Inverse function theorem
In mathematics, specifically differential calculus, the inverse function theorem gives a sufficient condition for a function to be invertible in a neighborhood of a point in its domain: namely, that its derivative is continuous and non-zero at the point. The theorem also gives a formula for the derivative of the inverse function. In multivariable calculus, this theorem can be generalized to any continuously differentiable, vector-valued function whose Jacobian determinant is nonzero at a point in its domain, giving a formula for the Jacobian matrix of the inverse. There are also versions of the inverse function theorem for complex holomorphic functions, for differentiable maps between manifolds, for differentiable functions between Banach spaces, and so forth.
| Part of a series of articles about |
| Calculus |
|---|
The theorem was first established by Picard and Goursat using an iterative scheme: the basic idea is to prove a fixed point theorem using the contraction mapping theorem.
Statements
For functions of a single variable, the theorem states that if is a continuously differentiable function with nonzero derivative at the point ; then is injective (or bijective onto the image) in a neighborhood of , the inverse is continuously differentiable near , and the derivative of the inverse function at is the reciprocal of the derivative of at :





It can happen that a function may be injective near a point while . An example is . In fact, for such a function, the inverse cannot be differentiable at , since if were differentiable at , then, by the chain rule, , which implies . (The situation is different for holomorphic functions; see #Holomorphic inverse function theorem below.)





For functions of more than one variable, the theorem states that if f is a continuously differentiable function from an open subset of into , and the derivative is invertible at a point a (that is, the determinant of the Jacobian matrix of f at a is non-zero), then there exist neighborhoods of in and of such that and is bijective.[1] Writing , this means that the system of n equations has a unique solution for in terms of when . Note that the theorem does not say is bijective onto the image where is invertible but that it is locally bijective where is invertible.













Moreover, the theorem says that the inverse function is continuously differentiable, and its derivative at is the inverse map of ; i.e.,


In other words, if are the Jacobian matrices representing , this means:



The hard part of the theorem is the existence and differentiability of . Assuming this, the inverse derivative formula follows from the chain rule applied to . (Indeed, ) Since taking the inverse is infinitely differentiable, the formula for the derivative of the inverse shows that if is continuously times differentiable, with invertible derivative at the point a, then the inverse is also continuously times differentiable. Here is a positive integer or .




There are two variants of the inverse function theorem.[1] Given a continuously differentiable map , the first is

- The derivative is surjective (i.e., the Jacobian matrix representing it has rank ) if and only if there exists a continuously differentiable function on a neighborhood of such near ,



and the second is
- The derivative is injective if and only if there exists a continuously differentiable function on a neighborhood of such near .

In the first case (when is surjective), the point is called a regular value. Since , the first case is equivalent to saying is not in the image of critical points (a critical point is a point such that the kernel of is nonzero). The statement in the first case is a special case of the submersion theorem.

These variants are restatements of the inverse functions theorem. Indeed, in the first case when is surjective, we can find an (injective) linear map such that . Define so that we have:




Thus, by the inverse function theorem, has inverse near ; i.e., near . The second case ( is injective) is seen in the similar way.



Example
Consider the vector-valued function defined by:


The Jacobian matrix is:

with Jacobian determinant:

The determinant is nonzero everywhere. Thus the theorem guarantees that, for every point p in , there exists a neighborhood about p over which F is invertible. This does not mean F is invertible over its entire domain: in this case F is not even injective since it is periodic: .



Counter-example
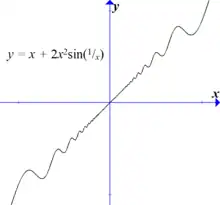




If one drops the assumption that the derivative is continuous, the function no longer need be invertible. For example and has discontinuous derivative and , which vanishes arbitrarily close to . These critical points are local max/min points of , so is not one-to-one (and not invertible) on any interval containing . Intuitively, the slope does not propagate to nearby points, where the slopes are governed by a weak but rapid oscillation.



Methods of proof
As an important result, the inverse function theorem has been given numerous proofs. The proof most commonly seen in textbooks relies on the contraction mapping principle, also known as the Banach fixed-point theorem (which can also be used as the key step in the proof of existence and uniqueness of solutions to ordinary differential equations).[2][3]
Since the fixed point theorem applies in infinite-dimensional (Banach space) settings, this proof generalizes immediately to the infinite-dimensional version of the inverse function theorem[4] (see Generalizations below).
An alternate proof in finite dimensions hinges on the extreme value theorem for functions on a compact set.[5]
Yet another proof uses Newton's method, which has the advantage of providing an effective version of the theorem: bounds on the derivative of the function imply an estimate of the size of the neighborhood on which the function is invertible.[6]
A proof using successive approximation
To prove existence, it can be assumed after an affine transformation that and , so that .


By the mean value theorem for vector-valued functions, for a function , . Setting , it follows that
![{\displaystyle u:[0,1]\to \mathbb {R} ^{m}}](../I/0861516447575de59c9ec7a299b12185e3e84970.svg)



Now choose so that for . Suppose that and define inductively by and . The assumptions show that if then








- .

In particular implies . In the inductive scheme and . Thus is a Cauchy sequence tending to . By construction as required.







To check that is C1, write so that . By the inequalities above, so that . On the other hand if , then . Using the geometric series for , it follows that . But then









![{\displaystyle {\|g(y+k)-g(y)-f^{\prime }(g(y))^{-1}k\| \over \|k\|}={\|h-f^{\prime }(x)^{-1}[f(x+h)-f(x)]\| \over \|k\|}\leq 4{\|f(x+h)-f(x)-f^{\prime }(x)h\| \over \|h\|}}](../I/3441d200e9768c80cd8373312a96905583bd389e.svg)
tends to 0 as and tend to 0, proving that is C1 with .


The proof above is presented for a finite-dimensional space, but applies equally well for Banach spaces. If an invertible function is Ck with , then so too is its inverse. This follows by induction using the fact that the map on operators is Ck for any (in the finite-dimensional case this is an elementary fact because the inverse of a matrix is given as the adjugate matrix divided by its determinant). [1][7] The method of proof here can be found in the books of Henri Cartan, Jean Dieudonné, Serge Lang, Roger Godement and Lars Hörmander.


A proof using the contraction mapping principle
Here is a proof based on the contraction mapping theorem. Specifically, following T. Tao,[8] it uses the following consequence of the contraction mapping theorem.
Lemma — Let denote an open ball of radius r in with center 0. If is a map such that and there exists a constant such that





for all in , then is injective on and .



(More generally, the statement remains true if is replaced by a Banach space.)
Basically, the lemma says that a small perturbation of the identity map by a contraction map is injective and preserves a ball in some sense. Assuming the lemma for a moment, we prove the theorem first. As in the above proof, it is enough to prove the special case when and . Let . The mean value inequality applied to says:





Since and is continuous, we can find an such that




for all in . Then the early lemma says that is injective on and . Then



is bijective and thus has an inverse. Next, we show the inverse is continuously differentiable (this part of the argument is the same as that in the previous proof). This time, let denote the inverse of and . For , we write or . Now, by the early estimate, we have




and so . Writing for the operator norm,



As , we have and is bounded. Hence, is differentiable at with the derivative . Also, is the same as the composition where ; so is continuous.







It remains to show the lemma. First, the map is injective on since if , then and so


- ,

which is a contradiction unless . (This part does not need the assumption .) Next we show . The idea is to note that this is equivalent to, given a point in , find a fixed point of the map



where such that and the bar means a closed ball. To find a fixed point, we use the contraction mapping theorem and checking that is a well-defined strict-contraction mapping is straightforward. Finally, we have: since





As might be clear, this proof is not substantially different from the previous one, as the proof of the contraction mapping theorem is by successive approximation.
Applications
Implicit function theorem
The inverse function theorem can be used to solve a system of equations

i.e., expressing as functions of , provided the Jacobian matrix is invertible. The implicit function theorem allows to solve a more general system of equations:


for in terms of . Though more general, the theorem is actually a consequence of the inverse function theorem. First, the precise statement of the implicit function theorem is as follows:[9]
- given a map , if , is continuously differentiable in a neighborhood of and the derivative of at is invertible, then there exists a differentiable map for some neighborhoods of such that . Moreover, if , then ; i.e., is a unique solution.











To see this, consider the map . By the inverse function theorem, has the inverse for some neighborhoods . We then have:





implying and Thus has the required property.




Giving a manifold structure
In differential geometry, the inverse function theorem is used to show that the pre-image of a regular value under a smooth map is a manifold.[10] Indeed, let be such a smooth map from an open subset of (since the result is local, there is no loss of generality with considering such a map). Fix a point in and then, by permuting the coordinates on , assume the matrix has rank . Then the map is such that has rank . Hence, by the inverse function theorem, we find the smooth inverse of defined in a neighborhood of . We then have


![{\displaystyle \left[{\frac {\partial f_{i}}{\partial x_{j}}}(a)\right]_{1\leq i,j\leq r}}](../I/86d70b8d798dded1a0281323d71b822189bfd8ea.svg)







which implies

That is, after the change of coordinates by , is a coordinate projection (this fact is known as the submersion theorem). Moreover, since is bijective, the map


is bijective with the smooth inverse. That is to say, gives a local parametrization of around . Hence, is a manifold. (Note the proof is quite similar to the proof of the implicit function theorem and, in fact, the implicit function theorem can be also used instead.)
More generally, the theorem shows that if a smooth map is transversal to a submanifold , then the pre-image is a submanifold.[11]



Global version
The inverse function theorem is a local result; it applies to each point. A priori, the theorem thus only shows the function is locally bijective (or locally diffeomorphic of some class). The next topological lemma can be used to upgrade local injectivity to injectivity that is global to some extent.
Lemma — [12][13] If is a closed subset of a (second-countable) topological manifold (or, more generally, a topological space admitting an exhaustion by compact subsets) and , some topological space, is a local homeomorphism that is injective on , then is injective on some neighborhood of .



Proof:[14] First assume is compact. If the conclusion of the theorem is false, we can find two sequences such that and each converge to some points in . Since is injective on , . Now, if is large enough, are in a neighborhood of where is injective; thus, , a contradiction.






In general, consider the set . It is disjoint from for any subset where is injective. Let be an increasing sequence of compact subsets with union and with contained in the interior of . Then, by the first part of the proof, for each , we can find a neighborhood of such that . Then has the required property. (See also [15] for an alternative approach.)










The lemma implies the following (a sort of) global version of the inverse function theorem:
Inverse function theorem — [16] Let be a map between open subsets of or more generally of manifolds. Assume is continuously differentiable (or is ). If is injective on a closed subset and if the Jacobian matrix of is invertible at each point of , then is injective in a neighborhood of and is continuously differentiable (or is ).





Note that if is a point, then the above is the usual inverse function theorem.
Holomorphic inverse function theorem
There is a version of the inverse function theorem for holomorphic maps.
Theorem — [17][18] Let be open subsets such that and a holomorphic map whose Jacobian matrix in variables is invertible (the determinant is nonzero) at . Then is injective in some neighborhood of and the inverse is holomorphic.





The theorem follows from the usual inverse function theorem. Indeed, let denote the Jacobian matrix of in variables and for that in . Then we have , which is nonzero by assumption. Hence, by the usual inverse function theorem, is injective near with continuously differentiable inverse. By chain rule, with ,






where the left-hand side and the first term on the right vanish since and are holomorphic. Thus, for each .



Similarly, there is the implicit function theorem for holomorphic functions.[19]
As already noted earlier, it can happen that an injective smooth function has the inverse that is not smooth (e.g., in a real variable). This is not the case for holomorphic functions because of:

Proposition — [19] If is an injective holomorphic map between open subsets of , then is holomorphic.


Formulations for manifolds
The inverse function theorem can be rephrased in terms of differentiable maps between differentiable manifolds. In this context the theorem states that for a differentiable map (of class ), if the differential of ,



is a linear isomorphism at a point in then there exists an open neighborhood of such that



is a diffeomorphism. Note that this implies that the connected components of M and N containing p and F(p) have the same dimension, as is already directly implied from the assumption that dFp is an isomorphism. If the derivative of F is an isomorphism at all points p in M then the map F is a local diffeomorphism.
Generalizations
Banach spaces
The inverse function theorem can also be generalized to differentiable maps between Banach spaces X and Y.[20] Let U be an open neighbourhood of the origin in X and a continuously differentiable function, and assume that the Fréchet derivative of F at 0 is a bounded linear isomorphism of X onto Y. Then there exists an open neighbourhood V of in Y and a continuously differentiable map such that for all y in V. Moreover, is the only sufficiently small solution x of the equation .







There is also the inverse function theorem for Banach manifolds.[21]
Constant rank theorem
The inverse function theorem (and the implicit function theorem) can be seen as a special case of the constant rank theorem, which states that a smooth map with constant rank near a point can be put in a particular normal form near that point.[22] Specifically, if has constant rank near a point , then there are open neighborhoods U of p and V of and there are diffeomorphisms and such that and such that the derivative is equal to . That is, F "looks like" its derivative near p. The set of points such that the rank is constant in a neighborhood of is an open dense subset of M; this is a consequence of semicontinuity of the rank function. Thus the constant rank theorem applies to a generic point of the domain.








When the derivative of F is injective (resp. surjective) at a point p, it is also injective (resp. surjective) in a neighborhood of p, and hence the rank of F is constant on that neighborhood, and the constant rank theorem applies.
Polynomial functions
If it is true, the Jacobian conjecture would be a variant of the inverse function theorem for polynomials. It states that if a vector-valued polynomial function has a Jacobian determinant that is an invertible polynomial (that is a nonzero constant), then it has an inverse that is also a polynomial function. It is unknown whether this is true or false, even in the case of two variables. This is a major open problem in the theory of polynomials.
Selections
When with , is times continuously differentiable, and the Jacobian at a point is of rank , the inverse of may not be unique. However, there exists a local selection function such that for all in a neighborhood of , , is times continuously differentiable in this neighborhood, and ( is the Moore–Penrose pseudoinverse of ).[23]










See also
Notes
- Theorem 1.1.7. in Hörmander, Lars (2015). The Analysis of Linear Partial Differential Operators I: Distribution Theory and Fourier Analysis. Classics in Mathematics (2nd ed.). Springer. ISBN 9783642614972.
- McOwen, Robert C. (1996). "Calculus of Maps between Banach Spaces". Partial Differential Equations: Methods and Applications. Upper Saddle River, NJ: Prentice Hall. pp. 218–224. ISBN 0-13-121880-8.
- Tao, Terence (September 12, 2011). "The inverse function theorem for everywhere differentiable maps". Retrieved 2019-07-26.
- Jaffe, Ethan. "Inverse Function Theorem" (PDF).
- Spivak 1965, pages 31–35
- Hubbard, John H.; Hubbard, Barbara Burke (2001). Vector Analysis, Linear Algebra, and Differential Forms: A Unified Approach (Matrix ed.).
- Cartan, Henri (1971). Calcul Differentiel (in French). Hermann. pp. 55–61. ISBN 9780395120330.
- Theorem 17.7.2 in Tao, Terence (2014). Analysis. II. Texts and Readings in Mathematics. Vol. 38 (Third edition of 2006 original ed.). New Delhi: Hindustan Book Agency. ISBN 978-93-80250-65-6. MR 3310023. Zbl 1300.26003.
- Spivak 1965, Theorem 2-12.
- Spivak 1965, Theorem 5-1. and Theorem 2-13.
- https://sites.math.northwestern.edu/~jnkf/classes/mflds/4transversality.pdf
- One of Spivak's books (Editorial note: give the exact location).
- Hirsch 1976, Ch. 2, § 1., Exercise 7. NB: This one is for a -immersion.
- Lemma 13.3.3. of https://www.utsc.utoronto.ca/people/kupers/wp-content/uploads/sites/50/2020/12/difffop-2020.pdf
- Dan Ramras (https://mathoverflow.net/users/4042/dan-ramras), On a proof of the existence of tubular neighborhoods., URL (version: 2017-04-13): https://mathoverflow.net/q/58124
- Ch. I., § 3, Exercise 10. and § 8, Exercise 14. in V. Guillemin, A. Pollack. "Differential Topology". Prentice-Hall Inc., 1974. ISBN 0-13-212605-2.
- Griffiths & Harris 1978, p. 18.
- Fritzsche, K.; Grauert, H. (2002). From Holomorphic Functions to Complex Manifolds. Springer. pp. 33–36. ISBN 9780387953953.
- Griffiths & Harris 1978, p. 19.
- Luenberger, David G. (1969). Optimization by Vector Space Methods. New York: John Wiley & Sons. pp. 240–242. ISBN 0-471-55359-X.
- Lang, Serge (1985). Differential Manifolds. New York: Springer. pp. 13–19. ISBN 0-387-96113-5.
- Boothby, William M. (1986). An Introduction to Differentiable Manifolds and Riemannian Geometry (Second ed.). Orlando: Academic Press. pp. 46–50. ISBN 0-12-116052-1.
- Dontchev, Asen L.; Rockafellar, R. Tyrrell (2014). Implicit Functions and Solution Mappings: A View from Variational Analysis (Second ed.). New York: Springer-Verlag. p. 54. ISBN 978-1-4939-1036-6.
References
- Allendoerfer, Carl B. (1974). "Theorems about Differentiable Functions". Calculus of Several Variables and Differentiable Manifolds. New York: Macmillan. pp. 54–88. ISBN 0-02-301840-2.
- Baxandall, Peter; Liebeck, Hans (1986). "The Inverse Function Theorem". Vector Calculus. New York: Oxford University Press. pp. 214–225. ISBN 0-19-859652-9.
- Nijenhuis, Albert (1974). "Strong derivatives and inverse mappings". Amer. Math. Monthly. 81 (9): 969–980. doi:10.2307/2319298. hdl:10338.dmlcz/102482. JSTOR 2319298.
- Griffiths, Phillip; Harris, Joseph (1978), Principles of Algebraic Geometry, John Wiley & Sons, ISBN 978-0-471-05059-9.
- Hirsch, Morris W. (1976). Differential Topology. Springer-Verlag. ISBN 978-0-387-90148-0.
- Protter, Murray H.; Morrey, Charles B., Jr. (1985). "Transformations and Jacobians". Intermediate Calculus (Second ed.). New York: Springer. pp. 412–420. ISBN 0-387-96058-9.
{{cite book}}: CS1 maint: multiple names: authors list (link) - Renardy, Michael; Rogers, Robert C. (2004). An Introduction to Partial Differential Equations. Texts in Applied Mathematics 13 (Second ed.). New York: Springer-Verlag. pp. 337–338. ISBN 0-387-00444-0.
- Rudin, Walter (1976). Principles of mathematical analysis. International Series in Pure and Applied Mathematics (Third ed.). New York: McGraw-Hill Book. pp. 221–223. ISBN 9780070856134.
- Spivak, Michael (1965). Calculus on Manifolds: A Modern Approach to Classical Theorems of Advanced Calculus. San Francisco: Benjamin Cummings. ISBN 0-8053-9021-9.
| Spaces |
| ||||
|---|---|---|---|---|---|
| Theorems | |||||
| Operators | |||||
| Algebras | |||||
| Open problems | |||||
| Applications | |||||
| Advanced topics | |||||
| |||||