Mecanismo de Klann
El mecanismo de Klann es un dispositivo mecánico coplanario diseñado para simular el sistema de locomoción de las patas de los animales, con la misión de sustituir a las ruedas en terrenos muy accidentados. La conexión consta de un marco, una manivela, dos balancines de apoyo y dos acopladores, conectados mediante articulaciones cilíndricas.

Las proporciones de cada uno de los enlaces del mecanismo están definidas para optimizar la linealidad del movimiento del pie en cada medio ciclo de rotación de la manivela. Durante el otro semiciclo, el pie pasa a ser levantado a una altura predeterminada, antes de regresar a la posición de inicio, repitiéndose el ciclo. Dos de estas conexiones funcionan en la misma fase de la manivela, y las otras dos con medio ciclo de desfase, permitiendo que el marco del vehículo se desplace completamente en paralelo.
El mecanismo de Klann posee muchas de las ventajas de los sistemas de desplazamiento más avanzados, solventando algunas de sus limitaciones. Puede salvar bordillos, subir escaleras, o desplazarse en zonas que no son accesibles a vehículos con ruedas, y no requiere el control de un microprocesador o multitud de complejos mecanismos actuadores. Tecnológicamente, se sitúa entre estos dispositivos andantes robóticos y los sistemas de ejes y ruedas conducidos.
Ilustraciones

Pierna de ejemplo

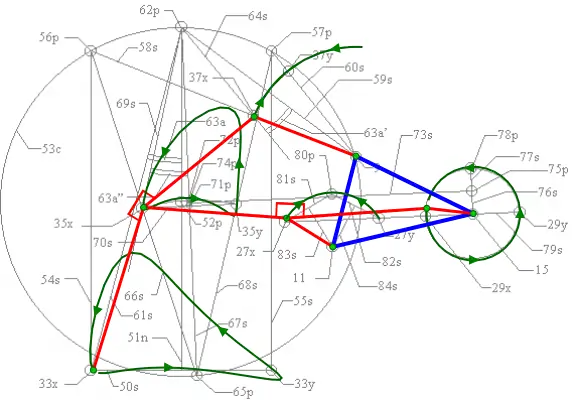
En la Patente de EE.UU. 6,260,862 figura un conjunto de coordenadas de la pierna de ejemplo:
| Punto | X | Y | Descripción |
|---|---|---|---|
| Puntos de referencia | |||
| 9 | 1.366 | 1.366 | Primer eje del balancín del brazo |
| 11 | 1.009 | 0.574 | Segundo eje del balancín del brazo |
| 15 | 1.599 | 0.750 | Fuste de la manivela |
| Posición de la zancada plenamente extendida | |||
| 27X | 0.741 | 0.750 | Articulación del codo |
| 29x | 1.331 | 0.750 | Manivela |
| 33x | 0.000 | 0.000 | Pie |
| 35x | 0.232 | 0.866 | Eje de la articulación de la rodilla |
| 37x | 0.866 | 1.500 | Articulación de la cadera |
| Posición de paso en tierra | |||
| 27Y | 1.277 | 0.750 | Articulación del codo |
| 29y | 1.867 | 0.750 | Manivela |
| 33y | 1.000 | 0.000 | Pie |
| 35y | 0.768 | 0.866 | Eje de la articulación de la rodilla |
| 37y | 1.000 | 1.732 | Articulación de la cadera |
Historia
El mecanismo de Klann fue desarrollado por Joe Klann en 1994 como una expansión de la Teoría de Burmester, utilizadas para desarrollar los mecanismos de cuatro barras con doble balancín característicos de las grúas portuarias.[2] Se clasifica como un sistema cinemático de Stephenson del subtipo III.
Véase también
Referencias
- Rooney, T., Pearson, M., Welsby, J., Horsfield, I., Sewell, R. and Dogramadzi, S. (6–8 September 2011), Artificial active whiskers for guiding underwater autonomous walking robots, CLAWAR 2011, Paris, France.
- Enable Text Archivado el 14 de abril de 2004 en Wayback Machine., linkage design notes.
- Patente USPTO n.º 6260862
- Patente USPTO n.º 6364040
- Patente USPTO n.º 6478314
Enlaces externos
- Klann Linkage In Phun en YouTube. Animation of the linkage's climbing ability
- Legs, mk2 en YouTube. Clear side-on view of linkage in motion
- Son of Mr Crabby - CamBam made Klann linkage walking crab robot en YouTube.
- Mechanicalspider Archivado el 24 de marzo de 2004 en Wayback Machine.
- Mechanisms101 Archivado el 2 de febrero de 2009 en Wayback Machine.
- Mondo Spider
- Walking Beast Archivado el 6 de abril de 2006 en Wayback Machine.
- Crabfu
- Artificial Active Whiskers for Guiding Underwater Autonomous Walking Robots eprint
| Control de autoridades |
|
|---|
 Datos: Q4292095
Datos: Q4292095 Multimedia: Klann linkages / Q4292095
Multimedia: Klann linkages / Q4292095