Socket A
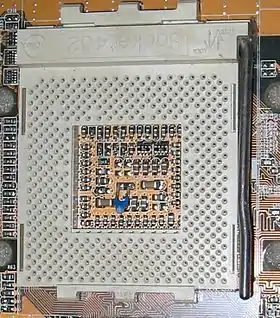
Le Socket A (ou Socket 462) est le socket utilisé pour fixer les processeurs AMD depuis l'Athlon K7 jusqu'à l'Athlon XP 3200+, et les processeurs AMD d'entrée de gamme, incluant le Duron et le Sempron. Le socket est de type Zero Insertion Force Pin Grid Array avec 462 broches, dont 11 sont bouchées pour assurer le détrompage lors du montage du processeur. Zero Insertion Force (« force d'insertion nulle »). Il dispose donc d'un levier, ou à défaut d'une vis (sur les ordinateurs portables) pour verrouiller ou déverrouiller le microprocesseur, rendant son changement aisé sans outillage spécifique (par exemple pour augmenter les performances de l'ordinateur).
| Socket 462 / A | |
| |
| Production | arrêtée |
|---|---|
| Statut | obsolète |
| Format | Socket |
| Type | PGA - ZIF |
| Contacts | 462 |
| Protocole du bus | EV6 |
| Processeurs | AMD Athlon (650 - 1 400 MHz) AMD Athlon XP (1500+ - 3200+) AMD Duron (600 - 1 800 MHz) AMD Sempron (2000+ - 3000+) AMD Athlon MP (1 GHz - 3000+) |
Le Socket A remplace le Slot A des premiers Athlon. En effet, les cartouches au format Slot A se justifiaient par l'utilisation de mémoire cache séparée du cœur du processeur. Avec l'amélioration des procédés de fabrication, AMD a pu introduire l'Athlon « Thunderbird », qui sur une même puce réunit le cœur du processeur (unités de calcul) et la mémoire cache de niveau 2. Dès lors, l'utilisation d'une carte fille de type Slot A est inutile et augmente le prix de revient final.
Certains rares ordinateurs d'entrée de gamme disposent d'un processeur soudé à la carte mère, interdisant son démontage sans outillage spécifique.
À partir du quatrième trimestre 2004, le socket A fut progressivement remplacé par le Socket 754, utilisé par les processeurs Sempron et Athlon 64.
Contexte
Les sockets AMD par ordre chronologique :
- Socket A (Socket 462)
- Socket 754
- Socket 939
- Socket 940
- Socket AM2
- Socket F
- Socket F+
- Socket AM2+
- Socket AM3
- Socket FM2
- Socket AM3+
- Socket FM2+
- Socket AM1
Spécifications techniques
- Support des fréquences d'horloge de processeur entre 600 MHz (Duron) et 2 333 MHz (Athlon XP 3200+)
- Le Socket A utilise le protocole de bus DEC Alpha EV6, et est cadencé à la fréquence de 100, 133, 166 ou 200 MHz. Ce bus est dit DDR (Double Data Rate, taux de transfert double en français). En effet, ce bus utilise les fronts montants et les fronts descendants de l'horloge pour transmettre les informations, ce qui permet de doubler le taux de transfert par rapport à la fréquence réelle (une information par demi-période au lieu d'une information par période dans un système classique).
- C'est la plateforme sur laquelle le premier processeur x86 1,0 GHz a fonctionné.
 Portail de l’informatique
Portail de l’informatique