Caractéristiques du signal radar
Un système radar utilise un signal radio électromagnétique qui, en étant réfléchi par une cible, permettra d'obtenir des informations sur cette cible. Les signaux transmis et réfléchis vont présenter plusieurs des caractéristiques décrites ci-dessous.
Signal radar par rapport au temps

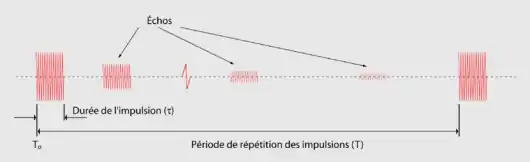
Le schéma ci-contre montre les caractéristiques du signal transmis par rapport au temps. Notons que dans ce schéma, ainsi que dans tous ceux de l'article, l'axe des abscisses (du temps) est dilaté par mesure de clarté.
Porteuse
La porteuse est un signal HF, habituellement dans les micro-ondes, qui est le plus souvent modulé (mais pas toujours) pour permettre au système d'acquérir les données nécessaires. Dans le cas des radars simples, la porteuse est modulée en une série d'impulsions. Dans le cas des radars à porteuse continue, comme le radar Doppler, le signal peut ne pas être modulé du tout.
La plupart des systèmes utilisent cependant la modulation par impulsions. La porteuse est alors simplement émise durant une courte période suivi d'un plus long intervalle de silence. Le tout est commandé par un interrupteur électronique qui laisse ou ne laisse pas passer la porteuse produite par l'oscillateur synchrone. L'enveloppe de modulation n'est pas réellement transmise, elle est reconstituée à la réception par démodulation. Ces impulsions peuvent dans certains systèmes subir une modulation supplémentaire (compression d'impulsion par exemple).
Durée de l'impulsion
La durée de l'impulsion du signal émis détermine des caractéristiques importantes d'un radar : la résolution horizontale (i.e. en distance) du sondage et la porté maximale et minimale du radar.





Résolution horizontale
La résolution en distance est la capacité d'un système radar à distinguer deux ou plusieurs cibles situées dans la même direction azimutale mais à des distances légèrement différentes. Elle dépend surtout de et accessoirement du type et de la taille des cibles, ainsi que de l'efficacité du récepteur et de l'afficheur. La résolution en distance est défini par:


où est la vitesse de la lumière et l'angle d'élévation du radar. En général, la valeur de étant faible, i.e. , la résolution en distance est équivalente à une demi-largeur d'impulsion[1]. En effet, c'est la distance que parcourt le front de l'impulsion vers le radar après avoir frappé une cible avant de rejoindre l'arrière de l'impulsion. Si à ce moment l'arrière de l'onde frappe une autre cible, il est impossible de distinguer les deux retours au site radar car ils y arriveront en même temps.



Distance minimale de sondage
Dans un radar mono-statique, c'est la même antenne qui émet l'impulsion et qui reçoit le retour de la cible. Pendant que l'émetteur est actif, le duplexeur dirige le signal vers l'antenne et coupe le guide d'ondes vers l'entrée du récepteur afin d'éviter que ce dernier ne soit saturé ou même détruit. À la fin de l'impulsion, le duplexeur commute le guide d'ondes vers le récepteur pour l'écoute. Pendant le temps de l'impulsion, le radar est donc sourd et ceci correspond à une distance autour du radar non sondée : la zone d'ombre notée . Cette dernière est égale au trajet aller-retour durant l'impulsion[2] :

Ainsi, si la durée de l'impulsion d'un radar est de 1 μs, on ne pourra pas détecter de cibles proches de moins de 150 mètres parce que le récepteur sera inactif.
Distance des cibles
La même équation que précédemment peut être utilisée pour calculer la distance entre le radar et la cible mais en remplaçant par la différence de temps entre l'émission de l'impulsion et son retour au radar. Par exemple, l'impulsion revenant d'une cible située à 1 km prendra 6,7 μs pour revenir, en comptant à partir du début de l'impulsion. Par commodité, on peut également exprimer cette mesure par rapport au mille marin (1 nmi=1,852 km), la durée est alors de 12,4 μs.

Fréquence de répétition des impulsions (PRF)
Pour obtenir un écho utilisable la plupart des systèmes radar émettent des impulsions de façon continue et la fréquence de répétition des impulsions (« PRF » pour Pulse repetition frequency) est fonction de l'usage que l'on fait du système. On définit de manière équivalente l'intervalle de répétition des impulsions ("PRI" pour Pulse Repetition Interval) comme étant l'inverse de . L'écho reçu de la cible peut être affiché directement sur un écran ou être intégré par un système de traitement du signal à chaque impulsion et être rendu ainsi plus lisible. Plus est élevée, plus l'image de la cible sera visible. Cependant, lorsqu'on augmente , on diminue la portée du radar. Les fabricants de radars essaient donc d'utiliser la fréquence la plus élevée possible compte tenu des facteurs limitants.


PRF décalée
Décaler revient à faire varier légèrement la période d'envoi des impulsions. Ce changement de la fréquence de répétition permet au radar de différencier ses propres retours de ceux d'un autre radar travaillant sur la même fréquence. Sans ce décalage, les retours de l'autre radar, apparaissant stables dans le temps, seraient confondus par notre radar avec ses propres retours. Grâce au décalage, les retours de notre radar paraitront stables par rapport à la porteuse émise, alors que les échos d'autres radars seront incohérents et rejetés par les systèmes de filtrage du récepteur.
Fouillis d'échos
Le fouillis radar ou fouillis d'échos, plus généralement appelés « échos parasites » (clutter en anglais), est une forme de parasitage du signal radar[3]. Ce phénomène apparait lorsque des objets fixes, proches du radar comme des immeubles, des arbres, des collines, des vagues en mer, etc., font écran au faisceau du radar et provoquent des échos de retour. On parle aussi d’échos de sol et de fouillis de mer[3]. Les échos résultants de ces fouillis peuvent être très importants, aussi bien du point de vue de l'étendue qu'ils couvrent que par leur puissance. Sans un traitement approprié, ce fouillis s'ajoute au retour des vraies cibles et peut faire disparaître ces dernières pour l'opérateur radar.
Ces effets diminuent lorsque la distance au radar devient plus grande en raison de la courbure terrestre et de l'inclinaison de l'antenne au-dessus de l'horizon. En effet, le faisceau radar, qui a une certaine largeur, s'élève graduellement au-dessus de la surface terrestre et intercepte de moins en moins de celle-ci. Cependant, dans les cas où la température de l'air n'est pas standard, comme pour une inversion de température, on aura de la surréfraction et le faisceau radar peut être recourbé vers la surface. Des échos de fouillis seront alors notés à plus grande distance du radar.
Les militaires utilisent des fouillis artificiels pour tromper les radars. Il s'agit de lâcher de petites particules réfléchissantes pour dissimuler des mouvements de troupes, de navires ou d'avions en provoquant de nombreux échos et en saturant ainsi le récepteur du radar par une grande quantité de fausses cibles. On appelle ces leurres des paillettes.
Commande de variation du gain en fonction du temps
La commande de variation du gain en fonction du temps (Sensitivity Time Control ou STC en anglais) sert à éviter la saturation du récepteur par des échos de sol ou de mer proches en atténuant l'entrée du récepteur de façon dynamique en fonction de la distance de l'objet. Plus l'objet est proche, plus l'atténuation est importante.
Ambigüité sur la distance
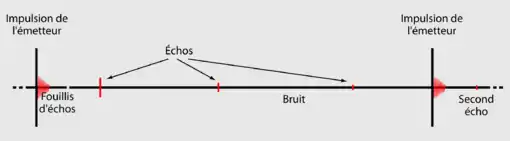
Dans les radars classiques, les échos doivent être détectés et traités avant que l'impulsion suivante ne soit émise. L'ambigüité sur la distance se manifeste lorsque le temps que met le signal pour faire l'aller–retour avec la cible est supérieur au temps d'écoute entre deux impulsions. Ces « échos de second retour » apparaîtront sur l'affichage comme des cibles plus proches qu'elles ne le sont en réalité. La distance maximale non ambigüe est donc obtenue par :

Par exemple, si l'antenne du radar est située à 15 m au-dessus du niveau de la mer, l'horizon se trouve assez près (environ 15 km). Les cibles au sol au-delà de cette distance seront donc invisibles et, du coup, pourra être élevée. Par exemple, un radar dont 7,5 kHz implique de par la précédente formule que 20 km. Si, on double à 15 kHz, la portée diminue de moitié, 10 km.




De manière générale, tous les échos se situant entre et seraient correctement placés par le premier taux de répétition. Cependant, dans le second cas, l'écho placé entre 10 et 20 km serait reçu après qu'une seconde impulsion aurait été émise par le radar et le système d'analyse lui donnerait une position erronées entre la zone d'ombre et 10 km. Ainsi une cible située à 12 km apparaitrait comme n'étant qu'à 2 km mais avec un signal dont la force serait très en dessous de ce qu'elle devrait être si la cible était réellement à cette distance.
Si on veut augmenter la portée utilisable de ces systèmes simples, il faut réduire en conséquence. Dans les premiers radars de surveillance il n'était pas rare de rencontrer des de l'ordre de 1 kHz ce qui permettait des portées exploitables de 150 km. Mais, diminuer fait apparaître de nouveaux problèmes comme la mauvaise représentation de la cible et une ambigüité sur la vitesse obtenue par les radar Doppler pulsés.
Les radars modernes utilisent des de plusieurs centaines de kilohertz et font varier la période entre les impulsions pour lever l'ambigüité et atteindre les portées souhaitées. Dans le cas de variables, un « paquet » d'impulsions est envoyé, l'intervalle de temps entre les impulsions de ce paquet ayant une longueur un peu différente du précédent et en décalage par rapport à la référence. À la fin du paquet, l'intervalle revient à sa valeur initiale conformément à la référence de la base de temps. Ces échos peuvent ensuite être corrélés avec l'impulsion T0 du paquet et être reconnus comme « vrais » pour le calcul de la distance si leur décalage temporel est bon. Les échos provenant des autres impulsions du paquet (échos fantômes) seront supprimés de l'affichage ou annulés par le traitement du signal. C'est un peu comme si le système donnait une étiquette à chacune des impulsions du paquet et vérifiait au retour quelle impulsion revient de la cible.
Signal radar et spectre de fréquences

Les radars qui ne fonctionnent qu'en onde entretenue apparaissent comme une ligne simple sur un analyseur de spectre, et quand ils sont modulés avec un autre signal sinusoïdal, leur spectre est peu différent de ce qu'on obtient avec une modulation analogique standard en télécommunications, comme la modulation de fréquence. Il se résume alors à une porteuse et à un petit nombre de bandes latérales. Quand un radar est modulé par un train d'impulsions, le spectre devient beaucoup plus compliqué et encore plus difficile à visualiser.
Une simple transformée de Fourier montre que n'importe quel signal répétitif complexe peut être décomposé en un certain nombre d'ondes sinusoïdales liées harmoniquement. Le train d'impulsions du radar est un signal carré composé de la fondamentale et de toutes les harmoniques impaires. La composition précise du train d'impulsions dépendra de la durée des impulsions et du taux de répétition de celles-ci : une analyse mathématique permet de calculer l'ensemble des fréquences du spectre.
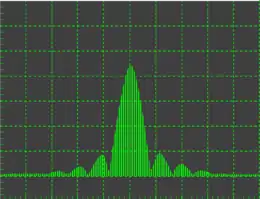
Quand on utilise un train d'impulsions pour moduler une porteuse radar, on crée une onde similaire à celle à droite et son spectre est tel que celui qui est présenté ici à gauche en dessous.
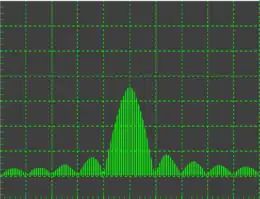
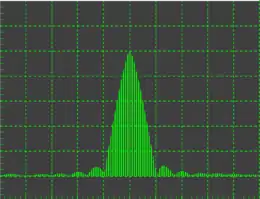
L'examen de cette réponse spectrale montre qu'elle contient deux structures de base : la structure élémentaire dont les pics (ou lobes) sont visibles sur le diagramme de gauche, et la structure fine qui contient les composantes individuelles de fréquence comme on peut le voir ci-contre à droite. La description de l'enveloppe des lobes dans la structure élémentaire est donnée par :

où est la fréquence d'émission du radar. On remarque que apparait à la fin de cette équation et détermine l'espacement des lobes. Une durée plus petite donnerait des lobes plus larges et, par conséquent, une plus grande bande passante de fréquences.

L'examen de la réponse spectrale fine, telle qu'on la voit sur le schéma de droite, montre que la structure fine comporte des lignes séparées ou raies de fréquence. La formule pour la structure fine est donnée par :

Comme se trouve dans la partie supérieure de la fonction, il y aura moins de raies si la période augmente. Les fabricants de radar doivent tenir compte de ces relations et de leur rapport avec les ambigüités de distance et vitesse mentionnés antérieurement, pour minimiser les effets sur le signal.
Profil de l'impulsion
Si les temps de montée et de descente des impulsions étaient nuls, les bords de l'impulsion seraient parfaitement verticaux et les bandes latérales seraient vues comme sur le schéma théorique ci-dessus. La bande passante résultant de cette transmission pourrait être très importante et la totalité de la puissance transmise serait répartie sur plusieurs centaines de raies spectrales. Ceci est une source potentielle d'interférence avec d'autres systèmes, et des défauts dans la chaîne d'émission signifient qu'une partie de la puissance mise en œuvre n'arrivera jamais à l'antenne. En réalité, il est bien sûr impossible d'obtenir des fronts parfaitement verticaux et en pratique les bandes latérales contiennent beaucoup moins de raies que dans un système idéal. Si on dégrade volontairement les fronts, la bande passante peut être limitée pour ne contenir que relativement peu de bandes latérales, et on réalise ainsi un système efficace présentant un minimum d'interférences potentielles avec l'environnement. Cependant, en dégradant les fronts des impulsions, la résolution de la distance devient moins bonne ce qui est la limite de ce système. Dans les premiers radars, on limitait la bande passante par l'adjonction de filtres dans la chaîne d'émission, mais la performance est par moments dégradée par des signaux non voulus car les fréquences des émissions à distance et la forme des fronts qui en découle ne sont pas connues. Un examen plus approfondi du spectre fondamental présenté ci-dessus montre que l'information contenue dans les différents lobes est la même que dans le lobe principal, donc en limitant la bande passante à l'émission et à la réception on obtient de bons résultats en matière d'efficacité et de réduction du bruit.
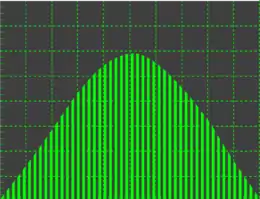
Les récentes avancées des techniques de traitement du signal ont permis d'utiliser couramment les techniques de mise en forme de l'impulsion. Par la mise en forme de l'enveloppe de l'impulsion avant qu'elle soit envoyée vers le système d'émission — disons mise en forme cosinus ou trapézoïdale — la bande passante peut être limitée à la source et être moins tributaire des filtres. Quand cette technique est associée à la compression d'impulsion on obtient un bon compromis entre l'efficacité, la performance et la résolution de la distance. Le diagramme à gauche ci-contre montre l'impact sur le spectre d'une impulsion de profil trapézoïdal. On constate que l'énergie dans les bandes latérales est significativement réduite au profit de celle du lobe principal.
Par l'usage d'une impulsion avec un profil cosinus on obtient un effet notablement meilleur avec une amplitude des bandes latérales presque négligeable et un lobe principal encore renforcé ; il s'agit donc d'une amélioration importante en matière de performance.
On peut adopter de nombreux autres profils d'impulsion pour optimiser les performances du système, mais les profils cosinus et trapézoïdaux se révélant un bon compromis entre l'efficacité et la résolution, ce sont eux qu'on rencontre le plus souvent.
Ambigüité sur la vitesse
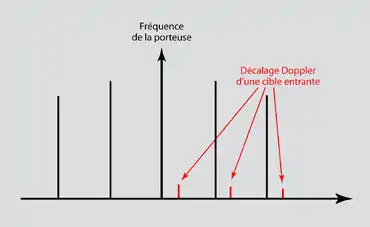
Ce problème n'apparait qu'avec un type particulier de radar, le radar Doppler pulsé qui est basé sur l'effet Doppler pour déterminer la vitesse radiale de la cible avec le décalage apparent de la fréquence pour les cibles qui se déplacent radialement par rapport au radar. L'étude du spectre généré par un émetteur pulsé montre que chaque bande latérale (aussi bien élémentaire que fine) est affectée par l'effet Doppler, ce qui donne une nouvelle bonne raison pour limiter la bande passante et la complexité spectrale par la mise en forme de l'impulsion.

Considérons le décalage positif d'une cible entrante sur le diagramme qui a été considérablement simplifié pour être clair. On peut observer que lorsque augmente, on atteint un point où les raies spectrales qui constituent les échos sont cachées ou intermodulées par la bande latérale suivante de la porteuse modulée (repliement de spectre). Pour lever cette ambigüité, on émet plusieurs paquets d'impulsions avec des différentes, ainsi à chaque nouvelle valeur de correspondra une nouvelle position de la bande latérale exprimant par rapport au récepteur. La vitesse maximale mesurable sans ambigüité est donnée par :


Paramètres de base
Si on veut prendre en considération toutes les caractéristiques que nous avons exposées il faut tenir compte d'un certain nombre d'impératifs dans la construction du radar. Par exemple, un système avec une fréquence porteuse de 3 GHz et une durée d'impulsion de 1 μs aura une période de porteuse d'environ 333 ps[4]. Chaque impulsion transmise comportera environ 3 000 cycles et les ambigüités sur la vitesse et la distance seront :
| PRF | Ambigüité sur la vitesse | Ambigüité sur la distance |
|---|---|---|
| Basse (2 kHz) | 30 m/s | 75 km |
| Moyenne (12 kHz) | 180 m/s | 12,5 km |
| Haute (200 kHz) | 3 000 m/s | 750 m |
Voir aussi
Articles connexes
- Radar
- Radar Doppler
- Radar Doppler pulsé
- Radar météorologique — pulsé avec un traitement Doppler
- Crénelage — la cause de l'ambigüité sur la vitesse
Lien externe
- (fr) Christian Wolff, « Les Principes du radar », (consulté le )
Références
Notes
- (en) Cet article est partiellement ou en totalité issu de l’article de Wikipédia en anglais intitulé « Radar signal characteristics » (voir la liste des auteurs).
- (fr) Christian Wolff, « Résolution en distance » [archive du ], (consulté le )
- (fr) Christian Wolff, « Calcul de la distance » [archive du ], (consulté le )
- (fr) Mérimée, ministère de la Culture et de la Communication - direction de l'Architecture et du Patrimoine., « Fouillis D'échos, Fouillis De Mer » [archive du ], Les mots, Patrimoine de France (consulté le )
- ps = picoseconde, soit 10-12 s.
 Portail de la physique
Portail de la physique  Portail de l’électricité et de l’électronique
Portail de l’électricité et de l’électronique