Question
Usage of that python class will not work with my setup of one motor. I
agree and I want to instead use the GPIO library to control the board
controlling the motor.
Example code I found: import RPi.GPIO as GPIO
I do not know how to edit the code to work with my project.] but I am
using IN1 on the controller board and GPIO2 from the pi.
Answer
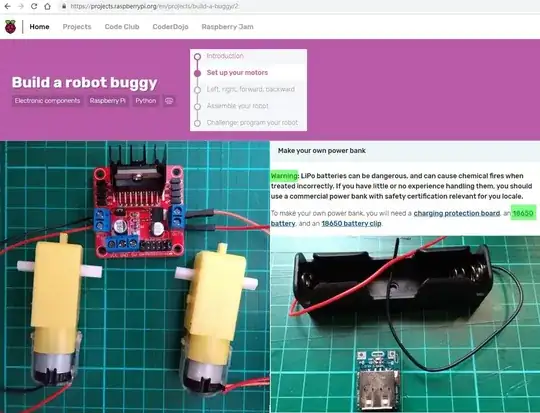
It is not at all clear what DC motor driver you are using. Is it L293D, L298N? You might like to compare you motor driver board the L298N used by the following tutorial.
Build a robot buggy - projects.raspberrypi.org
It is also not clear if you are use Rpi.GPIO module or gpiozero1.5. Gpiozero assumes a generic motor driver board. If your motor is not that generic, you might find teething problem. If you are using gpioZero, you should start with "from gpiozero import Robot".
gpiozero's Robot is a bit complicated. For example, it has a "curve" thing:
curve_left (float) – The amount to curve left while moving backwards,
by driving the left motor at a slower speed. Maximum curve_left is 1,
the default is 0 (no curve). This parameter can only be specified as a
keyword parameter, and is mutually exclusive with curve_right.
The curve function to drive two motors at different speeds is for sure not for newbies. I would recommend to start with Build a robot buggy - projects.raspberrypi.org, which takes you by the hand, starts with simple movements, and finally hints you how to drive you robot along a square path.
But if you have already begun and got stuck with GpioZeroRobot, I would suggest you to remove all advanced stuff like class "curve" and "phase/enable". They are too advanced for newbies.
References
Build a robot buggy - projects.raspberrypi.org
Why isn’t my Raspberry Pi motor spinning?
Why don't my motors rotate?
Gpio Zero Robot 16.1.15. - GPIO Zero
A generic dual-motor robot
This class is constructed with two tuples representing the forward and
backward pins of the left and right controllers respectively. For
example, if the left motor’s controller is connected to GPIOs 4 and
14, while the right motor’s controller is connected to GPIOs 17 and
18.
Example to drive the robot
from gpiozero import Robot
robot = Robot(left=(4, 14), right=(17, 18))
robot.forward()
curve_left (float)
The amount to curve left while moving backwards, by driving the left
motor at a slower speed. Maximum curve_left is 1, the default is 0 (no
curve). This parameter can only be specified as a keyword parameter,
and is mutually exclusive with curve_right.
Phase/Enable motor board
class gpiozero.PhaseEnableRobot(left, right, *, pwm=True, pin_factory=None)
Extends CompositeDevice to represent a dual-motor robot based around a
Phase/Enable motor board.

