Euclidean planes in three-dimensional space
In Euclidean geometry, a plane is a flat two-dimensional surface that extends indefinitely. Euclidean planes often arise as subspaces of three-dimensional space . A prototypical example is one of a room's walls, infinitely extended and assumed infinitesimal thin. While a pair of real numbers suffices to describe points on a plane, the relationship with out-of-plane points requires special consideration for their embedding in the ambient space .


Derived concepts
A plane segment (or simply "plane", in lay use) is a planar surface region; it is analogous to a line segment. A bivector is an oriented plane segment, analogous to directed line segments. A face is a plane segment bounding a solid object.[1] A slab is a region bounded by two parallel planes. A parallelepiped is a region bounded by three pairs of parallel planes.
Occurrence in nature

A plane serves as a mathematical model for many physical phenomena, such as specular reflection in a plane mirror or wavefronts in a traveling plane wave. The free surface of undisturbed liquids tends to be nearly flat (see flatness). The flattest surface ever manufactured is a quantum-stabilized atom mirror.[2] In astronomy, various reference planes are used to define positions in orbit. Anatomical planes may be lateral ("sagittal"), frontal ("coronal") or transversal. In geology, beds (layers of sediments) often are planar. Planes are involved in different forms of imaging, such as the focal plane, picture plane, and image plane.

Background
Euclid set forth the first great landmark of mathematical thought, an axiomatic treatment of geometry.[3] He selected a small core of undefined terms (called common notions) and postulates (or axioms) which he then used to prove various geometrical statements. Although the plane in its modern sense is not directly given a definition anywhere in the Elements, it may be thought of as part of the common notions.[4] Euclid never used numbers to measure length, angle, or area. The Euclidean plane equipped with a chosen Cartesian coordinate system is called a Cartesian plane; a non-Cartesian Euclidean plane equipped with a polar coordinate system would be called a polar plane.
A plane is a ruled surface.
Euclidean plane
In mathematics, a Euclidean plane is a Euclidean space of dimension two, denoted E2. It is a geometric space in which two real numbers are required to determine the position of each point. It is an affine space, which includes in particular the concept of parallel lines. It has also metrical properties induced by a distance, which allows to define circles, and angle measurement.
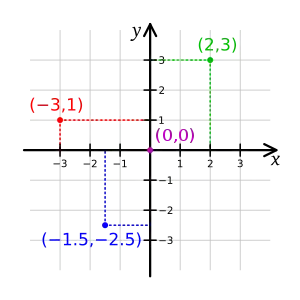
A Euclidean plane with a chosen Cartesian coordinate system is called a Cartesian plane.
The set of the pairs of real numbers (the real coordinate plane), equipped with the dot product, is often called the Euclidean plane, since every Euclidean plane is isomorphic to it.Representation
This section is solely concerned with planes embedded in three dimensions: specifically, in R3.
Determination by contained points and lines
In a Euclidean space of any number of dimensions, a plane is uniquely determined by any of the following:
Properties
The following statements hold in three-dimensional Euclidean space but not in higher dimensions, though they have higher-dimensional analogues:
- Two distinct planes are either parallel or they intersect in a line.
- A line is either parallel to a plane, intersects it at a single point, or is contained in the plane.
- Two distinct lines perpendicular to the same plane must be parallel to each other.
- Two distinct planes perpendicular to the same line must be parallel to each other.
Point–normal form and general form of the equation of a plane
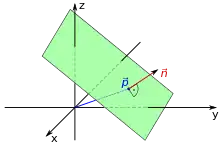
In a manner analogous to the way lines in a two-dimensional space are described using a point-slope form for their equations, planes in a three dimensional space have a natural description using a point in the plane and a vector orthogonal to it (the normal vector) to indicate its "inclination".
Specifically, let r0 be the position vector of some point P0 = (x0, y0, z0), and let n = (a, b, c) be a nonzero vector. The plane determined by the point P0 and the vector n consists of those points P, with position vector r, such that the vector drawn from P0 to P is perpendicular to n. Recalling that two vectors are perpendicular if and only if their dot product is zero, it follows that the desired plane can be described as the set of all points r such that

The dot here means a dot (scalar) product.
Expanded this becomes

which is the point–normal form of the equation of a plane.[5] This is just a linear equation

where

which is the expanded form of

In mathematics it is a common convention to express the normal as a unit vector, but the above argument holds for a normal vector of any non-zero length.
Conversely, it is easily shown that if a, b, c, and d are constants and a, b, and c are not all zero, then the graph of the equation
is a plane having the vector n = (a, b, c) as a normal.[6] This familiar equation for a plane is called the general form of the equation of the plane.[7]
Thus for example a regression equation of the form y = d + ax + cz (with b = −1) establishes a best-fit plane in three-dimensional space when there are two explanatory variables.
Describing a plane with a point and two vectors lying on it
Alternatively, a plane may be described parametrically as the set of all points of the form


where s and t range over all real numbers, v and w are given linearly independent vectors defining the plane, and r0 is the vector representing the position of an arbitrary (but fixed) point on the plane. The vectors v and w can be visualized as vectors starting at r0 and pointing in different directions along the plane. The vectors v and w can be perpendicular, but cannot be parallel.
Describing a plane through three points
Let p1 = (x1, y1, z1), p2 = (x2, y2, z2), and p3 = (x3, y3, z3) be non-collinear points.
Method 1
The plane passing through p1, p2, and p3 can be described as the set of all points (x,y,z) that satisfy the following determinant equations:

Method 2
To describe the plane by an equation of the form , solve the following system of equations:




This system can be solved using Cramer's rule and basic matrix manipulations. Let

If D is non-zero (so for planes not through the origin) the values for a, b and c can be calculated as follows:



These equations are parametric in d. Setting d equal to any non-zero number and substituting it into these equations will yield one solution set.
Method 3
This plane can also be described by the "point and a normal vector" prescription above. A suitable normal vector is given by the cross product

and the point r0 can be taken to be any of the given points p1, p2 or p3[8] (or any other point in the plane).
Operations
Distance from a point to a plane
In Euclidean space, the distance from a point to a plane is the distance between a given point and its orthogonal projection on the plane, the perpendicular distance to the nearest point on the plane.
It can be found starting with a change of variables that moves the origin to coincide with the given point then finding the point on the shifted plane that is closest to the origin. The resulting point has Cartesian coordinates :


- .


Line–plane intersection
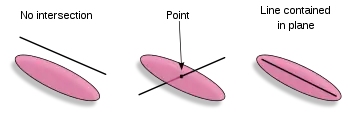
In analytic geometry, the intersection of a line and a plane in three-dimensional space can be the empty set, a point, or a line. It is the entire line if that line is embedded in the plane, and is the empty set if the line is parallel to the plane but outside it. Otherwise, the line cuts through the plane at a single point.
Distinguishing these cases, and determining equations for the point and line in the latter cases, have use in computer graphics, motion planning, and collision detection.Line of intersection between two planes
Sphere–plane intersection
When the intersection of a sphere and a plane is not empty or a single point, it is a circle. This can be seen as follows:
Let S be a sphere with center O, P a plane which intersects S. Draw OE perpendicular to P and meeting P at E. Let A and B be any two different points in the intersection. Then AOE and BOE are right triangles with a common side, OE, and hypotenuses AO and BO equal. Therefore, the remaining sides AE and BE are equal. This proves that all points in the intersection are the same distance from the point E in the plane P, in other words all points in the intersection lie on a circle C with center E.[9] This proves that the intersection of P and S is contained in C. Note that OE is the axis of the circle.
Now consider a point D of the circle C. Since C lies in P, so does D. On the other hand, the triangles AOE and DOE are right triangles with a common side, OE, and legs EA and ED equal. Therefore, the hypotenuses AO and DO are equal, and equal to the radius of S, so that D lies in S. This proves that C is contained in the intersection of P and S.
As a corollary, on a sphere there is exactly one circle that can be drawn through three given points.[10]
The proof can be extended to show that the points on a circle are all a common angular distance from one of its poles.[11]
Compare also conic sections, which can produce ovals.See also
Notes
- Merriam-Webster's Collegiate Dictionary (Eleventh ed.). Springfield, MA: Merriam-Webster. 2004.
- Evans, Jon (22 August 2008). "Smoothest surface ever is a mirror for atoms". New Scientist. Retrieved 5 March 2023.
- Eves 1963, p. 19
- Joyce, D.E. (1996), Euclid's Elements, Book I, Definition 7, Clark University, retrieved 8 August 2009
- Anton 1994, p. 155
- Anton 1994, p. 156
- Weisstein, Eric W. (2009), "Plane", MathWorld--A Wolfram Web Resource, retrieved 8 August 2009
- Dawkins, Paul, "Equations of Planes", Calculus III
- Proof follows Hobbs, Prop. 304
- Hobbs, Prop. 308
- Hobbs, Prop. 310
References
- Anton, Howard (1994), Elementary Linear Algebra (7th ed.), John Wiley & Sons, ISBN 0-471-58742-7
- Eves, Howard (1963), A Survey of Geometry, vol. I, Boston: Allyn and Bacon, Inc.
External links
- "Plane", Encyclopedia of Mathematics, EMS Press, 2001 [1994]
- Weisstein, Eric W. "Plane". MathWorld.
- "Easing the Difficulty of Arithmetic and Planar Geometry" is an Arabic manuscript, from the 15th century, that serves as a tutorial about plane geometry and arithmetic.