Tenseur des déformations
Le tenseur des déformations est un tenseur symétrique d'ordre 2 servant à décrire l'état de déformation local résultant de contraintes.
L'état de déformation d'un solide est décrit par un champ tensoriel, c'est-à-dire que le tenseur des déformations est défini en tout point du solide. On parle de ce fait de champ de déformation.
Dans le cadre de l'élasticité linéaire, le tenseur des déformations est relié au tenseur des contraintes par la loi de Hooke généralisée.
Définition de l'opérateur des déformations
Le tenseur des déformations vise à caractériser en un point la variation de longueur d'un segment à la suite de la transformation subie par le milieu. La déformation du milieu peut être décrite par la fonction (supposée suffisamment régulière) qui, à un point A du milieu, associe son transformé A' :

Soit un segment AB qui se transforme en A' B'. Le tenseur des déformations permet de quantifier . On a en effet :

On peut donc écrire :

où

est le gradient de la transformation . D'où :


On obtient donc, au premier ordre :

On pose :

est l'opérateur des déformations de Green-Lagrange. Il s'agit d'un tenseur symétrique réel, donc diagonalisable dans une base orthonormée. Les directions propres sont appelées directions principales de déformation.

Si on introduit le vecteur déplacement

on obtient :

en notant la dérivée partielle de et donc :



Cas des petites déformations
Tenseur des déformations linéarisées
Si l'on fait l'hypothèse des petites déformations, on néglige les termes du second ordre et on obtient le tenseur des déformations linéarisé :

Sous forme de composantes dans une base orthonormée :

Interprétation des termes diagonaux

Les termes diagonaux sont les allongements relatifs dans la direction i (selon l'axe xi). Prenons le cas d'un segment [AB], parallèle à l'axe x1, et intéressons-nous à la partie de la déformation également parallèle à x1, que nous noterons [A'B' ].

L'allongement relatif vaut (exprimée en distances algébriques) :

Sachant que
- et


où est la composante de selon l'axe x1, cet allongement vaut :


On reconnaît un taux d'accroissement de la fonction , et si l'on se place en petites déformations, on peut remplacer ce taux d'accroissement par la dérivée de , ce qui donne :

De manière plus générale :

Coefficients dus au cisaillement
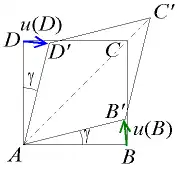
Les autres termes (i ≠ j) sont les , demi-variations de l'angle droit d'un petit volume de matière cubique avant déformation.


En effet, un carré ABCD, où [AB] est parallèle à x1 et [AD] est parallèle à x2, se transforme en un losange AB'C'D' , symétrique selon la première bissectrice du plan.
La tangente de l'angle vaut :
- .

Pour les petites déformations, on a

ainsi que

avec u2(A) = 0. Ainsi,

Si l'on considère maintenant le segment [AD] :

Une rotation n'étant pas une déformation, on peut supposer que les deux angles sont égaux, quitte à faire pivoter le losange et ainsi

Note : dans l'article Déformation élastique, l'angle défini vaut le double de l'angle défini ici.
Variation relative de volume
Considérons un prisme élémentaire engendré par trois vecteurs . Sa transformée par est le prisme engendré par .


Soit V0 celui du prisme initial et V le volume de la transformée.
On a, au premier ordre :

La variation relative de volume est

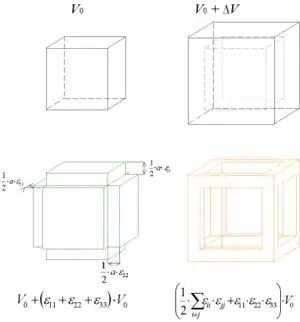
Dans le cas des petites déformations, et det(F) - 1 est égal au premier ordre à la trace de , qui est égale à la trace du tenseur :


On peut retrouver ce résultat en se plaçant dans la base des directions principales de déformation. Considérons un cube d'arête a. Après déformation on a un quasi-parallélépipède de volume :

alors que :

ce qui donne :

comme on est en très faible déformation,
- 1 >> ε ii >> ε ii·ε jj >> ε11·ε22·ε33
d'où le résultat.
On dit qu'il y a cisaillement pur lorsque la trace est nulle, autrement dit lorsqu'il n'y a pas de variation de volume.
Une déformation est dite incompressible si elle s'effectue sans variation de volume en tout point du corps. En particulier, les déformations plastiques s'effectuent sans variation de volume.
Déformations principales
Il existe une base orthonormée telle que le tenseur des contraintes est une matrice diagonale (voir Matrice symétrique > Décomposition spectrale) :

- .

Les directions sont appelées directions principales, et les déformations εI, εII et εIII sont les déformations principales.
Les déformations principales sont les valeurs propres du tenseur, et les directions propres, ses vecteurs propres. Les valeurs propres λ vérifient l'équation

où I est la matrice identité ; les déformations principales sont donc les solutions en λ de cette équation.
Rappelons que la trace est invariante par changement de base (voir Matrices semblables), donc

et ainsi en petites déformations, la variation relative de volume vaut

Contrairement aux contraintes principales, la notion de déformation principale est assez peu utilisée pour le calcul. Elle permet par contre d'exprimer de manière simple l'énergie élastique, et est utile pour dépouiller les résultats d'extensométrie. Par ailleurs, les directions principales sont les mêmes pour le tenseur des déformations et pour le tenseur des contraintes.
Invariants du tenseur des déformations
On définit trois invariants du tenseur, c'est-à-dire trois valeurs qui sont indépendantes de la base :

soit, avec la convention de sommation d'Einstein : ;


ou encore ;


ou encore où eijk est le symbole de Levi-Civita (ou symbole de Ricci). Avec les déformations principales, cela devient :

- ;
- ;
- .



Tenseur isotrope et déviateur
On peut exprimer le tenseur des déformations sous la forme d'un tenseur isotrope E' et d'un déviateur E'' :

avec le tenseur isotrope, également appelé partie sphérique

où I est la matrice unité, et le déviateur de déformation
- .

On a, en utilisant la convention de sommation d'Einstein :
- ;
- ;


où δij est le symbole de Kronecker.
Cette décomposition simplifie l'expression des énergies de déformation élastique de changement de volume et de distorsion.
Voir aussi
Articles connexes
- Tenseur des constantes élastiques (ou des rigidités)
- Tenseur des souplesses
Liens externes
- Émile Mathieu, Traité de physique mathématique (lire en ligne), « Déformations très petites d'un corps solide. » (sur Gallica)
- tenseurs contrainte/déformation - loi de comportement élastique isotrope, orthotrope manuel de référence du logiciel de calcul de structure ICAB Force
 Portail de la physique
Portail de la physique