Simplification des problèmes plans
La modélisation de l'espace réel s'effectue généralement en trois dimensions. En particulier, la mécanique du solide considère des objets volumiques dans un espace à trois dimensions. Dans certaines conditions, on peut toutefois se ramener à une étude dans un espace à deux dimensions : c'est la simplification des problèmes plans.
Pour les articles homonymes, voir Simplification.
Simplification des problèmes plans en statique
Statique plane du point
Un problème de statique du point est plan si tous les vecteurs force sont coplanaires. Le plan d'étude est alors le plan affine contenant le point matériel considéré et dont la direction est le plan vectoriel des forces.
Dans le cas d'un problème à plusieurs corps, tous les points matériels doivent être dans ce plan.
Statique plane du solide
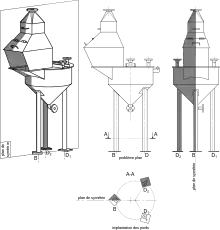

En statique, on peut se ramener à un problème plan lorsque le problème présente des symétries :
- un plan de symétrie pour les corps étudiés ; il s'agit d'une symétrie géométrique, mais aussi de répartition des masses (le centre de gravité global doit être situé dans ce plan) ;
- une symétrie de chargement : les forces sont réparties de manière symétrique par rapport à ce plan.
Dans ces conditions, on peut se placer dans le plan de symétrie : on considère les projections
- des centres de gravité des solides ;
- des points d'application des forces ;
- des vecteurs force ;
et les moments de forces peuvent être représentés par des scalaires (valeurs algébriques) ; les vecteurs moment sont perpendiculaires au plan d'étude.
Habituellement, le plan d'étude est le plan (O, x, y). Les réductions des torseurs statiques sont donc de la forme :

On remplace parfois les zéros par des tirets, pour mettre en évidence que ces valeurs sont fixées à 0 et ne peuvent prendre aucune autre valeur :

Mouvement plan
Cinématique du point plane
En cinématique de point, le problème est plan si la trajectoire du point est une courbe plane. Le plan d'étude est alors le plan contenant la trajectoire.
Cinématique du solide plane
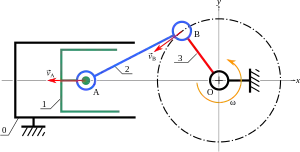
En cinématique, on peut se ramener à un problème plan lorsque tous les vecteurs vitesse sont dans un plan vectoriel. Le plan d'étude est alors un plan quelconque dont la direction est le plan des vecteurs vitesse.
On peut alors projeter tous les points — et notamment les trajectoires — et vecteurs vitesse sur ce plan. Les vitesses angulaires et accélérations angulaires peuvent être représentés par des scalaires (valeurs algébriques) ; les vecteurs vitesse angulaire et accélération angulaire sont perpendiculaires au plan d'étude.
Habituellement, le plan d'étude est le plan (O, x, y). Les réductions des torseurs cinématiques sont donc de la forme :

On remplace parfois les zéros par des tirets, pour mettre en évidence que ces valeurs sont fixées à 0 et ne peuvent prendre aucune autre valeur :

Problèmes de dynamique plans
Un problème de dynamique nécessite de représenter à la fois des efforts et des mouvements. Pour pouvoir simplifier le problème, il faut donc qu'il soit plan dans le sens de la statique et dans le sens de la cinématique.
Si le plan d'étude est le plan , alors le torseur cinétique s'écrit :


et le torseur dynamique









 Portail de la physique
Portail de la physique  Portail du génie mécanique
Portail du génie mécanique