Diagramme de Bode
Le diagramme de Bode est un moyen de représenter la réponse en fréquence d'un système, notamment électronique.
Hendrik Wade Bode, des Laboratoires Bell, a proposé ce diagramme pour l'étude graphique simple d'un asservissement et de la contre-réaction dans un dispositif électronique. Il permet de visualiser rapidement la marge de gain, la marge de phase, le gain continu, la bande passante, le rejet des perturbations et la stabilité des systèmes à partir de la fonction de transfert.
Définition
Le diagramme de Bode d'un système de réponse fréquentielle se compose de deux tracés :

- le gain (ou amplitude) en décibels (dB). Sa valeur est calculée à partir de .
- la phase en degré, donnée par


L'échelle des pulsations est logarithmique et est exprimée en rad/s (radian par seconde). L'échelle logarithmique permet un tracé très lisible, car construit à partir de tronçons de ligne droite.

Tracé asymptotique des systèmes analogiques
Prenons une fonction de transfert quelconque qui s'écrit de la façon suivante :

où

Bien qu'une fonction de transfert puisse s'écrire de plusieurs façons, c'est de la façon décrite ci-dessus qu'il faut les écrire :
- les termes constants des polynômes élémentaires du premier et du second degré doivent valoir . Pour cela utiliser la constante .
- Les termes en des polynômes élémentaires du premier et du second degré doivent être au numérateur. (voir la réécriture de la fonction Passe-haut ci-dessous)



On remarque que le module de est égal à la somme des modules des termes élémentaires en raison du logarithme. Il en va de même pour la phase, cette fois en raison de la fonction argument. C'est pourquoi on va dans un premier temps s'intéresser aux diagrammes de Bode des termes élémentaires.

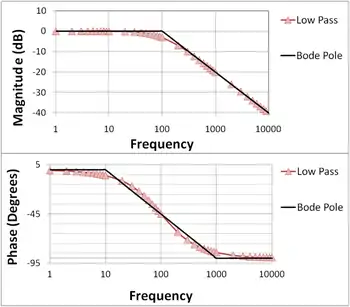
Passe-bas
- Définition
Soit la fonction de transfert :

La pulsation est appelée pulsation de coupure.

- Tracé asymptotique
Pour donc et .



Pour donc et .



Dans un repère logarithmique, se traduit par une pente de -20 dB/décade ou encore -6 dB/octave. On parle également de pente -1. Le diagramme de Bode asymptotique du module se résume donc à deux tronçons linéaires.

- Tracé réel
en , soit : la courbe passe 3 dB en dessous du point de coupure.


Passe-haut

Soit la fonction de transfert :

Le tracé s'obtient en prenant l'opposé du module en dB et de la phase du passe-bas.
Passe-bas
- Définition
Un système du second ordre de type passe bas est caractérisé par une fonction de transfert du type :

est le gain statique. La pulsation est appelée pulsation propre et est l'amortissement.


- Tracé asymptotique et Courbe réelle
Dans cette partie on prend le gain statique est égal à 1. Le tracé asymptotique dépend de la valeur de l'amortissement. On distingue trois cas :

Les pôles de la fonction de transfert sont réels (et négatifs pour assurer la stabilité), et le système se décompose en un produit de deux fonctions de transfert du 1er ordre.Soit et les pôles réels de la fonction de transfert :



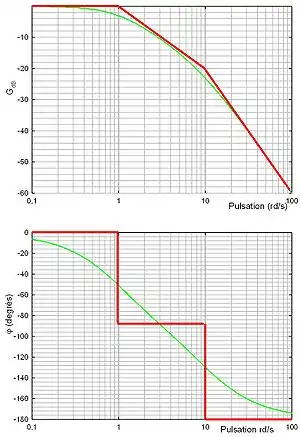


Les pôles sont réels, négatifs et égaux (pôle double). Si est un pôle double de la fonction de transfert, on obtient :


Pour donc et .

Pour donc et .



Dans un repère logarithmique, se traduit par une pente de -40 dB/décade ou encore -12 dB/octave. On parle également de pente -2. Le diagramme de Bode asymptotique du module se résume donc à deux tronçons linéaires.

Le diagramme asymptotique est le même que dans le cas précédent. Les pôles de la fonction de transfert sont complexes et conjugués, à partie réelle négative. Lorsque , le système présente une résonance. Le maximum du module de la fonction de transfert est alors en . La pulsation correspondant au maximum est donc toujours inférieure à .







Passe-haut

Le tracé s'obtient en prenant l'opposé du module en dB et de la phase du passe-bas.
Retour au cas général
Comme nous l'avons fait remarquer plus haut, on pourrait additionner tous les diagrammes de Bode des termes élémentaires pour obtenir le diagramme de la fonction de transfert .
Cependant, lorsque cette fonction de transfert est compliquée, il est plus facile de prendre en compte les contributions de chaque terme au fur et à mesure en faisant croître la pulsation .

Au début, lorsque , l'asymptote du module est une droite de pente q (q*20 dB/Décade) et la phase est constante à . Par la suite, à chaque fois que l'on rencontre une pulsation, on modifie le tracé selon la procédure suivante :


- Pour on rajoute +2 à la pente du module (+40 dB/Décade) et à la phase.
- Pour on rajoute +1 à la pente du module (+20 dB/Décade) et à la phase.
- Pour on rajoute -2 à la pente du module (-40 dB/Décade) et à la phase.
- Pour on rajoute -1 à la pente du module (-20 dB/Décade) et à la phase.








Tracé des systèmes numériques
Limitation du domaine des pulsations
Nous disposons cette fois d'une fonction de transfert d'un système discret.

Pour obtenir son diagramme de Bode, il faut évaluer la fonction sur le cercle unité.
Autrement dit, avec (on obtient le cercle complet par symétrie).


Si le système discret a été obtenu à partir de l'échantillonnage à la période T d'un système continu, alors avec .


De plus, les relations et ne sont pas rationnelles en . Par conséquent, l'étude du tracé est compliquée et nécessite des moyens informatiques.



Transformation bilinéaire
Cependant, il existe une application permettant de se ramener au cas continu :

ou la fonction réciproque

Il s'agit d'une transformation de Möbius.
Cette transformation fait correspondre l'axe imaginaire du domaine continu avec le cercle unité du domaine discret avec : en effet en posant , alors qui est un complexe divisé par son conjugué, donc de module 1. Il s'écrit également , donc l'argument de est la moitié de l'argument de modulo : .









Or, lorsque , on a , auquel cas on se retrouve dans le cas continu d'une fraction rationnelle à étudier. On peut alors se ramener à une étude classique des systèmes analogiques sur en sachant que les valeurs du diagramme près de sont entachées d'une erreur.



Voir aussi
 Portail de l’électricité et de l’électronique
Portail de l’électricité et de l’électronique