Algoritmo de navegación
Los Algoritmos de navegación son la quintaesencia del software ejecutable en calculadoras portátiles o en Smartphone como ayuda al arte de la navegación, este artículo intenta describir tanto los algoritmos como el software para "PC-Smartphone" que implementan los diferentes procedimientos de cálculo para la navegación.

La potencia de cálculo obtenida por los lenguajes: Basic, "C", Java, etc .., de las calculadoras portátiles o de los Smartphone, ha hecho que se pudieran desarrollar programas que permiten calcular la posición sin necesidad de tablas, de hecho tienen unas tablas básicas con los factores de corrección para cada año y calculan los valores "al vuelo" en tiempo de ejecución.
Comparación entre los métodos de cálculo manuales y el uso de calculadoras o similares
- Los métodos tradicionales necesitan tablas náuticas (que hay que poner al día) voluminosas y caras, lápiz y papel, y tiempo de cálculo, siguiendo los algoritmos de trabajo.
- Las calculadoras (y similares) no necesitan libros (tienen las tablas y efemérides integradas) y, con unos algoritmos propios, permiten el cálculo rápido y sin errores de los problemas de navegación.
Tipos de algoritmos
- Navegación general Distancia, demora, angle horizontal, IALA, rumbos, navegación loxodrómica, navegación ortodrómica, partes de meridiano, meteorología náutica, mareas ...
- Navegación Astronómica : Reducción de observaciones, círculos y rectas de altura, posición observada, RA, Gha, Dec ..
- Software shareware PC-Smartphone: Almanaque náutico, navegación, declinación magnética, corrección de la altura, ...
Programas para la navegación general
Programas sobre la carta náutica, rumbos, navegación costera y balizas, publicaciones náuticas. La sección de navegación astronómica incluye la resolución del triángulo de posición, la utilidad de una recta de altura, el reconocimiento de astros y el determinante de la recta de altura, además de otros temas de interés en náutica: mareas, cinemática naval, meteorología y huracanes, y oceanografía. Toda medida del rumbo efectuada con un compás magnético o brújula debe ser corregida debido a la declinación magnética o variación local.
Coordenadas astronómicas
Subrutina de conversión de coordenadas
sub Rectang2Polar (a () as double, b () as double) static
'----- Subprograma para convertir un vector de estado coord.cartesianas
'----- En vector de estado en coord.polars.
'----- De entrada: vector de estado en coord.cartesianes
'----- De salida: vector de estado en coord.polars.
'----- NOTA: El vector de velocidad polar es el de la velocidad total,
'----- Corregido por el efecto de la latitud.
'------------------------------------------------- ------------------------
mar x as double
mar y as double
mar z as double
mar x_dot as double
mar y_dot as double
mar z_dot as double
mar rho as double
mar r as double
mar lambda as double
mar beta as double
mar lambda_dot as double
mar beta_dot as double
mar r_dot as double
x = a (1)
y = a (2)
z = a (3)
x_dot = a (4)
y_dot = a (5)
z_dot = a (6)
rho = sqr (x * x+y * y)
r = sqr (rho * rho+z * z)
lambda = atan2 (y, x)
beta = atan2 (z, rho)
if (z <0 #) then beta = beta - TWOPI
yf rho = 0 # then
lambda_dot = 0 #
beta_dot = 0 #
else
lambda_dot = (x * y_dot - y * x_dot)/(rho * rho)
beta_dot = (z_dot * rho * rho - z * (x * x_dot+_
y * y_dot))/(r * r * rho)
end if
r_dot = (x * x_dot+y * y_dot+z * z_dot)/r
'----- Componentes del vector de posición
b (1) = lambda
if b (1)> = TWOPI then b (1) = b (1) - TWOPI
b (2) = beta
b (3) = r
'----- Componentes del vector velocidad total
b (4) = r * lambda_dot * cuerpo (beta)
b (5) = r * beta_dot
b (6) = r_dot
end sub
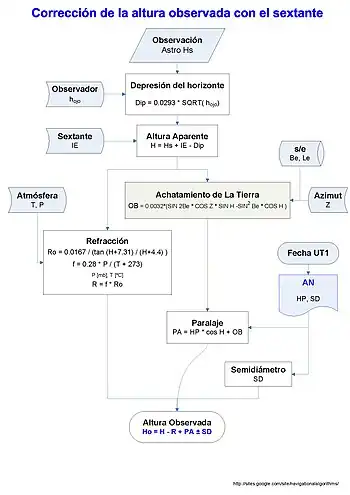
Programas para la navegación astronómica
Los algoritmos sobre navegación avanzada incluyen pilotaje y navegación astronómica: loxodromia y ortodrómica. Corrección de la altura del sextante. Posición astronómica con calculadora, Plantilla y Carta mercatoria en blanco. Posición por 2 Rectas de Altura. Posición a partir de n Rectas de Altura. Ecuación vectorial del Círculo de Altura. Posición para solución vectorial a partir de dos observaciones. Posición por Círculos de Altura: solución matricial. Y artículos relacionados con procedimientos antiguos como la obtención de la latitud por la estrella polar, la meridiana, el método de las distancias lunares, etc.
Programas para el "Almanaque Náutico"
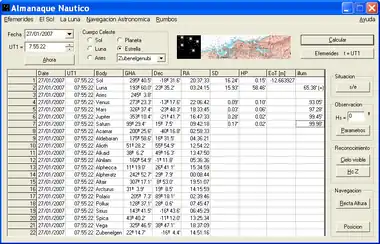
Calculan las efemérides de los astros usados en navegación que solían venir en el almanaque
- Gha - angle Horario respecto Greenwich
- Dic - Declinación
- SD - Semidiàmetre
- HP - paralaje Horizontal
Programas de Cálculo Astronómico
Resuelven el problema de calcular la posición a partir de observaciones de astros efectuadas con el sextante en Navegación Astronómica.
Implementación de algoritmos:
- Para n <2 observaciones
- Para n> = 2 observaciones
- DeWit/USNO Nautical Almanac/Compac Fecha, Least squares algorithm for n LOPS
- Kaplan algorithm, USNO.[3]
- Para n> = 8 observaciones, da además la solución para el rumbo y la velocidad de fondo.
Referencias
- An analytical solution of the two star sight problem of celestial navigation. James A. Van Allen. NAVIGATION Quiere 28, No 1, 1981
- Vector Solution for the Intersection of Two Circles of Equal Altitude. Andrés Ruiz González. Journal of Navigation, Volume 61, Issue 02, April 2008, p. 355-365.The Royal Institute of Navigation
- Determining the Position and Motion of a Vessel from Celestial Observaciones, Kaplan, G. H. Navigation, Vol. 42, No 4, 1995, pp. 631-648
Enlaces externos
- Vector Solution for the Intersection of Two Circles of Equal Altitude, Andrés Ruiz.
- Journal of Navigation (en inglés)
- The Institute of Navigation (en inglés)
- Navigational Algorithms
| Control de autoridades |
|
|---|
 Datos: Q3823529
Datos: Q3823529