Segmentación (electrónica)
La segmentación (en inglés pipelining, literalmente 'tubería' o 'cañería', o data pipeline)[1] es un método por el cual se consigue aumentar el rendimiento de algunos sistemas electrónicos digitales. Se usa principalmente en los microprocesadores.
El nombre, por analogía, viene de que para impulsar el gas en un oleoducto a la máxima velocidad posible es necesario dividir el oleoducto en tramos y colocar una bomba que dé un nuevo impulso al gas. El símil con la programación existe en que los cálculos deben ser registrados o sincronizados con el reloj cada cierto tiempo para que la ruta crítica (tramo con más carga o retardo computacional entre dos registros de reloj) se reduzca.
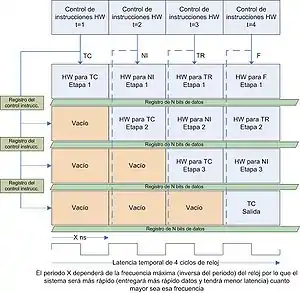
La ruta crítica es en realidad la frecuencia máxima de trabajo alcanzada por el conjunto. A mayor ruta crítica (tiempo o retraso entre registros) menor es la frecuencia máxima de trabajo y a menor ruta crítica mayor frecuencia de trabajo. La una es la inversa de la otra. Repartir o segmentar equitativamente el cálculo hace que esa frecuencia sea la óptima a costa de más área para el almacenamiento o registro de los datos intervinientes y de un retraso o latencia (en ciclos de reloj/tiempo) en la salida del resultado equivalente al número de segmentaciones o registros realizados. La ventaja primordial de este sistema es que, tal y como se muestra en la imagen, una vez el canal (pipe) está lleno, es decir, después de una latencia de cuatro en la imagen, los resultados de cada comando vienen uno tras otro cada flanco de reloj y sin latencia extra por estar encadenados dentro del mismo canal. Todo esto habiendo maximizado la frecuencia máxima de trabajo.
El alto rendimiento y la velocidad elevada de los modernos microprocesadores, se debe, principalmente a la conjunción de tres técnicas:
- Arquitectura Harvard (arquitectura que propicia el paralelismo).
- Procesador de tipo RISC.
- La propia segmentación.
La segmentación consiste en descomponer la ejecución de cada instrucción en varias etapas para poder empezar a procesar una instrucción diferente en cada una de ellas y trabajar con varias a la vez.
En el caso del procesador DLX podemos encontrar las siguientes etapas en una instrucción:
- IF (instruction fetch): búsqueda.
- ID (instruction decode): decodificación.
- EX (execution): ejecución en la unidad aritmético lógica.
- MEM (memory): memoria.
- WB (writeback): escritura.
Cada una de estas etapas de la instrucción usa en exclusiva un hardware determinado del procesador, de tal forma que la ejecución de cada una de las etapas en principio no interfiere en la ejecución del resto.
En el caso de que el procesador no pudiese ejecutar las instrucciones en etapas segmentadas, la ejecución de la siguiente instrucción sólo se podría llevar a cabo tras la finalización de la primera. En cambio en un procesador segmentado, salvo excepciones de dependencias de datos o uso de unidades funcionales, la siguiente instrucción podría iniciar su ejecución tras acabar la primera etapa de la instrucción actual.
Otro ejemplo de lo anterior, en el caso del PIC, consiste en que el procesador realice al mismo tiempo la ejecución de una instrucción y la búsqueda del código de la siguiente.
Referencias
- Data Pipeline Development(en inglés) Publicado por Dativa, recuperado el 24 de mayo de 2018
Enlaces externos
 Wikimedia Commons alberga una galería multimedia sobre Segmentación.
Wikimedia Commons alberga una galería multimedia sobre Segmentación.
| Control de autoridades |
|
|---|
 Datos: Q1192422
Datos: Q1192422