fluidos, el flujo de fluidos se puede medir usando un medidor de flujo ultrasónico.
Otros
Una aplicación ineficaz y muy popularizada del ultrasonido consiste en su uso como repelente para insectos (especialmente de mosquitos). Existen aparatos y programas de software que permiten generar estas señales acústicas. FACUA pide retirar del mercado estos aparatos por publicidad engañosa, ya que existe multiplicidad de estudios que demuestran su ineficacia.[29]
Referencias
- «Principio de audición». PDF.
- «Tecnología de ultrasonidos | TELSONIC Ultrasonics». www.telsonic.com. Consultado el 3 de mayo de 2020.
- Ortega, Dulia; Seguel, Solange (2004). Historia del Ultrasonido: El Caso Chileno. doi:10.4067/S0717-93082004000200008. Consultado el 9 de septiembre de 2016.
- Martinez Rodriguez, Jairo Alejandro; Vitola Oyaga, Jaime; Sandoval Cantor, Susana del Pilar (21 de septiembre de 2006). «Fundamentos teórico-prácticos del ultrasonido». 30 de abril de 2007. Consultado el 9 de septiembre de 2016.
- Corso, John F. (1963). «Bone-Conduction Thresholds for Sonic and Ultrasonic Frequencies». ASAJ (en inglés) 35 (11): 1738. ISSN 0001-4966. doi:10.1121/1.1918804. Consultado el 3 de mayo de 2020.
- Takeda, Shintaro; Morioka, Ikuharu; Miyashita, Kazuhisa; Okumura, Akeharu; Yoshida, Yoshiaki; Matsumoto, Kenji (1 de noviembre de 1992). «Age variation in the upper limit of hearing». European Journal of Applied Physiology and Occupational Physiology (en inglés) 65 (5): 403-408. ISSN 1439-6327. doi:10.1007/BF00243505. Consultado el 3 de mayo de 2020.
- Vitello, Paul (12 de junio de 2006). «A Ring Tone Meant to Fall on Deaf Ears». The New York Times (en inglés estadounidense). ISSN 0362-4331. Consultado el 3 de mayo de 2020.
- «PRINCIPIOS FÍSICOS DEL ULTRASONIDO - Diplomadomedico.com». 25 de enero de 2016. Consultado el 25 de marzo de 2020.
- «[PDF] Ensayo de ultrasonidos - Free Download PDF». nanopdf.com (en inglés). Consultado el 12 de abril de 2020.
- «Algunos fenómenos acústicos: efecto Doppler, absorción, reflexión, refracción, transmisión, difracción, eco y reverberación». www.ehu.eus. Consultado el 3 de mayo de 2020.
- Elena Plaza Moreno (10 de octubre de 2015). "Principios básicos de ecografía clínica". S. Domenech y A. Gironés.. Consultado el 17 de mayo de 2020.
- Radiology (ACR), Radiological Society of North America (RSNA) and American College of. «Ultrasonido (Ecografía)». www.radiologyinfo.org. Consultado el 3 de mayo de 2020.
- Hangiandreou, Nicholas J. (1 de julio de 2003). «AAPM/RSNA Physics Tutorial for Residents: Topics in US». RadioGraphics 23 (4): 1019-1033. ISSN 0271-5333. doi:10.1148/rg.234035034. Consultado el 3 de mayo de 2020.
- «Practice Parameters». www.aium.org. Consultado el 3 de mayo de 2020.
- «Ultrasonido». calameo.com. Consultado el 3 de mayo de 2020.
- Marin, Nohely. Equipo de Ultrasonido Obstetrico (en inglés). Consultado el 3 de mayo de 2020.
- «El Hospital Clínico San Carlos obtiene la excelencia asistencial en ecocardiografía transesofágica».
- Journal (ed.). Ecografía de cuello, Tiroides, Paratiroides, Salivales, Ganglios linfáticos, Otras neoplasias.
- «Ecografía abdominal».
- «Uterine Ultrasound Characteristics and Steroid Correlation». web.archive.org. 31 de enero de 2009. Archivado desde el original el 31 de enero de 2009. Consultado el 3 de mayo de 2020.
- «Entendiendo el ultrasonido». Dr. Jerry Gresham – Univ. Tennessee.
- «Wayback Machine». web.archive.org. 12 de abril de 2007. Archivado desde el original el 12 de abril de 2007. Consultado el 3 de mayo de 2020.
- [«Does Ultrasound Work?» http://saveyourself.ca/articles/reality-checks/ultrasound.php]
- [«Ultrasound therapy for musculoskeletal disorders: a systematic review.» http://www.ncbi.nlm.nih.gov/pubmed/10431713]
- «Real Time Wireless Flood Monitoring System Using Ultrasonic Waves». International Journal of Science and Research (IJSR).
- «Ultra Sound Technology» (en inglés). Consultado el 3 de mayo de 2020.
- «Sonar». Marina santos perez.
- Elfes, A. (April 1986). «A sonar-based mapping and navigation system». 1986 IEEE International Conference on Robotics and Automation Proceedings 3: 1151-1156. doi:10.1109/robot.1986.1087534. Consultado el 17 de febrero de 2018.
| Control de autoridades |
|
|---|
 Datos: Q162564
Datos: Q162564 Multimedia: Ultrasound / Q162564
Multimedia: Ultrasound / Q162564