Equilibrio mecánico
El equilibrio mecánico es un estado estacionario en el que se cumple alguna de estas dos condiciones:
- Un sistema está en total o parcial equilibrio mecánico cuando la suma de fuerzas y momentos sobre cada partícula del sistema es cero.
- Un sistema está en equilibrio mecánico si su posición en el espacio de configuración es un punto en el que el gradiente de energía potencial es cero (0).
La segunda definición es más general y útil, especialmente en mecánica de medios continuos.
Definición basada en equilibrio de fuerzas
Como consecuencia de las leyes de la mecánica, una partícula en equilibrio no sufre aceleración lineal ni de rotación, pero puede estar moviéndose a velocidad uniforme o rotar a velocidad angular uniforme. Esto es ampliable a un sólido rígido.
Condición necesaria de equilibrio
Las ecuaciones necesarias de equilibrio mecánico son:
- Una partícula o un sólido rígido está en equilibrio de traslación cuando: la suma de todas las fuerzas que actúan sobre el cuerpo es cero.

- En el espacio se tienen tres ecuaciones de fuerzas, una por dimensión; descomponiendo cada fuerza en sus coordenadas resulta:

- Y como un vector es cero cuando cada una de sus componentes es cero, se tiene:



- Un sólido rígido está en equilibrio de traslación cuando la suma de las componentes de las fuerzas que actúan sobre él es cero.

- En el espacio tiene las tres ecuaciones una por dimensión; por un razonamiento similar al de las fuerzas:

- Resultando:



- Un sólido rígido está en equilibrio de rotación cuando la suma de las componentes de los momentos que actúan sobre él es cero.
Un sólido rígido está en equilibrio si está en equilibrio de traslación y de rotación.
Se distingue un tipo particular de equilibrio mecánico llamado equilibrio estático que correspondería a una situación en que el cuerpo está en reposo, con velocidad cero: una hoja de papel sobre un escritorio estará en equilibrio mecánico y estático, un paracaidista cayendo a velocidad constante, dada por la velocidad límite estaría en equilibrio mecánico pero no estático.
Condiciones suficientes
Tal como se ha expuesto en la sección anterior, dado un sólido una condición necesaria para que este sólido esté en equilibrio mecánico es que la suma de reacciones y el momento resultante de estas reacciones sea cero. Si el sólido es indeformable la condición además de necesaria es suficiente, sin embargo, para ciertos sólidos deformables la condición de que la suma de fuerzas y momentos se anule puede no ser suficiente. En ese último caso además deben satisfacerse localmente las ecuaciones diferenciales de equilibrio:

Donde:
- denotan las componentes del tensor de tensiones.
- es la fuerza por unidad de volumen actuante en cada punto del sólido.


Las condiciones anteriores también son aplicables a un fluido y para la mayoría de fluidos admiten las ecuaciones anteriores son equivalentes a una forma más simple.
Definición basada en la energía potencial
La definición anterior, basada en fuerzas, no es fácilmente generalizable a los medios continuos, ni proporciona información sobre uno de los aspectos más importantes del estado de equilibrio: la estabilidad. Para este tipo de sistemas lo más cómodo es usar la segunda definición, basada en la energía potencial; debido a la relación fundamental entre fuerza y energía, ambas son equivalentes. Además, resulta más natural definir el equilibrio estable. Si la función de energía potencial es diferenciable, entonces los puntos de equilibrio coincidirán con los puntos donde ocurra un máximo o un mínimo locales de la energía potencial.
Estabilidad del equilibrio
El análisis de la estabilidad del equilibrio puede llevarse a cabo estudiando los mínimos y máximos locales (extremos locales) de la función de energía potencial.
Un resultado elemental del análisis matemático dice una condición necesaria para la existencia de un extremo local de una función diferenciable es que todas las derivadas primeras se anulen en algún punto. Para determinar problemas unidimensionales, comprobar si un punto de equilibrio es estable, inestable o indiferente implica verificar las derivadas segundas de la energía potencial:
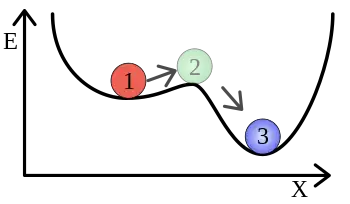
- Un punto es de equilibrio inestable, si la segunda derivada de la energía potencial < 0 y por tanto la energía potencial tiene un máximo local. Si el sistema sufre un desplazamiento de su posición de equilibrio, por pequeño que este sea, entonces se alejará más y más de él (de ahí el nombre inestabilidad para esa situación).
- Un punto es de equilibrio indiferente o neutral, si la segunda derivada = 0, entonces se encuentra una región donde la energía no varía. Así, si el sistema es desplazado de la posición de equilibrio una cantidad suficientemente pequeña, posiblemente no volverá a acercarse al equilibrio pero tampoco divergirá mucho de la posición anterior de equilibrio.
- Un punto es de equilibrio estable si la segunda derivada > 0 y por tanto la energía potencial tiene un mínimo local. La respuesta del sistema frente a pequeñas perturbaciones o un alejamiento arbitrariamente pequeño del punto de equilibrio es volver u oscilar alrededor del punto de equilibrio. Si existe más de un punto de equilibrio estable para un sistema, entonces se dice que cualquiera de ellos cuya energía potencia es mayor que el mínimo absoluto representa un estado metaestable.
Para problemas bidimensionales y tridimensionales (o más generalmente n-dimensionales) la discusión anterior de la estabilidad se hace más complicada y requiere examinar la forma cuadrática Q(x1,...,xn) definida por la matriz hessiana de la energía potencial:
- Equilibrio estable, se da cuando la forma cuadrática Q(x1,...,xn) es definida positiva y, por tanto, todos sus autovalores son números positivos.
- Equilibrio totalmente inestable, se da cuando la forma cuadrática Q(x1,...,xn) es definida negativa, por tanto, todos sus autovalores son negativos.
- Equilibrio mixto inestable, se da cuando la forma cuadrática Q(x1,...,xn) es no es definida positiva y alguno de sus autovalores es negativo. Esto implica que según ciertas direcciones puede haber estabilidad unidimensional pero según otras habrá inestabilidad unidimensional
Véase también
- Estática
- Dinámica
- Cinemática
- Momento de fuerza respecto a un centro o polo.
- Metaestabilidad
- Principio de d'Alembert
- Ingeniería mecánica
- Ingeniería química
Referencias
- Marion & Thornton, Classical Dynamics of Particles and Systems. Fourth Edition, Harcourt Brace & Company (1995). (en inglés)
- Resnick, R. and D. Halliday (1966) Physics, Part 1, John Wiley & Sons, New York, 646 pp + Appendices. (en inglés)