Symétrie de rotation
En physique, la symétrie de rotation, ou invariance par rotation, est la propriété d'une théorie, ou d'un système physique de ne pas être modifié soit par une rotation spatiale quelconque, ou alors par seulement certaines d'entre elles. Lorsque le système est invariant par n'importe quelle rotation d'espace, on parle d'isotropie (du Grec isos (ἴσος, "égal, identique") et tropos (τρόπος, "tour, direction"). Dans ce cas toutes les directions de l'espace sont équivalentes[1]. L'isotropie de l'espace est à l'origine de la conservation du moment cinétique, en application du théorème de Noether[2].
Dans d'autres cas, l'invariance par rotation n'est valable que pour un sous-ensemble des rotations d'espace : par exemple seulement autour d'un certain axe (symétrie axiale) et / ou d'un certain angle (demi-tour, quart de tour...). Certaines directions de l'espace sont alors privilégiées, et l'espace n'est plus isotrope: cette situation se rencontre par exemple dans les cristaux ou encore en présence d'un champ extérieur appliqué.
En mathématiques cette propriété s'applique à un objet géométrique mais également à d'autres objets comme un opérateur (par exemple le laplacien de l'espace ℝ3 est invariant par rotation).
Définitions générales
Définitions générales sur la rotation
Sur le plan mathématique, il est possible de repérer un point M de l'espace ordinaire[3] par les coordonnées du vecteur dans un repère d'espace Oxyz.

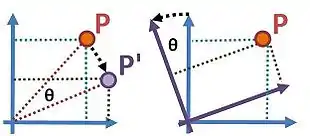
Dans un premier temps, il convient de définir l'axe de rotation, comme une direction quelconque de l'espace, notée (Δ), passant par l'origine du repère, et orientée de façon appropriée afin de définir le sens de rotation. Dans la suite l'orientation sera prise selon la règle dites de la main droite, telle que l'angle de rotation noté θ autour de l'axe est positif s'il est dans le sens direct dans tout plan perpendiculaire à l'axe.
Cet aspect étant précisé, il est possible d'adopter deux points de vue pour définir une rotation d'espace d'un angle θ autour de l'axe de rotation (Δ):
- on procède à une rotation autour de l'axe de tous les points, le repère d'espace restant fixe: ainsi le point M est transporté à la position M', repérée par le vecteur . Ce point de vue est dit actif, car dans le cas d'un système physique, on procède à une rotation de celui-ci.
- ou on procède à une rotation du système de coordonnées tout entier autour de l'axe, le point M restant en place. Dans ce cas on utilise le repère "tourné" (R') pour repérer la position du point M: dans ce nouveau repère les coordonnées de deviennent . Ce point de vue est dit passif, car dans le cas d'un système physique, celui-ci reste là où il était, et c'est le repère d'espace qui tourne.



Clairement, il y a équivalence entre les deux points de vue: il est facile de montrer qu'une rotation d'un angle θ dans le point de vue "actif" équivaut exactement à une rotation d'un angle -θ dans le point de vue passif. Dans la suite c'est uniquement le premier point de vue (rotation du système et non du repère) qui est adopté.
Matrice de rotation
La relation entre les deux vecteurs et est de la forme , où est une matrice orthogonale de dimensions 3x3[4].




Par exemple dans le cas où l'axe de rotation coïncide avec l'axe Oz on a . Il est facile de vérifier que l'opération de rotation autour de deux axes différents n'est pas commutative en général: cela se traduira par le fait que . Toute rotations autour d'une direction quelconque peut se décomposer en une combinaison de rotations autour des trois axes Ox, Oy et Oz.


Il est évident que l'inverse d'une rotation d'un angle θ autour d'un axe donné est la rotation d'un angle -θ autour de ce même axe. Par suite, toute opération de rotation autour d'un axe admet un inverse. Il est également évident que la rotation d'un angle nul (modulo 2π) ne change rien.
Par suite il est facile de voir que l'ensemble des rotations d'espace constitue muni d'une loi de composition des rotations constitue un groupe non commutatif. Celui-ci est isomorphe au groupe O(3) des matrices réelles orthogonales de dimensions 3 munie du produit matriciel. Bien souvent on se limite aux rotations d'espace qui ne modifient pas l'orientation du repère, donc aux matrices orthogonales de déterminant +1. Celles-ci définissent un sous-groupe de O(3) appelé groupe spécial orthogonal, noté SO(3).
Invariance par rotation d'une fonction ou d'un opérateur
En mathématiques, un objet comme une fonction est dite invariante par rotation lorsque son expression est invariante par une rotation arbitraire des variables. Ainsi la fonction f de deux variables réelles définie par est invariante par toute rotation d'un angle arbitraire dans le plan xOy. En effet, dans le cas d'une telle rotation la transformation des coordonnées (x,y) d'un point quelconque est donnée par:



Il est facile de vérifier que l'on a pour tout point , par suite la fonction garde exactement la même forme après une rotation arbitraire des coordonnées dans le plan[5]. En notant R la matrice de rotation associée, l'invariance par rotation se traduira par le fait que pour tout point et pour un angle arbitraire de rotation . Il est possible également de définir des opérateurs invariants par rotation: dans ce cas si représentent un tel opérateur, l'invariance par rotation se traduira par le fait qu'il commute avec l'opérateur de rotation autour de l'axe considéré . Un exemple est donné par l'opérateur Laplacien , invariant par toute rotation passant par l'origine.





Symétrie continue ou discrète
Dans le cas où un objet ou un système physique est invariant par toute rotation arbitraire d'un angle quelconque autour d'un axe, on parle de symétrie continue. Dans ce cas on dit simplement que le système admet un axe de symétrie, sans autre précision. Dans ce cas le groupe de symétrie du système sera constitué par l'ensemble des rotations autour de cet axe, dont il facile de voir qu'il constitue un sous-groupe de SO(3). S'il existe un point tel que tout axe passant par ce point est axe de symétrie, le groupe de symétrie du système sera SO(3) tout entier.
Il existe aussi des objets ou des systèmes dans lequel il n'y a symétrie autour de l'axe que pour certaines valeurs (sous-entendu, dénombrables) de l'angle de rotation. Ce type de symétrie par rotation est dite discrète par opposition au cas précédent. Plus précisément, un axe de symétrie d'ordre n est tel que le système est invariant par toute rotation d'un angle , avec n entier positif. Le cas de l'axe d'ordre 1 est trivial, puisqu'il correspond à un tour complet du système autour de l'axe, et est toujours vérifié en fait (il n'y a pas alors de symétrie). Un tel axe de symétrie est noté Cn. Le tableau suivant donne des exemples de tels axes de symétrie pour certains objets ou figures.

| C2 | C3 | C4 | C5 | C6 |
|---|---|---|---|---|
 |
.svg.png.webp) |
 |
 |
 |
La matrice de rotation associée à une rotation autour d'un axe de symétrie d'ordre n sera , (Δ) donnant la direction de l'axe Cn.

Exemples et applications
Groupe de symétrie d'un système physique
Pour un système physique donné, effectuer l'inventaire des symétries constitue une étape préalable indispensable pour l'étude du système. Les opérations de symétrie par rotation représentent une classe très importante d'opérations de symétrie avec les autres symétries comme celle par translation dans l'espace, dans le temps, ou l'inversion. L'ensemble des opérations de symétrie d'un système physique donné possède une structure de groupe (généralement non commutatif), appelé groupe de symétrie du système. Sa détermination permet souvent de simplifier considérablement l'étude du système car elle introduit des contraintes concernant par exemple les grandeurs physiques conservées.
Afin de mieux préciser ces idées, il convient de prendre deux exemples concrets:
- Soit une charge électrique, de valeur q, placée en un point choisi pour origine du repère associé au référentiel d'étude, et qui est fixe dans ce dernier. L'objet est de déterminer la forme du champ électrique créé dans tout l'espace par cette charge.
- Il est évident que ce système est invariant pour toute rotation passant par l'origine (symétrie sphérique). Ceci implique également que le champ électrique, et le potentiel électrique dont il dérive, soient également invariants par toute rotation autour de l'origine. Il est évident que cela va avoir deux conséquences. Tout d'abord le champ et le potentiel électrostatique ne dépendront que de la distance r à l'origine, sinon il y aurait dépendance avec les variables angulaires, ce qui serait en contradiction avec l'invariance par rotation. Ensuite, le champ électrique ne peut être dirigé que selon la direction radiale : finalement il est de la forme . Il est évident que cette étude simplifie considérablement la résolution du problème, en premier lieu en permettant de choisir un système de coordonnées adapté, et en limitant les calculs.



- Soit un fil électrique filiforme et rectiligne, considéré comme infiniment long, dans lequel circule un courant permanent d'intensité I. L'objet est de déterminer la forme du champ magnétique créé en un point à l'extérieur du fil. Dans ce cas, il est évident que le système est invariant par toute rotation autour de l'axe du fil (symétrie axiale), qui constitue une direction privilégiée. Cela incite à se placer dans un système de coordonnées cylindro-polaire, l'axe polaire étant celui du fil.
- En raison de la symétrie axiale, le champ magnétique ne dépendra pas de l'angle polaire. L'invariance par translation (fil considéré comme infini) permet d'affirmer également qu'il ne dépendra pas de z, par suite il est de la forme .
- La symétrie axiale implique également que tout plan contenant le fil est plan de symétrie du système, et donc, puisque le champ magnétique est un vecteur axial, plan d'antisymétrie pour celui-ci. En revanche l'invariance par translation dans la direction du fil implique que tout plan perpendiculaire à ce dernier soit plan d'antisymétrie pour le système (inversion du sens du courant)[6], et donc plan de symétrie pour le champ. Par suite, ce dernier est nécessairement contenu dans un plan perpendiculaire au fil et est perpendiculaire à tout plan contenant ce dernier. Finalement le champ magnétique créé par le fil est purement orthoradial et donc de la forme .



Dans ces deux exemples il est clair que les considérations de symétrie du système, notamment par rotation, sont déterminantes pour simplifier considérablement le problème posé.
Exemples particuliers d'objets
Il existe une infinité d'objets qui sont symétriques par rotation ; ici ne sont repris que les plus fréquents.
- La sphère, sur ce point de vue, est parfaite (c'est d'ailleurs l'objet le plus symétrique) : elle est invariante par toute rotation autour d'un axe qui passe par son centre.
- Le cube est nettement moins symétrique : il n'est invariant que par 24 rotations (tiers de tour ou multiples d'un quart de tour, d'axes passant par son centre), qui forment un groupe isomorphe au groupe symétrique S4.
- Le tétraèdre régulier est un peu moins symétrique : son groupe des rotations est le groupe alterné A4. Il est donc invariant par 12 rotations, dont les tiers de tour d'axe passant par un sommet et le centre de la face opposée.
Voir aussi
Notes et références
- Cette notion d'isotropie ne doit pas être confondue avec la propriété d'homogénéité de l'espace, qui se rapporte à l'équivalence de tous les points de celui-ci, soit à l'invariance par une translation d'espace quelconque. Cette propriété de l'espace est elle à l'origine de la conservation de la quantité de mouvement.
- Cf. Lev Landau et Evgueni Lifchits, Physique théorique, t. 1 : Mécanique [détail des éditions], chapitre 1.
- Assimilé à muni du produit scalaire ordinaire, lui donnant ainsi une structure d'espace euclidien.
- De façon plus abstraite il est possible de représenter la rotation comme l'action d'un opérateur de rotation agissant sur les éléments de l'espace euclidien représentant l'espace ordinaire, pour donner un nouvel élément de cet espace. La matrice constitue une représentation de cet opérateur dans la base associé au repère d'espace.
- Géométriquement, cela se traduira par le fait que la surface définie par la donnée de admettra l'axe Oz comme axe de symétrie. De fait cette surface est ici un paraboloïde de révolution d'axe Oz.
- On pourrait aussi dire que tout axe de rotation d'ordre 2 (demi-tour) de direction perpendiculaire à la direction du fil, et coupant ce dernier, est un axe d'antisymétrie du système, et donc de symétrie pour le champ magnétique.

