Contact de Hertz
En génie mécanique et en tribologie, le contact de Hertz est une description, due à Heinrich Rudolf Hertz (dont le nom est également associé à l'unité SI de fréquence, le hertz), de la contrainte au sein de deux objets élastiques en contact. La description du contact de Hertz, obtenue en 1880[1] et publiée en 1881[2], s'applique au contact de deux sphères de rayons différents[3].

Généralités
Le contact de Hertz se réfère aux contraintes localisées qui se développent lorsque deux surfaces courbes viennent en contact et se déforment légèrement sous l'action des forces appliquées. Le degré de déformation dépend de l'élasticité du matériau en contact, autrement dit, de son module élastique. La théorie du contact de Hertz fournit la contrainte dans la zone de contact en fonction de la force normale appliquée, des rayons de courbure des deux corps et de leur module d'élasticité.
Dans les engrenages et les roulements en mouvement, ces forces de contact sont cycliques. Avec le temps, elles entraînent une fatigue du matériau et l'apparition de fissures sous la surface.
La théorie du contact de Hertz constitue le fondement des équations pour le calcul du chargement admissible pour les roulements, les engrenages et autres pièces dont deux surfaces sont en contact.
Résultats essentiels
Nous présentons pour commencer l'essentiel de la théorie de Hertz. Le lecteur intéressé par des équations complètes précises les trouvera dans le formulaire en fin d'article.
Prenons la situation simple d'une sphère et d'un plan (limite où l'une des sphères est de rayon infini). L'enfoncement de la sphère dans le matériau élastique augmente avec la force compressive appliquée, comme dans toute situation d'élasticité. Mais dans le cas du contact de Hertz, deux résultats importants sont non triviaux et constituent l'intérêt de cette théorie.
Surface de contact
Le premier résultat important est que la surface de contact augmente avec l'enfoncement. Cela est dû essentiellement à la géométrie : le contact est initialement ponctuel, et il s'élargit au fur et à mesure de l'enfoncement. Lorsque la sphère s'enfonce, son intersection avec le plan initial est un disque dont le rayon a vérifie :
- ,

où est l'enfoncement, et le rayon de la sphère.


Réponse non linéaire
Le second résultat non trivial est que bien que la loi de comportement de la matière soit linéaire (loi de Hooke), la relation entre la force appliquée et l'enfoncement ne l'est pas :

- .

La raison essentielle en est justement que l'aire de la surface de contact entre la sphère et le plan augmente au cours de l'enfoncement. Tout calcul fait (voir plus bas), le rayon de la zone de contact varie comme :

- .

Estimation de l'énergie élastique
Tous les calculs sont menés sous forme d'ordre de grandeur, sans tenir compte des facteurs numériques.
Déformation du matériau
Lors d'un enfoncement de avec une aire de contact de rayon (avec ) la déformation est de l'ordre de :


- .

La région dans laquelle la déformation du matériau est de l'ordre de δ/a a un volume de l'ordre de
- .

Énergie élastique
L'énergie élastique par unité de volume pour une déformation s'écrit

- .

où est le module de Young du matériau.

L'énergie élastique totale s'obtient par intégration. Ici, son ordre de grandeur est donné par le produit de la densité maximale d'énergie élastique par le volume fortement déformé :
- .

En combinant avec la relation géométrique , on obtient :
- .

Estimation de la force, de l'enfoncement et de la taille de la zone de contact
Ici encore, tous les calculs sont menés sous forme d'ordre de grandeur, sans tenir compte des facteurs numériques.
La force s'obtient à partir de l'énergie en dérivant par rapport au déplacement (voir l'article Travail d'une force) :

- .

Inversement, l'enfoncement s'écrit :
- .

En utilisant la relation géométrique , on obtient la taille de la zone de contact :
- .

Résultat complet
Le calcul complet fournit :

où est le module de Young renormalisé par le coefficient de Poisson ν :

- .

Esquisse du calcul complet pour une sphère et un plan
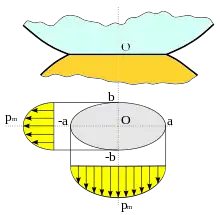
Le profil de pression exercé entre les deux objets au sein de leur disque de contact est schématisé sur la figure : il est maximal au centre du contact et décroît lorsqu'on s'éloigne du centre, jusqu'à s'annuler au bord du contact. Dans ce paragraphe, nous indiquons les grandes lignes du calcul permettant d'obtenir le profil de pression exact ainsi que la déflexion exacte de la surface initialement plane.
Lien entre un profil de pression et un profil de déflexion
Une force ponctuelle exercée à la surface du plan (supposé horizontal pour fixer les idées) donne lieu à une déflexion verticale très profonde (infinie, en principe) au point d'application de la force. Cette déflexion décroît à mesure que l'on s'écarte (distance horizontale ) du point d'application. Cette déflexion verticale a été décrite par Joseph Boussinesq comme :


- .

En réalité, la force totale F est répartie sur une certaine surface, sous la forme d'une pression qui dépend de la position dans la surface de contact. Par conséquent, chaque élément de pression contribue à la déflexion . Ainsi, en un point quelconque du plan (pas nécessairement à l'intérieur du contact), la déflexion est la somme des contributions de tous les éléments de pression situés dans la surface de contact, via la relation de Boussinesq citée plus haut :





- ,

où est la distance entre le point d'application de l'élément de pression et le point où l'on observe la déflexion.

- Remarque
- en termes mathématiques, l'intégration effectuée pour obtenir le profil de déflexion constitue ce qu'on appelle la convolution du profil de pression et de la réponse de Boussinesq à une force ponctuelle.
Profil de Hertz
La réponse de Boussinesq étant connue, le travail de Hertz a consisté à découvrir le bon profil de pression pour obtenir un profil de déflexion qui coïncide, dans la zone de contact, circulaire et de rayon , avec le profil de la sphère de rayon enfoncée d'une distance , c'est-à-dire :

- , pour .


Puisque l'ensemble du système est symétrique autour de l'axe vertical passant par le centre de la sphère, le profil de pression est axisymétrique, et nous le notons donc désormais . Hertz a montré que ce profil de pression s'écrit :

- ,

avec
- et
- .


- Remarque
- Le profil de déflexion en dehors de la zone de contact se raccorde au plan horizontal non déformé lorsque la distance au centre , tend vers l'infini :
- , pour .



Force exercée
La force ainsi exercée n'est autre que l'intégrale du profil de pression :
- .

Formulaire
Contact entre deux sphères
Soient deux sphères repérées 1 et 2, de rayons respectifs et , et de matériaux dont les modules de Young respectifs sont et et les coefficients de Poisson et .






La zone de contact est un disque de rayon a :

où est le module de Young renormalisé par le coefficient de Poisson :


- .

L'écrasement des sphères vaut :
- .

La pression maximale est au centre de la zone et vaut
- .

Appelons l'axe normal au plan de contact, dont l'origine est entre les sphères. Le long de cet axes, les contraintes principales varient avec la profondeur et valent :

- , identique pour les deux sphères.


La contrainte de cisaillement maximal vaut
- .

Sa valeur maximale vaut à peu près

et se situe sous la surface, pour une cote
- .

C'est dans cette zone que débute en général la fatigue.
- Remarque
- Pour un contact sphère/plan, il suffit de prendre , soit . Pour un contact sphère dans une calotte concave, il suffit de prendre .



Contact extérieur entre deux cylindres d'axes parallèles
On utilise des notations similaires au cas précédent.
Soient deux cylindres repérées 1 et 2, de même longueur , de diamètres respectifs et , et de matériaux dont les modules de Young respectifs sont et et les coefficients de Poisson et . La normale du contact est l'axe et les axes des cylindres sont parallèles à l'axe .



La zone de contact est un rectangle de longueur et de largeur :


- .

La pression maximale est sur la ligne parallèle aux axes des cylindres et située au milieu de la zone et vaut
- .

Les contraintes principales le long d'une normale passant par cette ligne valent :
- , identique pour les deux cylindres
- , identique pour les deux cylindres.



La contrainte de cisaillement maximal est τZX, sa valeur maximale vaut à peu près

et se situe sous la surface, pour une cote
- .

- Remarque
- Pour un contact cylindre/plan, il suffit de prendre . Pour un contact cylindre dans un cylindre creux (par exemple palier lisse), il suffit de prendre .


Notes et références
- (en) K. L. Johnson, Contact mechanics, Cambridge University Press, , 452 p. (ISBN 978-0-521-34796-9, lire en ligne), p. 90
- (de) Heinrich Hertz, « Über die Berührung fester elastischer Körper (Sur le contact entre corps élastiques) », J. für reine und angewandte Mathematik, vol. 92, , p. 156-171 (lire en ligne)
- Afin de contextualiser ce travail remarquable pour un étudiant de seulement 23 ans, signalons cependant que Joseph Boussinesq avait, deux ans auparavant, publié la solution de plusieurs cas particuliers de ce problème, solutions reprises dans sa Théorie des potentiels.
Voir aussi
Logiciel
- Hertz Calculator, un logiciel gratuit qui calcule la théorie de Hertz.
Articles connexes
- même situation, mais avec en outre l'énergie d'adhésion : Théorie JKR (1971)
- Cône hertzien formé par contact de Hertz au-delà d'une intensité critique.
- Tribologie - Contacts localisés
- Roulement mécanique
- Résistance au roulement
- Pression diamétrale
 Portail du génie mécanique
Portail du génie mécanique