Join (topology)
In topology, a field of mathematics, the join of two topological spaces and , often denoted by or , is a topological space formed by taking the disjoint union of the two spaces, and attaching line segments joining every point in to every point in . The join of a space with itself is denoted by . The join is defined in slightly different ways in different contexts





Geometric sets
If and are subsets of the Euclidean space , then:[1]: 1

,
![{\displaystyle A\star B\ :=\ \{t\cdot a+(1-t)\cdot b~|~a\in A,b\in B,t\in [0,1]\}}](../I/98643146497b3e57fe55a5dabe58917214b30b42.svg)
that is, the set of all line-segments between a point in and a point in .
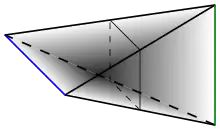
Some authors[2]: 5 restrict the definition to subsets that are joinable: any two different line-segments, connecting a point of A to a point of B, meet in at most a common endpoint (that is, they do not intersect in their interior). Every two subsets can be made "joinable". For example, if is in and is in , then and are joinable in . The figure above shows an example for m=n=1, where and are line-segments.




Examples
- The join of two simplices is a simplex: the join of an n-dimensional and an m-dimensional simplex is an (m+n+1)-dimensional simplex. Some special cases are:
- The join of two disjoint points is an interval (m=n=0).
- The join of a point and an interval is a triangle (m=0, n=1).
- The join of two line segments is homeomorphic to a solid tetrahedron or disphenoid, illustrated in the figure above right (m=n=1).
- The join of a point and an (n-1)-dimensional simplex is an n-dimensional simplex.
- The join of a point and a polygon (or any polytope) is a pyramid, like the join of a point and square is a square pyramid. The join of a point and a cube is a cubic pyramid.
- The join of a point and a circle is a cone, and the join of a point and a sphere is a hypercone.
Topological spaces
If and are any topological spaces, then:
![{\displaystyle A\star B\ :=\ A\sqcup _{p_{0}}(A\times B\times [0,1])\sqcup _{p_{1}}B,}](../I/a286a7bfd44c450d258e8c22673630a2f077600a.svg)
where the cylinder is attached to the original spaces and along the natural projections of the faces of the cylinder:
![{\displaystyle A\times B\times [0,1]}](../I/dc14ea900fe608b27ffbc8ae5cf2174698c0b085.svg)


Usually it is implicitly assumed that and are non-empty, in which case the definition is often phrased a bit differently: instead of attaching the faces of the cylinder to the spaces and , these faces are simply collapsed in a way suggested by the attachment projections : we form the quotient space

![{\displaystyle A\star B\ :=\ (A\times B\times [0,1])/\sim ,}](../I/decae26fa8d28d5c10c9799cff0f65b6ceb2641f.svg)
where the equivalence relation is generated by



At the endpoints, this collapses to and to .


If and are bounded subsets of the Euclidean space , and and , where are disjoint subspaces of such that the dimension of their affine hull is (e.g. two non-intersecting non-parallel lines in ), then the topological definition reduces to the geometric definition, that is, the "geometric join" is homeomorphic to the "topological join":[3]: 75, Prop.4.2.4





![{\displaystyle {\big (}(A\times B\times [0,1])/\sim {\big )}\simeq \{t\cdot a+(1-t)\cdot b~|~a\in A,b\in B,t\in [0,1]\}}](../I/b80c180023f15c725d0a81c1117eb5a576610e42.svg)
Abstract simplicial complexes
If and are any abstract simplicial complexes, then their join is an abstract simplicial complex defined as follows:[3]: 74, Def.4.2.1
- The vertex set is a disjoint union of and .
- The simplices of are all disjoint unions of a simplex of with a simplex of : (in the special case in which and are disjoint, the join is simply ).





Examples
- Suppose and , that is, two sets with a single point. Then , which represents a line-segment. Note that the vertex sets of A and B are disjoint; otherwise, we should have made them disjoint. For example, where a1 and a2 are two copies of the single element in V(A). Topologically, the result is the same as - a line-segment.
- Suppose and . Then , which represents a triangle.
- Suppose and , that is, two sets with two discrete points. then is a complex with facets , which represents a "square".









The combinatorial definition is equivalent to the topological definition in the following sense:[3]: 77, Exercise.3 for every two abstract simplicial complexes and , is homeomorphic to , where denotes any geometric realization of the complex .




Maps
Given two maps and , their join is defined based on the representation of each point in the join as , for some :[3]: 77







Special cases
The cone of a topological space , denoted , is a join of with a single point.

The suspension of a topological space , denoted , is a join of with (the 0-dimensional sphere, or, the discrete space with two points).


Properties
Commutativity
The join of two spaces is commutative up to homeomorphism, i.e. .

Associativity
It is not true that the join operation defined above is associative up to homeomorphism for arbitrary topological spaces. However, for locally compact Hausdorff spaces we have Therefore, one can define the k-times join of a space with itself, (k times).



It is possible to define a different join operation which uses the same underlying set as but a different topology, and this operation is associative for all topological spaces. For locally compact Hausdorff spaces and , the joins and coincide.[4]

Homotopy equivalence
If and are homotopy equivalent, then and are homotopy equivalent too.[3]: 77, Exercise.2


Reduced join
Given basepointed CW complexes and , the "reduced join"



is homeomorphic to the reduced suspension

of the smash product. Consequently, since is contractible, there is a homotopy equivalence


This equivalence establishes the isomorphism .

Homotopical connectivity
Given two triangulable spaces , the homotopical connectivity () of their join is at least the sum of connectivities of its parts:[3]: 81, Prop.4.4.3


- .

As an example, let be a set of two disconnected points. There is a 1-dimensional hole between the points, so . The join is a square, which is homeomorphic to a circle that has a 2-dimensional hole, so . The join of this square with a third copy of is a octahedron, which is homeomorphic to , whose hole is 3-dimensional. In general, the join of n copies of is homeomorphic to and .







Deleted join
The deleted join of an abstract complex A is an abstract complex containing all disjoint unions of disjoint faces of A:[3]: 112

Examples
- Suppose (a single point). Then , that is, a discrete space with two disjoint points (recall that = an interval).
- Suppose (two points). Then is a complex with facets (two disjoint edges).
- Suppose (an edge). Then is a complex with facets (a square). Recall that represents a solid tetrahedron.
- Suppose A represents an (n-1)-dimensional simplex (with n vertices). Then the join is a (2n-1)-dimensional simplex (with 2n vertices): it is the set of all points (x1,...,x2n) with non-negative coordinates such that x1+...+x2n=1. The deleted join can be regarded as a subset of this simplex: it is the set of all points (x1,...,x2n) in that simplex, such that the only nonzero coordinates are some k coordinates in x1,..,xn, and the complementary n-k coordinates in xn+1,...,x2n.







Properties
The deleted join operation commutes with the join. That is, for every two abstract complexes A and B:[3]: Lem.5.5.2

Proof. Each simplex in the left-hand-side complex is of the form , where , and are disjoint. Due to the properties of a disjoint union, the latter condition is equivalent to: are disjoint and are disjoint.





Each simplex in the right-hand-side complex is of the form , where , and are disjoint and are disjoint. So the sets of simplices on both sides are exactly the same. □

In particular, the deleted join of the n-dimensional simplex with itself is the n-dimensional crosspolytope, which is homeomorphic to the n-dimensional sphere .[3]: Cor.5.5.3


Generalization
The n-fold k-wise deleted join of a simplicial complex A is defined as:
, where "k-wise disjoint" means that every subset of k have an empty intersection.

In particular, the n-fold n-wise deleted join contains all disjoint unions of n faces whose intersection is empty, and the n-fold 2-wise deleted join is smaller: it contains only the disjoint unions of n faces that are pairwise-disjoint. The 2-fold 2-wise deleted join is just the simple deleted join defined above.
The n-fold 2-wise deleted join of a discrete space with m points is called the (m,n)-chessboard complex.
See also
References
- Colin P. Rourke and Brian J. Sanderson (1982). Introduction to Piecewise-Linear Topology. New York: Springer-Verlag. doi:10.1007/978-3-642-81735-9. ISBN 978-3-540-11102-3.
- Bryant, John L. (2001-01-01), Daverman, R. J.; Sher, R. B. (eds.), "Chapter 5 - Piecewise Linear Topology", Handbook of Geometric Topology, Amsterdam: North-Holland, pp. 219–259, ISBN 978-0-444-82432-5, retrieved 2022-11-15
- Matoušek, Jiří (2007). Using the Borsuk-Ulam Theorem: Lectures on Topological Methods in Combinatorics and Geometry (2nd ed.). Berlin-Heidelberg: Springer-Verlag. ISBN 978-3-540-00362-5.
Written in cooperation with Anders Björner and Günter M. Ziegler
, Section 4.3 - Fomenko, Anatoly; Fuchs, Dmitry (2016). Homotopical Topology (2nd ed.). Springer. p. 20.
- Hatcher, Allen, Algebraic topology. Cambridge University Press, Cambridge, 2002. xii+544 pp. ISBN 0-521-79160-X and ISBN 0-521-79540-0
- This article incorporates material from Join on PlanetMath, which is licensed under the Creative Commons Attribution/Share-Alike License.
- Brown, Ronald, Topology and Groupoids Section 5.7 Joins.