Méthode saute-mouton
En mathématiques, la méthode saute-mouton ou leap-frog est une méthode pour la résolution numérique des équations différentielles de la forme
- ,

ou, de manière équivalente, de la forme
- ,

en particulier dans le cas d'un système dynamique de la mécanique classique.
La méthode est connue sous différents noms dans différentes disciplines. En particulier, elle est semblable à la méthode de Verlet avec la vitesse, mais elle en diffère par un calcul de la vitesse et de la position à un décalage d'un demi-pas, d'où son nom de saut de grenouille.
Description mathématique et formules de récurrence
La méthode saute-mouton est une méthode du deuxième ordre, contrairement à la méthode d'Euler qui est du premier ordre, mais nécessite pourtant le même nombre d'évaluations par pas. Contrairement à la méthode d'Euler, le schéma saute-mouton est stable pour un mouvement oscillatoire, tant que le pas de temps t est constant, et pour [1].

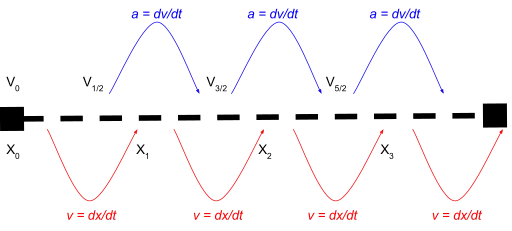
Dans le schéma saute-mouton, les relations de récurrence sur la position et la vitesse sont :

où xi est la position à l'étape i, où vi+1/2 est la vitesse (c'est aussi la dérivée première de x à l'étape i), où a est l'accélération (c'est aussi la dérivée de la vitesse) et est la durée de chaque pas de temps.

Ces équations peuvent être exprimées dans une forme qui donne de la vitesse au pas entier suivant[2] :

Cependant, même dans cette forme où les valeurs ont été "synchronisées", c'est-à-dire que l'on obtient leur valeur au même instant, le pas de temps t doit être constant pour maintenir la stabilité[3].
Cas pratiques d'utilisation de ce schéma
Il y a deux avantages principaux à la méthode saute-mouton lorsqu'elle est appliquée à des problèmes de mécanique. Le premier est la réversibilité temporelle du schéma saute-mouton. On peut l'intégrer en avant n étapes, puis inverser le sens de l'intégration et de travailler à reculons sur n pas pour arriver à la position de départ.
La deuxième force de ce schéma numérique est qu'il conserve l'énergie mécanique des systèmes dynamiques (saute-mouton connaît à la fois la position et la vitesse du point). Ceci est particulièrement utile lors des calculs de mécanique orbitale, sachant que d'autres schémas (même ailleurs plus efficaces comme la méthode de Runge-Kutta d'ordre 4) ne conservant pas l'énergie mécanique, ils divergeront plus facilement que saute-mouton sur ces problèmes particuliers.
En raison de son temps de réversibilité, et parce qu'il est un intégrateur symplectique, la méthode saute-mouton est également utilisée dans le Hamiltonien de Monte-Carlo, une méthode d'élaboration des échantillons aléatoires à partir d'une distribution de probabilité dont la loi globale est inconnue[4].
Voir aussi
Références
- C. K. Birdsall and A. B. Langdon, Plasma Physics via Computer Simulations, McGraw-Hill Book Company, 1985, p. 56.
- 4.1 Two Ways to Write the Leapfrog.
- [Skeel, R. D., "Variable Step Size Destabilizes the Stömer/Leapfrog/Verlet Method", BIT Numerical Mathematics, Vol. 33, 1993, p. 172–175.
- Christopher Bishop, Pattern Recognition and Machine Learning, New York, Springer-Verlag, , 548–554 p. (ISBN 978-0-387-31073-2).
Liens externes
- The leapfrog Integrator, Université de Physique de Drexel, Philadelphie.
 Portail des mathématiques
Portail des mathématiques