Teorema de unicidad de Aleksándrov
El teorema de unicidad de Aleksándrov es un teorema de rigidez matemático, que describe poliedros convexos tridimensionales en términos de las distancias entre puntos de sus superficies. Implica que los poliedros convexos con formas distintas entre sí también tienen distintos espacios métricos de distancias superficiales, y caracteriza los espacios métricos que provienen de las distancias superficiales en los poliedros. Lleva el nombre del matemático soviético Aleksandr Danílovich Aleksándrov, quien lo publicó en la década de 1940.[1][2][3]
Enunciado del teorema
La superficie de cualquier poliedro convexo en un espacio euclídeo forma un espacio métrico, en el que la distancia entre dos puntos se mide por la longitud del camino más corto de un punto a otro en la superficie. Dentro de un determinado camino más corto, las distancias entre sus pares de puntos equivalen a las distancias entre los puntos correspondientes del segmento que los une. Una ruta con esta propiedad se conoce como una línea geodésica.
Esta propiedad de las superficies poliédricas, que cada par de puntos está conectado por una geodésica, no es cierta para muchos otros espacios métricos, y cuando es cierta, el espacio se llama espacio geodésico. El espacio geodésico formado a partir de la superficie de un poliedro se denomina desarrollo.[3]
Se puede pensar que el poliedro se ha formado plegando una hoja de papel (es decir, a partir del desarrollo de un poliedro) y hereda la misma geometría que el papel: por cada punto p dentro de una cara del poliedro, un entorno abierto suficientemente pequeño de p tendrá las mismas distancias que un subconjunto del plano. Lo mismo es cierto incluso para los puntos en las aristas del poliedro: se pueden modelar localmente como un plano euclidiano plegado en una línea e incrustado en un espacio tridimensional, pero el pliegue no cambia la estructura de los caminos más cortos en la superficie. Sin embargo, los vértices del poliedro tienen una estructura de distancia diferente: la geometría local de un vértice de poliedro es la misma que la geometría local en el vértice de un cono. Cualquier cono se puede formar a partir de una hoja plana de papel a la que se le quita una cuña pegando los bordes cortados donde se quitó la cuña. El ángulo de la cuña que se eliminó se llama defecto angular del vértice; y es un número positivo menor que 2Π. El defecto de un vértice de poliedro se puede medir restando los ángulos de las caras en ese vértice de 2Π. Por ejemplo, en un tetraedro regular, cada ángulo de cara es Π/3, y hay tres de ellos en cada vértice, por lo que restarlos de 2Π deja un defecto de Π en cada uno de los cuatro vértices.
De manera similar, un cubo tiene un defecto de Π/2 en cada uno de sus ocho vértices. Una propiedad del defecto angular (según el teorema de Gauss-Bonnet) establece que la suma de los defectos angulares de todos los vértices es siempre exactamente 4Π. En resumen, el desarrollo de un poliedro convexo es geodésico, homeomorfo (topológicamente equivalente) a una esfera, y localmente euclídeo excepto por un número finito de vértices cónicos cuyo defecto angular suma 4Π.[3]
El teorema de Aleksándrov plantea una proposición inversa a esta propiedad. Establece que si un espacio métrico es geodésico, homeomorfo a una esfera y localmente euclídeo excepto por un número finito de puntos cónicos de defecto angular positivo (que necesariamente suman 4Π), entonces existe un poliedro convexo cuyo desarrollo es el espacio dado. Además, este poliedro se define de forma única a partir de la métrica: dos poliedros convexos cualesquiera con la misma métrica de superficie deben ser congruentes entre sí como conjuntos tridimensionales.[3]
Limitaciones
El poliedro que representa el espacio métrico dado puede ser degenerado, tomando la forma de un polígono convexo bidimensional doblemente recubierto (un diedro) en lugar de un poliedro completamente tridimensional. En este caso, su superficie métrica consta de dos copias del polígono (sus dos lados) pegadas entre sí en los bordes correspondientes.[3][5]

Aunque el teorema de Aleksándrov establece que existe un único poliedro convexo cuya superficie tiene una métrica determinada, también es posible que existan poliedros no convexos con la misma métrica. El icosaedro regular permite obtener un ejemplo: si se eliminan cinco de sus triángulos y se reemplazan por cinco triángulos congruentes que forman una hendidura en el poliedro, la métrica de la superficie resultante permanece sin cambios.[6]
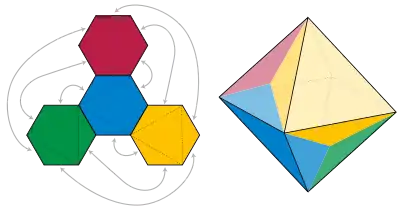
El desarrollo de cualquier poliedro se puede describir concretamente mediante una colección de polígonos bidimensionales junto con instrucciones para pegarlos en sus bordes para formar un espacio métrico, y las condiciones del teorema de Aleksándrov para espacios descritos de esta manera se verifican fácilmente. Sin embargo, las aristas donde se pegan dos polígonos podrían aplanarse y quedar en el interior de las caras del poliedro resultante, en lugar de convertirse en aristas del poliedro (para ver un ejemplo de este fenómeno, véase la ilustración con los cuatro hexágonos pegados para formar un octaedro). Por lo tanto, incluso cuando el desarrollo se describe de esta manera, puede no estar claro qué forma tiene el poliedro resultante, qué formas tienen sus caras, o incluso cuántas caras tiene. La demostración original de Aleksándrov no conduce a un algoritmo para construir el poliedro (por ejemplo dando las coordenadas de sus vértices) a partir del espacio métrico dado. En 2008, Bobenko e Izmestiev proporcionaron dicho algoritmo.[7] Su algoritmo puede aproximar las coordenadas con precisión arbitraria, en tiempo seudopolinómico.[8]
Resultados relacionados
Uno de los primeros teoremas de existencia y unicidad para poliedros convexos es el teorema de Cauchy, que establece que un poliedro convexo está determinado únicamente por la forma y la conectividad de sus caras. El teorema de Aleksándrov refuerza este principio, demostrando que incluso si se permite que las caras se plieguen sin estirarse ni encogerse, su conectividad aún determina la forma del poliedro. A su vez, la demostración de existencia hallada por Alekxándrov utiliza un fortalecimiento del teorema de Cauchy relativo a la rigidez infinitesimal ideado por Max Dehn.[3]
Un resultado análogo al de Aleksándrov para superficies convexas lisas establece que una variedad de Riemann bidimensional cuya curvatura de Gauss es positiva en todas partes y totaliza 4Π se puede representar de forma única como la superficie de un cuerpo convexo liso en tres dimensiones. La singularidad de esta representación es un resultado hallado por Stephan Cohn-Vossen en 1927, con algunas condiciones de regularidad en la superficie que fueron eliminadas en investigaciones posteriores. Su existencia fue probada por Aleksándrov, utilizando un argumento que involucraba límites de métricas poliédricas.[9] Alekséi Pogorélov generalizó estos dos resultados, caracterizando los desarrollos de cuerpos convexos arbitrarios en tres dimensiones.[3]
Otro resultado de Pogorelov sobre los espacios métricos geodésicos derivados de poliedros convexos es una versión del teorema de las tres geodésicas: cada poliedro convexo tiene al menos tres cuasigeodésicas cerradas simples. Son curvas que son localmente rectas excepto cuando pasan por un vértice, donde se requiere que tengan ángulos menores de Π a ambos lados.[10]
Los desarrollos de un poliedro ideal hiperbólico se pueden caracterizar de manera similar a los poliedros convexos euclídeos: cada variedad bidimensional con geometría hiperbólica uniforme y área finita, combinatoriamente equivalente a una esfera finitamente perforada, se puede realizar como la superficie de un poliedro ideal.[11]
Referencias
- Senechal gives a date of 1941, while O'Rourke lists 1948. See: Senechal, Marjorie (2013), Shaping Space: Exploring Polyhedra in Nature, Art, and the Geometrical Imagination, Springer, p. 62, ISBN 9780387927145.. O’Rourke, Joseph (2011), How to Fold It: The Mathematics of Linkages, Origami and Polyhedra, Cambridge University Press, p. 134, ISBN 9781139498548..
- Alexandrov, A. D. (2006), Convex Polyhedra, Springer Monographs in Mathematics, Springer, ISBN 9783540263401.. Translated into English by N. S. Dairbekov, S. S. Kutateladze, and A. B. Sossinsky. The uniqueness part of the theorem is covered in Chapter 3, and the existence part is covered in Chapter 4.
- Connelly, Robert (March 2006), «Convex Polyhedra by A. D. Alexandrov», SIAM Review 48 (1): 157-160, JSTOR 204537, doi:10.1137/SIREAD000048000001000149000001, archivado desde el original el 30 de agosto de 2017.
- Khramtcova, Elena; Langerman, Stefan (2017), «Which convex polyhedra can be made by gluing regular hexagons?», Abstracts of the 20th Japan Conference on Discrete and Computational Geometry, Graphs, and Games, pp. 63-64, archivado desde el original el 12 de septiembre de 2017, consultado el 27 de febrero de 2018.
- O'Rourke, Joseph (2010), On flat polyhedra deriving from Alexandrov's theorem, Bibcode:2010arXiv1007.2016O, arXiv:1007.2016.
- Hartshorne, Robin (2000), «Example 44.2.3, the "punched-in icosahedron"», Geometry: Euclid and beyond, Undergraduate Texts in Mathematics, Springer-Verlag, New York, p. 442, ISBN 0-387-98650-2, MR 1761093, doi:10.1007/978-0-387-22676-7..
- Bobenko, Alexander I.; Izmestiev, Ivan (2008), «Alexandrov's theorem, weighted Delaunay triangulations, and mixed volumes», Annales de l'Institut Fourier 58 (2): 447-505, MR 2410380, S2CID 14879349, arXiv:math/0609447, doi:10.5802/aif.2358.
- Kane, Daniel; Price, Gregory N.; Demaine, Erik D. (2009), «A pseudopolynomial algorithm for Alexandrov’s theorem», en Dehne, Frank; Gavrilova, Marina; Sack, Jörg-Rüdiger et al., eds., Algorithms and data structures. 11th International Symposium, WADS 2009, Banff, Canada, August 21–23, 2009, Proceedings, Lecture Notes in Computer Science 5664, Berlin: Springer, pp. 435-446, ISBN 978-3-642-03366-7, MR 2550627, S2CID 453313, arXiv:0812.5030, doi:10.1007/978-3-642-03367-4_38 .
- Guan, Pengfei; Li, Yan Yan (1994), «The Weyl problem with nonnegative Gauss curvature», Journal of Differential Geometry 39 (2): 331-342, MR 1267893, S2CID 117698037, doi:10.4310/jdg/1214454874.
- Pogorelov, Aleksei V. (1949), «Quasi-geodesic lines on a convex surface», Matematicheskii Sbornik (en ruso) 25 (62): 275-306, MR 0031767.
- Springborn, Boris (2020), «Ideal hyperbolic polyhedra and discrete uniformization», Discrete & Computational Geometry 64 (1): 63-108, MR 4110530, S2CID 203035718, doi:10.1007/s00454-019-00132-8.
| Control de autoridades |
|
|---|
 Datos: Q17003552
Datos: Q17003552