Gyrocompas
Le gyrocompas, ou compas gyroscopique, est un instrument de navigation indiquant le nord géographique indépendamment du champ magnétique terrestre. Il est constitué par un gyroscope dont l'axe de rotation est maintenu horizontal. La précession induite par la rotation de la Terre aligne alors l'axe de rotation du gyroscope sur l'axe des pôles. Il faut compter deux à quatre heures pour l'alignement (temps d'établissement).

Son déploiement comme instrument de navigation date du début du XXe siècle, avec le remplacement des navires en bois par des navires en métal qui rendait problématique l'usage de la boussole. Ils présentent une déviation systématique dépendant de la direction et de la vitesse du déplacement. De ce fait, les gyrocompas sont principalement utilisés sur des navires à faible vitesse.
Historique
Ernest Lamarle (1806-1875), professeur à l'Université de Gand, énonce le principe du gyroscope peu de temps avant Foucault[1]. C'est Léon Foucault qui utilisa le premier un gyroscope en 1852 pour démontrer la rotation de la Terre, le gyroscope conservant une orientation fixe par rapport au référentiel stellaire. C'est de cette expérience que le gyroscope tire son nom : l'instrument permet de voir (-scope) la rotation (gyro-) de la Terre.
- « L'expérience [de Foucault] comporte une forme peut-être plus décisive. Au lieu de laisser à l'axe du tore cette liberté complète d'orientation, fixons l'un à l'autre les anneaux A et B, de façon qu'il ne puisse plus se mouvoir que dans un plan horizontal : la tendance des axes de rotation au parallélisme va produire son effet. L'axe du tore se dirigera vers le plan du méridien, oscillera de part et d'autre un certain temps, et finira par s'y arrêter, la pointe tournée vers le nord étant celle d'où la rotation du tore serait vue s'effectuant de droite à gauche. Laissons au contraire les couteaux libres, et maintenons l'anneau B perpendiculaire au plan du méridien : l'axe du tore ne pouvant plus que se balancer dans ce plan, après quelques oscillations, ira se fixer dans la direction parallèle à l'axe du monde, et l'équilibre n'aura lieu, cette fois encore, que lorsque les rotations de la Terre et du tore se feront dans le même sens. Ainsi cet admirable instrument, en fournissant des signes sensibles de la rotation terrestre, peut même servir, en l'absence de la vue du ciel, à déterminer la direction de la méridienne et la latitude du lieu où se fait l'opération. »[2]
Cette expérience, extrêmement délicate parce que le gyroscope doit être soigneusement équilibré, suscite de nombreuses recherches. Plusieurs tentatives furent faites pour utiliser un gyroscope à la place d'un compas magnétique, avant d'arriver à la forme moderne du gyrocompas. En 1880, William Thomson (Lord Kelvin) tente de proposer un « gyrostat » à la marine britannique. En 1889, Arthur Krebs adapte un moteur électrique à un gyroscope marin Dumoulin-Froment, destiné à la marine française. Cela permis au sous-marin Gymnote de naviguer en ligne droite pendant plusieurs heures sous l’eau, ce qui lui permit de forcer un bloc naval en 1890.
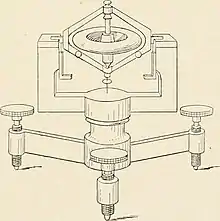
Dans la continuité de ces travaux, Louis-Philippe Gilbert invente en 1882 le barogyroscope[3], instrument démontrant la rotation de la Terre, plus simple et maniable que le pendule et le gyroscope de Foucault. Dans ce montage, l'axe du gyroscope tend à être ramené à la verticale par un contrepoids, ce qui permet des oscillations quand le gyroscope est à l'arrêt. Lorsque le gyroscope est lancé, le phénomène du pendule gyroscopique entraîne une déviation positive ou négative de cet axe, qui ne s'annule que lorsque le plan d'oscillation est perpendiculaire au méridien. L'idée d'un rappel par contrepoids est à la base des gyrocompas.

Une première forme de gyrocompas, encore malcommode[4], fut brevetée en 1885 par Marinus G. van den Bos (1885). Le premier modèle utilisable pour la navigation fut mis au point en 1906 en Allemagne par Hermann Anschütz-Kaempfe (brevet DRP n° 182855 du ) qui voulait atteindre le Pôle Nord en sous-marin[5]. Anschütz-Kaempfe fonda ensuite à Kiel la société Anschütz & Co. pour la production en série de gyrocompas ; la société s'appelle aujourd'hui Raytheon Anschütz GmbH.
Le même genre d'instrument fut aussi breveté aux États-Unis en 1908 par Elmer Ambrose Sperry (brevet n ° 1 242 065 de 1908) qui fonda la Sperry Gyroscope Company en 1910. Ce type de gyrocompas fut adopté par l’US Navy (1911) et joua un rôle majeur dans la Première Guerre mondiale.
L'exemple le plus fameux est l'appareillage en plein brouillard des deux croiseurs de bataille de l'Amiral Sturdee, les HMS Inflexible et HMS Invincible, qui doivent rejoindre au plus tôt les Iles Malouines, escale stratégique de ravitaillement en combustible dans l'Atlantique Sud, menacées par l'escadre allemande de Maximilian von Spee. Ce dernier vient d'anéantir l'escadre anglaise de l'Amiral Craddock lors de la Bataille de Coronel au large du Chili. Les compas magnétiques déréglés par de récents travaux de structure métallique sont inopérants et une "purée de pois" tenace règne sur le Solent , le bras de mer séparant la base navale de Portsmouth de l' Île de Wight. Elmer Sperry est précisément à Portsmouth pour proposer son Gyrocompas à l'amirauté britannique Il est tout d'abord éconduit par les décideurs anglais, qui se ravisent in extremis (il est déjà dans le train de Londres), et installent en toute hâte son système à bord du navire amiral...La sortie vers la haute mer se fera sans incidents (sinon sans tension nerveuse) et les deux navires de guerre, filant à toute vapeur, atteindront les îles Malouines quelques heures avant l'escadre allemande, lui infligeant une destruction quasi complète le 8 décembre 1914 lors de la bataille des Falklands. Sperry , débarqué par la vedette du pilote à la sortie des passes, conclura un avantageux contrat qui fera sa fortune.[6]
Sperry contesta le brevet d’Anschütz. Albert Einstein fut à cet effet commis auprès du tribunal des brevets pour effectuer une expertise. Anschütz gagna le procès.
Le gyrocompas était une invention importante pour la navigation maritime, car il permettait de déterminer avec précision la position d’un navire à tout moment, quels que soient son mouvement, les conditions météorologiques et la quantité d’acier utilisée dans sa construction. La plupart des marines du monde équipèrent leurs navires de compas de type Anschütz, sauf la marine britannique qui continua longtemps encore de se servir des boussoles inventées 40 ans plus tôt par William Thomson et qui devait ses commandes plus à son lobbying intense qu'à la qualité de son produit[réf. nécessaire]. Après un premier test concluant sur le USS Delaware, les navires de l'US Navy en furent équipés.
Principe de fonctionnement

Un gyroscope libre est monté de manière que son essieu puisse s'orienter dans n'importe quelle direction. En raison de la loi de conservation du moment cinétique, une roue dans cette situation conservera son orientation d'origine. Étant donné que la Terre tourne, si l'axe de rotation de la roue n'est pas l'axe de rotation de la Terre, il semblera que l'axe du gyroscope tourne une fois toutes les 24 heures pour un observateur immobile sur Terre. Cependant, un gyroscope tournant de cette manière ne peut pas être utilisé en navigation. L'ingrédient supplémentaire crucial nécessaire est un mécanisme qui applique un couple lorsque l'axe du gyroscope ne pointe pas vers le nord.
Une méthode possible est d'utiliser un frottement pour appliquer le couple nécessaire : le gyroscope n'est donc pas totalement libre de se réorienter. Si, par exemple, un dispositif connecté à la tige est immergé dans un fluide visqueux, alors ce fluide résistera à la réorientation de la tige. Ce moment généré par la friction provoquée par le fluide est parallèle à l'axe de rotation de la Terre. Il aura un effet nul dans la direction de rotation du gyroscope, seule la composante orthogonale à cette rotation (et dans le plan commun des deux rotations) entraîne un couple agissant sur l'arbre, le faisant tourner dans le plan commun vers le nord géographique (l'étoile polaire). Une fois que l’axe pointe au nord, il apparaîtra immobile et ne subira aucune force de friction. En effet, le nord géographique est la seule direction pour laquelle le gyroscope peut rester sur la surface de la Terre sans être contraint de changer. Ceci est considéré comme un point d'énergie potentielle minimum.
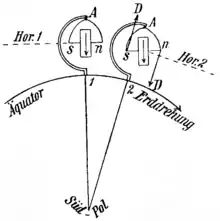
Dans le schéma ci-contre, le principe de fonctionnement est sensiblement le même : alors que le gyroscope tendrait à rester fixe par rapport aux étoiles, le déplacement de son support terrestre déséquilibre la tension des deux fils et entraîne un moment le faisant tourner vers le plan méridien. Une autre méthode plus pratique consiste à utiliser des poids pour forcer l'axe du gyroscope à rester horizontal par rapport à la surface de la Terre, tout en lui permettant de tourner librement dans ce plan. Dans ce cas, la gravité appliquera un couple, forçant l’axe gyroscopique à faire face au nord. Parce que les poids limiteront l'axe à l'horizontale par rapport à la surface de la Terre, il ne pourra jamais s'aligner sur l'axe de la planète (sauf à l'équateur) et il doit être réaligné lorsque la Terre tourne. Mais en ce qui concerne la surface de la Terre, le gyroscope semblera être stationnaire et pointant à côté de la surface de la Terre en direction du pôle nord géographique.
Le schéma de la figure 2, vu du pôle sud, montre un gyroscope se déplaçant le long de l'équateur. Au départ, son axe de rotation s-n est parallèle à la surface de la Terre. Selon la conservation du moment cinétique, l'axe conserve sa direction même lorsqu'il se déplace vers la deuxième position indiquée. Mais à cause de la suspension spéciale, le gyroscope ne peut tourner librement que suivant la verticale. La force de gravité tend à incliner l'axe le long des flèches marquées D. Le couple généré par celui-ci fait basculer l’axe de rotation hors du plan du dessin et fait précéder le gyroscope. En amortissant le mouvement de rotation autour du point A, le gyroscope finit par s’immobiliser lorsque le couple devient nul, c'est-à-dire lorsque l'axe du gyroscope pointe dans la direction nord-sud.
Cet effet est maximal à l'équateur et varie en suivant la latitude. À proximité des pôles, le gyrocompas ne peut plus fonctionner car l’axe de rotation de la Terre y est presque vertical, et le couple projeté sur le plan horizontal devient très faible. Ces problèmes ont conduit au développement de compas à trois rotors.

Déviations du gyrocompas
La précession du gyrocompas vient de ce que l'axe de rotation du gyroscope, initialement horizontal au lancement de l'appareil, s'est écarté de l'horizontale à la suite de la rotation de la Terre, induisant un couple de rappel (accélération angulaire) proportionnel à l'écart. Mais le gyroscope tend à maintenir son écart à l'horizontal dans cette précession, et au premier ordre, cet écart à l'horizontale s'accroît proportionnellement au temps (avec la rotation terrestre) et au sinus de l'angle entre l'axe et le plan méridien. Lorsque le gyrocompas finit par s'aligner avec le méridien, cet écart passe donc par un maximum ; le couple de rappel est donc également maximal en ce point, et continue à faire tourner le gyrocompas au-delà de son point d'équilibre, l'écart à l'horizontale se réduisant alors progressivement. Qualitativement, la représentation de ce mouvement dans l'espace des phases montre qu'il est périodique s'il n'est pas amorti. Les oscillations lentes ainsi générées dépendent de la construction de l'appareil, et sont typiquement de l'ordre de l'heure (84,4 minutes, voir ci-dessous). Il est donc indispensable d'amortir ce régime d'oscillations. Si le taux d'amortissement est réglé pour donner aux oscillations un régime critique, le temps d'amortissement est sensiblement de l'ordre de la période pour des petits écarts.
Outre ces oscillations, l'alignement du gyrocompas doit faire l'objet de deux corrections, l'une due à la latitude du navire, et l'autre purement géométrique due à sa vitesse.
La première correction, fonction de la latitude , vient de ce que le plan méridien suivant la rotation de la Terre il reste nécessaire de faire tourner l'axe du gyroscope pour le maintenir dans ce plan (sauf au voisinage de l'équateur). Dans son plan de rotation, le gyroscope voit une composante proportionnelle à , qu'il doit suivre en maintenant un écart à l'horizontale proportionnel, lequel correspond donc à un écart compensatoire (en ) par rapport au plan méridien. Globalement cet écart est donc proportionnel[7] à ; le rapport de proportionnalité dépendant de la force de rappel du contrepoids, et donc de la construction de l'appareil. Il est possible d'annuler cet écart en décalant le contrepoids pour équilibrer le moment nécessaire pour une latitude donnée, mais ce réglage dépend alors lui-même de la latitude.





D'autre part, l’exploitation d’un gyroscope dépendant essentiellement de sa rotation sur Terre, elle ne fonctionnera pas correctement si le navire sur lequel il est monté se déplace rapidement. Les mouvements du gyroscope le long d'un méridien (projetés en ) provoquent une déviation géométrique, parce que la combinaison de ce mouvement et de celui induit par la rotation terrestre (en ) est une nouvelle rotation dont l'axe ne se confond pas nécessairement avec l'axe de rotation de la Terre. Le gyroscope ne pointe plus exactement vers le nord, mais dans la direction qui résulte de la combinaison des deux rotations, dépendant de la latitude (cos) à la surface de la Terre et de la vitesse à laquelle le gyroscope est déplacé. D'où une seconde correction[7] de la forme . Une vitesse le long du méridien de 20 km/h provoque une déviation de seulement 0,5°. À 150 km/h, cette déviation monte à 5°.



Une troisième source théorique de déviation balistique vient des changements de vitesse ou de direction du navire. Ces changements correspondent à une accélération, qui induisent un écart à l'horizontale du gyroscope, et la force de rappel tend alors à le faire dévier du plan méridien. On compense cet effet en donnant au gyrocompas une période d'oscillation importante[7]. En 1923, Max Schuler publia un article montrant que si un gyrocompas vérifiait l'« accord de Schuler »[8] en ayant une période d'oscillation de 84,4 minutes (qui est la période orbitale d'un satellite théorique en orbite autour de la Terre au niveau de la mer), il pourrait être rendu insensible aux mouvements latéraux et maintenir la stabilité directionnelle. Dans cette construction, l'écart angulaire induit par une accélération balistique correspond à la différence de déviation géométrique entre les deux régimes de marche, et la correction géométrique applicable au nouveau régime de marche peut donc être appliquée immédiatement[9]
Notes et références
- Jean Mawhin, « Les fondements de la mécanique en amont et en aval de Poincaré. : Réactions belges à l’expérience du pendule de Foucault », Philosophiques, vol. 31, no 1, , p. 11–38 (lire en ligne, consulté le )
- Louis-Philippe Gilbert, Les preuves mécaniques de la rotation de la terre. In Bulletin des sciences mathématiques et astronomiques 2e série, tome 6, no 1 (1882), p. 189-223.
- Philippe Gilbert, Sur les expériences propres à manifester la rotation de la terre, (lire en ligne), P 109-112
- Dag Pike, The History of Navigation, Pen and Sword Books, (ISBN 9781526731692), « 4. Heading in the right direction ».
- Ce ne fut réalisé que le par le USS Nautilus (SSN-571). Une tentative antérieure, l'Expédition arctique du Nautilus (1931) avait échoué à 800 km du Pôle.
- Jacques MORDAL, 25 siècles de Guerre sur mer, Paris, Marabout Université, , 286 p.
- Les Compas gyroscopiques -- suite et fin. Bogaert, E. W. Ciel et Terre, Volume 36. Bulletin de la Société Belge d'Astronomie, Brussels, 1920, p.157
- Schuler tuning characteristics in navigational instruments. Walter Wrigley, December 1950
- The Anschutz Gyro-Compass and Gyroscope Engineering. Anschutz, Watchmaker Publishing, 2003.
Voir aussi
Bibliographie
- Steady as she goes" (en anglais), de A.E. Fanning, Nationa Maritime Museum, 1986. L'histoire du département des compas de l'Amirauté britannique.
Articles connexes
Liens externes
- Le centenaire de la société Anschütz & Co. (en allemand, sur le site internet de la ville de Kiel : http://www.kiel.de/kultur/stadtarchiv/erinnerungstage/index.php?id=42)
- « L'invention du compas gyroscopique », sur transpolair.free.fr (consulté le )
- Le fonctionnement d'un gyrocompas.
 Portail de la physique
Portail de la physique  Portail du monde maritime
Portail du monde maritime  Portail de l’aéronautique
Portail de l’aéronautique