Compensation de puissance réactive
Le transport de la puissance réactive par les lignes électriques cause des pertes, une diminution de la stabilité du réseau et une chute de tension à son extrémité. Afin d'éviter cela, la compensation de puissance réactive, série ou shunt selon les cas, est utilisée pour limiter ce transport de puissance réactive. Différents appareils électriques peuvent servir à réaliser cette compensation : machines synchrones, batteries de condensateurs, inductance ou FACTS. On distingue les compensations passives, qui fonctionnent en tout ou rien et celles actives qui sont graduelles.
Puissance active et réactive dans une ligne électrique sans perte
Les puissances active P et réactive Q transportées dans une ligne électrique en courant alternatif s'expriment comme suit pour une ligne sans perte[1] :


Où U1 et U2 sont les tensions aux bornes de la ligne, X la réactance de la ligne, δ est l'angle de transport. En résumé, 3 paramètres sont importants : l'amplitude des tensions, l'angle de transport et l'impédance[2]. Pour les réseaux en courant alternatif, le contrôle lie la puissance active à la fréquence d'une part, et la puissance réactive au contrôle de la tension de l'autre[3].
Problème initial
Chute de tension
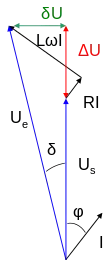
Les lignes électriques constituant le réseau n'étant pas parfaites, la tension proche de la charge, les consommateurs, est plus faible que celle proche de la production, la centrale électrique. Si on considère une ligne constituée d'éléments uniquement résistifs et inductifs, la chute de tension vaut[4] :

Où Rligne est la résistance de la ligne, Xligne sa réactance (qui est également égale à Lligneω avec Lligne l'inductance de la ligne, et ω la pulsation du réseau), I le courant la traversant et le déphasage entre le courant et la tension.

On peut également écrire que [5]

Où P2 est la puissance active transportée, Q2 la puissance réactive et U2 la tension proche de la charge.


D'où


La chute de tension dépend donc à la fois de la puissance active et réactive[5].
Toutefois la résistance de la ligne étant bien plus petite que son inductance, l'expression peut être simplifiée[6] :


Le transfert de puissance active crée une chute de tension en quadrature avec U1, la tension proche de la production. Si l’on suppose, comme c’est le cas en pratique, que ||U2 - U1|| est faible devant U1, on peut conclure que le transport de puissance active induit principalement un déphasage des tensions. Le transfert de puissance réactive crée une chute de tension en phase avec U1. On peut en conclure que le transport de puissance réactive induit principalement une chute des (modules des) tensions[6].
En général plus la puissance qui transite est élevée, plus cette chute de tension est importante. Autrement dit, sans réglage, en cas de forte charge électrique, la tension sera plus basse qu'en cas de faible charge. Le contrôle de cette chute de tension est essentiel pour le pilotage du réseau électrique, il doit la maintenir dans un intervalle ± 10 % environ[7]. Une surtension est dangereuse pour l'isolation diélectrique des matériels, une sous-tension oblige une augmentation du courant transitant pour maintenir la puissance constante et peuvent mener à un écroulement du réseau[8].
Si on note U les tensions, I les courants, indicé 1 pour l'entrée de la ligne, proche de la production, et 2 à la sortie de la ligne, proche de la charge, une ligne électrique modélisée par un modèle en Pi a ses différentes caractéristiques électriques liées par l'équation suivante :



Où l est la longueur de la ligne, la vitesse de phase (voir article angle de transport pour la transition), Zw l'impédance de la ligne.

Pour une ligne sans perte la formule se simplifie en :

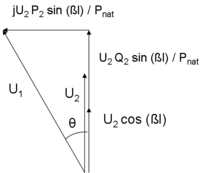
Pour une ligne adaptée la puissance active transportable, appelée « puissance naturelle »[6] ou « puissance virtuelle de la ligne »[9], est égale à :

Note dans ce cas :

Au point 2 la puissance active et réactive consommées par la charge Z sont notées P2 et Q2. On a

D'après les équations matricielles :





La circulation de puissance réactive provoque également des surcharges au niveau des transformateurs de puissance, l'échauffement des câbles d'alimentation et des pertes[10]. En effet les pertes des lignes électriques sont égales à [11] :

Où l est la longueur de la ligne, P la puissance active transportée, la conductivité du conducteur, U la tension entre phases, A la section du conducteur et le facteur de puissance.


Il convient donc de limiter le transport de puissance réactive pour utiliser le réseau au maximum de ses capacités[2]. Autrement dit de produire la puissance réactive là où elle est consommée[12].
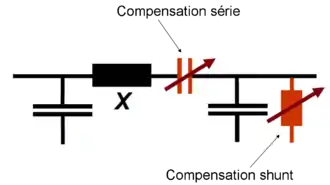
Principe de la compensation
Quand la puissance active transportée par une ligne n'est pas égale à la puissance naturelle, un excès ou un manque de puissance réactive se crée. Cette puissance réactive doit être transportée par la ligne, limitant sa capacité à transporter de la puissance active, il convient donc de la limiter au maximum[13].
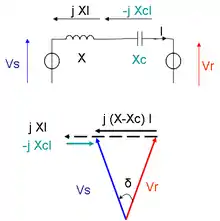
Si la puissance active transportée est trop faible, autrement dit si la ligne a un comportement trop capacitif, typiquement pour un câble, deux possibilités se proposent pour rétablir un comportement neutre pour la puissance réactive : soit augmenter l'inductance série de la ligne soit diminuer la capacité shunt de celle-ci. La première solution pose le problème d'augmenter l'angle de transport : il est égal à , avec ω la pulsation du réseau, ce qui diminue la stabilité du réseau. La solution privilégiée est donc de diminuer la capacitance shunt en connectant une bobine en parallèle à la ligne. On parle de compensation shunt[13].

De même si la puissance active transportée est trop élevée, autrement dit si la ligne a un comportement trop inductif, pour les longues lignes aériennes typiquement, 2 possibilités se proposent également : augmenter la capacité en parallèle ou diminuer l'inductance. Pour les mêmes raisons de stabilité que précédemment, la diminution des paramètres est à privilégier. On parle de compensation série[13].
Valeur de la compensation
La puissance réactive consommée par une inductance L traversée par un courant I dans un système triphasé de pulsation ω est :

La puissance réactive produite par une capacité C ayant à ses bornes la tension U, dans un système triphasé est :

Dans le cas d'une compensation parallèle, on définit kp le coefficient de compensation comme suit[13] :

D'où


Pour la compensation série[13] :



Consommateurs de puissance réactive
Les principaux consommateurs de puissance réactive en dehors des lignes elles-mêmes sont[10] :
- les moteurs asynchrones ordinaires ;
- les lampes à ballast magnétiques à fluorescence ou à décharge ;
- les fours à induction et à arc ;
- les machines à souder ;
- les stations à courant continu LCC[14].
Producteurs de puissance réactive
Les principaux producteurs de puissance réactive sont les câbles électriques. Les installations à courant continu VSC, les FACTS et les moteurs/générateurs synchrones peuvent également en produire mais sont réglables, ils ne posent donc pas de problème et ne nécessitent normalement pas de compensation.
En pratique
Les générateurs électriques produisent de la puissance réactive, toutefois leur apport n'est pas assez important dans les réseaux actuels[15]. Différents appareils électriques sont utilisés pour réaliser de la compensation électrique : machines synchrones, batteries de condensateurs et les inductances, FACTS[16]. On distingue les compensations passives, qui fonctionnent en tout ou rien et les compensations actives qui sont graduelles[17].
La machine synchrone était auparavant la plus utilisée mais sa vitesse de réaction est assez lente et demande un entretien important[16].
Les bobines statiques ont le défaut d'être lourdes et coûteuses. Les capacités sont au contraire relativement peu chères. Elles apportent en revanche de la puissance réactive par étages, c'est-à-dire en suivant une fonction escalier. Leur connexion ou déconnexion est commandées par des disjoncteurs. Ils sont réglables et produisent peu de pertes. Elles sont adaptées aux variations de consommation de puissance réactive lentes, mais pas aux changements brusques (défauts). Ils peuvent être installés dans les postes THT/HT, mais également dans les postes HT/MT. Dans ce dernier cas, leur dimensionnement doit correspondre à la charge locale et à sa consommation en puissance réactive[18].
L'usage d'électronique de puissance permet de réaliser la compensation de manière plus économique. Ainsi les compensateurs statiques sont constitués par l’ensemble de condensateurs et d’inductances commandées par thyristors, montés en tête-bêche dans chaque phase. Chacun d’entre eux étant ainsi conducteur pendant une demi- période. La puissance réactive absorbée par l’inductance varie en contrôlant la valeur efficace du courant qui la traverse par action sur l’angle d’amorçage des thyristors[18]. On parle de FACTS (« Flexible AC Transmission system »)[19],[16]. Ils sont apparus dans les années 1970[20]. Les FACTS ont l'avantage d'être à la fois flexibles et rapides, permettant ainsi d'amortir les oscillations dans le réseau[21].
Les stations des lignes à courant continu dite en « source de tension » peuvent également produire de la puissance réactive[22]..
Les transformateurs déphaseurs n'influent pas sur la puissance réactive et ne sont donc pas des compensations. Ils influent par contre sur le transfert de puissance active, tout comme les FACTS[23].
Voir aussi
Bibliographie
- (en) Wolfgang Hoffman, Jürgen Schlabbach et Wolfgang Just, Reactive power compensation : a practical guide, Chichester, Wiley, , 304 p. (ISBN 978-0-470-97718-7, lire en ligne)
- (en) Damian Obioma Dike, Index based reactive power compensation scheme for power regulation (lire en ligne)
- Rachida Haimour, Contrôle des Puissances Réactives et des Tensions par les Dispositifs FACTS dans un Réseau Électrique, Ecole Normale Supérieure de l’Enseignement Technologique d’Oran, (lire en ligne)
- (de) Joseph Kindersberger, Grundlagen der Hochspannungs- und Energieübertragungstechnik, TU Munich,
Notes et références
- Haimour 2009, p. 36
- Dike, p. 2-6
- Haimour 2009
- Hoffman, Schlabbach et Just 2012, p. 28
- (en) S. Sivanagaraju et G. Sreenivasan, Power System operation and control, Dorling Kindersley, , 612 p. (ISBN 978-81-317-2662-4, lire en ligne), p. 363
- Thierry Van Cutsem, Analyse et fonctionnement des systèmes d'énergie électrique, université de liège, (lire en ligne)
- Haimour 2009, p. 11
- Haimour 2009, p. 28
- Haimour 2009, p. 40
- « La compensation de l’énergie réactive » (consulté le )
- Hoffman, Schlabbach et Just 2012, p. 24
- Haimour 2009, p. 16
- Kindersberger 2009, p. 242
- Cigré 492 2012, p. 14
- Haimour 2009, p. 17
- Hansruedi Bühler, Réglage de systèmes d'électronique de puissance, Lausanne/diff. Tec & doc-Lavoisier, presses polytechniques et universitaires romandes, , 236 p. (ISBN 2-88074-397-4, lire en ligne), p. 9
- Haimour 2009, p. 37
- Haimour 2009, p. 18
- (en) Reactive power management, New Delhi, Tata McGraw Hill, , 722 p. (ISBN 978-0-07-050303-8, lire en ligne)
- Haimour 2009, p. 60
- Haimour 2009, p. 35
- (en) Groupe de travail B4.46, Voltage Source Converter (VSC) HVDC for Power Transmission – Economic Aspects and Comparison with other AC and DC Technologies, Cigré, coll. « Brochure », , chap. 492, p. 23
- Théodore Wildi, Electrotechnique, Deboeck, (lire en ligne)
 Portail de l’électricité et de l’électronique
Portail de l’électricité et de l’électronique  Portail de l’énergie
Portail de l’énergie