Contrôle d'attitude
Le contrôle d'attitude est le processus qui permet de contrôler l'attitude (c'est-à-dire l'orientation dans l'espace) d'un engin aérospatial : aéronef, missile ou véhicule spatial tels qu'un satellite artificiel, une sonde spatiale, une station spatiale ou un lanceur - de manière à ce que cet engin puisse remplir ses objectifs. Un engin aérospatial, même placé dans l'espace, subit des forces qui modifient plus ou moins rapidement son orientation. Pour maintenir celle-ci il dispose d'un système de contrôle d'attitude qui comprend des capteurs pour déterminer son orientation, d'un logiciel pour déterminer l'écart par rapport à l'orientation souhaitée et d'actionneurs pour corriger si nécessaire l'orientation.
De nombreuses techniques peuvent être utilisées pour contrôler l'attitude d'un engin aérospatial. Celles-ci dépendent principalement des exigences à satisfaire et de l'environnement (atmosphère terrestre, orbite terrestre basse, orbite terrestre haute, espace interplanétaire). Un engin spatial par exemple peut être stabilisé de manière passive (spinné c'est-à-dire maintenu en rotation autour de son axe principal ou stabilisé par gradient de gravité) ou de manière active.
Définition
Le système de contrôle d'attitude désigne l'ensemble des équipements et algorithmes mis en œuvre de manière autonome sur un engin aérospatial - aéronef, missile ou véhicule spatial tels qu'un satellite artificiel, une sonde spatiale, une station spatiale ou un lanceur - afin de lui permettre de contrôler précisément son attitude, c'est-à-dire son orientation dans l'espace autour de son centre de gravité : position angulaire et vitesse angulaire dans le référentiel fourni par les étoiles.
Pour les engins spatiaux le contrôle d'attitude se distingue du contrôle d'orbite, qui consiste à contrôler l'orbite ou la trajectoire interplanétaire du véhicule spatial dans l'espace. Néanmoins, les systèmes de contrôle d'attitude et d'orbite sont souvent étroitement liés et un engin spatial est généralement doté d'un « système de commande d'attitude et d'orbite » (SCAO) combinant ces deux fonctions. Contrairement à l'attitude, la position d'un véhicule spatial (restitution d'orbite) lorsqu'il se trouve en orbite terrestre est déterminée à partir de mesures effectuées par les stations terriennes.
Ce qui suit traite plus particulièrement des engins spatiaux (lanceur spatial, satellite, sonde spatiale).
Objectifs
Le contrôle d'attitude assure deux fonctions essentielles :
- il contribue à la survie du véhicule spatial[1].
- Un véhicule spatial doit en effet être en permanence capable d'orienter ses panneaux solaires vers le Soleil afin de recharger ses accumulateurs lorsque cela est nécessaire et donc de connaitre la direction de celui-ci. Si le niveau des accumulateurs descend en dessous d'un certain seuil, ceux-ci deviennent inutilisables et, privé d'énergie, l'engin spatial ne peut plus remplir sa mission. Une interruption de l'alimentation en énergie entraine la perte du contrôle thermique qui lui-même produit des dégâts irrémédiables à certains composants de l'engin spatial (notamment les accumulateurs) qui ne peuvent survivre que dans une plage de températures donnée.
- L'orientation des faces du satellite relativement à la direction du Soleil (et dans une moindre mesure de la Terre et de la Lune) affecte parfois considérablement le contrôle thermique du satellite. La chaleur excédentaire produite par l'électronique du bord est évacuée par des radiateurs qui doivent rester en permanence à l'ombre pour remplir leur fonction.
- Pour modifier l'orbite ou la trajectoire d'un engin spatial (engin spatial stabilisé 3 axes), l'orientation de la poussée des moteurs doit être alignée avec la direction du déplacement souhaité. Durant le fonctionnement des moteurs, il est nécessaire de corriger les dysmétries de la poussée qui génèrent des écarts dans sa direction par rapport à l'azimut visé.
- Généralement les capteurs optiques d'un télescope spatial ne doivent pas être exposés à la lumière directe du Soleil.
- Il est nécessaire pour remplir les objectifs de la mission[1]
- Une majorité d'engins spatiaux (par exemple les satellite de télécommunications, la plupart des sondes spatiales explorant le système solaires, les satellites d'observation de la Terre, les satellites militaires, les télescopes spatiaux) doivent pouvoir pointer leur charge utile (antenne, télescope, autre instrument d'observation...) de manière très précise vers des zones géographiques données. Par exemple, pour un satellite de télécommunications, évoluant à 36 000 km environ, une erreur de pointage de 0,1° correspond à une erreur au sol de 63 km.
Forces perturbant l'attitude d'un engin spatial
Il est nécessaire de contrôler en permanence l'attitude d'un engin spatial car celui-ci, même lorsqu'il circule dans l'espace interplanétaire loin de toute planète, subit différentes forces externes qui progressivement vont modifier son attitude. L'importance de ces forces dépendent dans certains cas du type d'orbite de l'engin spatial[2],[3] :
- Le gradient vertical du champ de gravité local (celui de la Terre pour les satellites en orbite autour de celle-ci) : le champ de gravité exerce une force plus importante sur la partie de l'engin spatial la plus proche de la surface de la planète.
- Le champ magnétique ambiant (champ magnétique terrestre) en interagissant avec les matériaux magnétiques et les boucles de courant présents dans l'engin spatial peuvent générer des couples significatifs.
- La force de trainée de l'atmosphère résiduelle lorsque l'engin spatial se trouve sur une orbite terrestre basse. Elle exerce généralement un couple car la section de l'engin spatial qui la subit n'a le plus souvent pas une forme symétrique.
- La pression de rayonnement des photons solaires qui du fait de l'incidence du rayonnement lumineux et de la forme de l'engin spatial exerce une poussée dissymétrique par rapport à son centre de gravité.
- Le rayonnement radiofréquence des satellites de télécommunications peut produire un couple perturbateur significatif.
- L'asymétrie des forces produites par les propulseurs lorsqu'ils sont utilisés.
- L'attitude d'un engin spatial est également perturbée par des mouvements internes : déploiement des panneaux solaires ou d'antennes, ballotement des ergols dans les réservoirs, mouvement du miroir de la caméra d'un satellite d'observation de la Terre, déplacement de l'équipage d'un vaisseau spatial, etc.
| Type de perturbation | Satellite en orbite géostationnaire | Satellite en orbite terrestre basse |
|---|---|---|
| Irrégularité du champ de gravité | Négligeable | 10-3Nm |
| Pression aérodynamique | Négligeable | 10-4Nm |
| Couple magnétique | 10-6Nm | 10-3Nm |
| Pression de radiation solaire | 10-6 à 10-4Nm | 10-4Nm |
| Couple radio-fréquence | 10-6Nm | N/A |
| Mauvais alignement des tuyères (manœuvre de contrôle d'orbite) | 10-2 à 10-1Nm | N/A |
| Mauvais alignement du moteur d'apogée (manœuvre de mise à poste) | Quelques Nm | N/A |
| Déplacement d'équipements | 10-2Nm | 10-1Nm à quelques Nm |
Méthodes de contrôle d'attitude des engins spatiaux
Il existe deux catégories de méthode de contrôle d'attitude des engins spatiaux : le contrôle actif qui est le plus utilisé et le contrôle passif.
Contrôle d'attitude passif
Le contrôle passif possède les avantages d'être robuste, bon marché, simple et ne consommant pas de puissance. La précision de pointage est toutefois limitée et il ne permet pas de répondre à tous les besoins. Le pointage actif est donc utilisé dans la plupart des satellites de taille importante[5].
Il existe deux types de contrôle passif : la stabilisation par gradient de gravité et la stabilisation par giration :
- La stabilisation par gradient de gravité utilise l'asymétrie du satellite et le champ de gravité [6].
- Avec la stabilisation par giration l'engin spatial est lancé en rotation autour d'un de ses axes (cela permet de stabiliser un axe du satellite, en utilisant le phénomène de raideur gyroscopique) ; ce type de plate-forme permet de scanner rapidement une bande au sol (par exemple pour un satellite météorologique), d’étudier l'espace environnant dans de multiples directions (par exemple pour un satellite scientifique analysant le plasma de l'ionosphère), ou bien de balayer l’ensemble de la voûte céleste (comme les satellites Planck ou Gaia)[7].
Contrôle d'attitude actif
Il existe deux modes de contrôle d'attitude actif :
- La stabilisation sur trois axes actifs. Celle-ci utilise un actionneur par axe contrôlé de l'engin spatial. Les actionneurs peuvent être des roues de réaction ou des actionneurs gyroscopiques. La plupart des satellites d'observation et des sondes spatiales utilisent ce type de méthode[8].
- Le système à moment cinétique embarqué. L'engin spatial embarque une seule roue montée sur l'axe tangage du satellite. Celle-ci est maintenue à vitesse constante pour fournir une raideur gyroscopique sur deux axes comme si le satellite était spinné. Cette méthode est utilisée par certains satellites de télécommunications en orbite géostationnaire avec un moment cinétique embarqué sur l'axe nord/sud[9].
Il existe également des véhicules dits "dual-spin" qui combinent les deux techniques : ils comprennent un sous ensemble stabilisé sur les trois axes et un deuxième sous-ensemble stabilisé par rotation. C'était par exemple le cas de la sonde spatiale Galileo dont la plateforme était stabilisée par rotation, tandis que les instruments de télédétection (caméras, spectromètres...) était stabilisée pour pouvoir être pointée vers les corps célestes survolés.
Architecture d'un système de commande d'attitude et d'orbite
Vue d'ensemble
À bord d'un engin spatial, le contrôle de l'attitude est pris en charge par le système de contrôle d'attitude. Celui-ci comprend trois sous-ensembles :
- les capteurs : leur rôle est de mesurer l'attitude (et parfois la position) du véhicule spatial ;
- les actionneurs : leur rôle est de modifier l'attitude et la position du véhicule spatial ;
- le logiciel du système de contrôle d'attitude : il est chargé d'estimer l'attitude (et éventuellement la position) à partir des mesures des capteurs, d'estimer les corrections à apporter compte tenu des objectifs de la mission et de commander les actionneurs pour corriger l'attitude.
Les capteurs optiques
Les capteurs optiques sont systématiquement utilisés à plusieurs exemplaires. En effet un seul point sur la sphère céleste (étoile, Soleil) n'est pas suffisant pour définir l'attitude d'un véhicule spatial. En effet, un point sur la sphère céleste est défini par son ascension droite et sa déclinaison, alors qu'il faut trois angles indépendants (précession, nutation, rotation propre) pour définir de manière unique l'attitude d'un véhicule spatial.
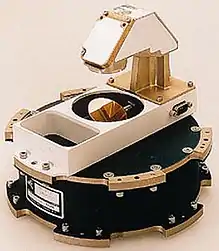
Capteur solaire

Le capteur solaire utilise comme référence le Soleil pour déterminer (partiellement) l'attitude de l'engin spatial. Avec son diamètre d'un demi-degré depuis la Terre, sa forte luminosité et sa position parfaitement connue, le Soleil est une référence d'attitude simple à exploiter qui est la plus couramment utilisée par les engins spatiaux. Elle est en particulier utilisée pour obtenir une première mesure grossière de l'attitude et orienter l'engin spatial immédiatement après le largage par son lanceur ou à la suite d'une perte de contrôle de l'orientation (passage en mode survie). On distingue d'une part les capteurs analogiques (grossiers) rudimentaires et légers qui fournissent une attitude peu précise ou qui se contentent d'indiquer la présence du Soleil dans le champ de vue et d'autre part les capteurs digitaux qui permettent d'atteindre une précision de 0,5 degrés. Le capteur solaire comprend un baffle (fente, fenêtre,..) et, à une certaine distance de celui-ci, un détecteur constitué soit de plusieurs cellules solaires au silicium qui mesurent l'énergie reçue (capteurs analogiques) soit de photodétecteurs (barrette ou matrice) à transfert de charges (capteurs digitaux). La direction du Soleil est déterminée en mesurant l'intensité du flux lumineux qui dépend de l'angle d'incidence du rayonnement lumineux. Un senseur analogique très simple à fente comprenant deux cellules solaires permet de déterminer la position du Soleil avec une précision de 0,5° avec un champ de vue de 20°. Les capteurs digitaux peuvent atteindre une précision 0,01°[10],[11].
Capteur d'horizon de Terre

Le capteur d'horizon de Terre est utilisé par les engins spatiaux en orbite autour de la Terre. Il permet de déterminer l'attitude de l'engin spatial dans le référentiel terrestre (dont les trois axes sont liés au globe terrestre) en tangage et en roulis mais ne peut mesurer les mouvements de lacet (autour de l'axe perpendiculaire à la surface de la Terre. Ce capteur détermine le contour de la Terre (l'horizon terrestre). Pour y parvenir il mesure l'intensité du rayonnement rayonnement solaire renvoyé par l'atmosphère terrestre sous forme de chaleur (infrarouge). Généralement c'est la bande spectrale 14 à 16 microns qui est observée ce capteur. Celle-ci caractérise la bande d'absorption du dioxyde de carbone (CO2) présent dans l'atmosphère. Ce capteur peut être utilisé aussi bien en orbite basse qu'en orbite géostationnaire terrestre[12]. La précision de la mesure est limitée par l'épaisseur de la couche de CO2 dont le centre peut varier d'environ 20 kilomètres. Les technologiques qui étaient utilisées à la fin des années 1990 permettaient d'obtenir une précision de 0,07 degrés en orbite basse (capteur à balayage) et en orbite géostationnaire de 0,025 degrés (capteur à balayage), 0,1° (capteur oscillant) et 0,04° (capteur statique)[13],[14].
Capteur stellaire

Le capteur stellaire ou viseur stellaire ou viseur d'étoiles est le capteur optique qui permet d'obtenir la plus grande précision. Il comprend une caméra qui prend des images d'une zone du ciel à l'aide d'un détecteur de type dispositif à transfert de charge (CCD). Un logiciel analyse le champ d'étoile imagé et, en le rapprochant d'un catalogue recensant la position des étoiles les plus lumineuses, détermine l'attitude du véhicule spatial. La précision obtenue est excellente car les étoiles constituent des sources lumineuses ponctuelles (contrairement au Soleil et à la Terre) et leur position est connue avec une incertitude inférieure à la seconde d'arc. Plusieurs modes de fonctionnement sont possibles. En mode acquisition, afin de limiter le temps de traitement, seule un sous-ensemble de l'image réduit à quelques dizaines de pixels (fenêtre d'acquisition) est explorée par le logiciel pour rechercher l'étoile retenue pour effectuer la mesure. Cette fenêtre est déterminée par le système de contrôle d'attitude à partir des autres capteurs ou déduite par reconnaissance du motif formé par les étoiles visibles dans le capteur par rapprochement avec un catalogue des étoiles en mémoire. En mode poursuite , après que l'étoile ait été détectée en mode acquisition, un processus itératif suit sa position en recherchant les pixels les plus brillants. Pour permettre une fréquence de suivie rapprochée, seule une fraction de l'image capturée est analysée (la fenêtre de poursuite). Dans ce mode les capteurs les plus élaborés permettent de suivre plusieurs étoiles en parallèle. Pour les télescopes spatiaux, on utilise souvent l'instrument lui-même comme capteur stellaire. En effet, la résolution d'une caméra étant, du fait de la diffraction (il n'y a pas de turbulences atmosphériques dans l'espace), essentiellement liée au diamètre du dispositif optique qui collecte la lumière (miroir ou lentille primaire), l'utilisation de l'instrument principal comme capteur d'attitude permet d'atteindre une précision inférieure à la seconde d'arc, souvent nécessaire aux observations[15],[16].
Gyromètre

Les mesures effectuées par les différents capteurs cités fournissent des informations sur la position angulaire et la vitesse angulaire autour des trois axes qui peuvent être espacées pour différentes raisons (étoiles masquées par la Terre, ...) de plusieurs minutes. Pour disposer d'informations d'attitude actualisées l'engin spatial utilise des gyromètres qui fournissent les composantes du vecteur vitesse de rotation dans un référentiel inertiel (par rapport aux étoiles) suivant le ou les axes du gyromètre. En partant de la dernière position angulaire connue et en cumulant les informations sur la vitesse angulaire fournies par les gyromètres, le sous-système de contrôle d'attitude détermine la nouvelle position angulaire. Toutefois la précision des mesures fournies par le gyromètre se dégrade avec le temps à une vitesse qui dépend de la technologie employée. Il doit donc être périodiquement recalé à l'aide de données fournies par des capteurs fournissant une position réelle : capteurs solaires, senseurs d'horizon terrestre ou viseurs d'étoiles[17].
Le gyromètre mécanique exploite le fait que le vecteur du moment angulaire d'un corps en rotation reste constant si aucune force y est appliquée: en suspendant une masse en rotation dans plusieurs cardans emboités, on peut mesurer la rotation de l'engin spatial par rapport au gyromètre qui lui reste fixe dans le référentiel inertiel. La précision de ce type de capteur est très élevée mais il est pénalisé par sa masse, la rapidité avec laquelle sa précision se dégrade (il est difficile d'éliminer complètement les frottements) et le taux de défaillance (mécaniques en mouvement). Dès les années 1960 d'autres types de gyromètres sont étudiés puis mis au point. Le gyrolaser mesure le délai généré par la rotation de l'engin spatial entre le temps de parcours de deux faisceaux laser envoyé dans des directions opposées. Plus léger il supprime la plupart des pièces mécaniques en mouvement mais il est couteux à produire. Des variantes comme le gyrolaser à fibre optique, fait circuler le rayon laser dans une fibre optique ou le le gyromètre résonant ont été mises au point[17].
Magnétomètre
Le magnétomètre à induction (ou fluxmètre) est un instrument qui mesure la variation, dans le temps, du flux du champ magnétique à travers une surface fixe par rapport au véhicule spatial. Il est principalement utilisé sur les véhicules spatiaux en rotation en orbite terrestre basse..
Le magnétomètre fluxgate est un instrument qui mesure la projection du champ magnétique au voisinage du véhicule spatial sur un axe. À l'aide de la carte du champ magnétique terrestre et de trois magnétomètres (en théorie, deux suffisent, si on connaît précisément le module du champ magnétique terrestre au point et à l'instant considéré), connaissant la position sur orbite, on peut obtenir une information (incomplète) sur l'attitude du véhicule spatial. Ces instruments sont sensibles aux perturbations électromagnétiques générées par les équipements des véhicules spatiaux (en particulier les actionneurs à couple magnétique) et ils sont donc souvent éloignés des dispositifs perturbateurs (par exemple en les plaçant à l'extrémité d'une perche fixée au corps du véhicule spatial). Les magnétomètres dans les SCAO peuvent aussi être utilisés pour déterminer précisément le champ magnétique terrestre afin de calculer la commande sur des actionneurs à couple magnétique (magnéto-coupleurs). L'intensité du champ magnétique décroissant rapidement avec l'altitude, l'usage de magnétomètres pour la détermination de l'attitude est réservé aux satellites en orbite terrestre basse[18].
Récepteur GPS
Les satellites en orbite terrestre basse peuvent utiliser les informations des systèmes de positionnement par satellites (GPS, GLONASS, EGNOS...) pour déterminer leur position[19].
Interféromètre radio
La mesure par interférométrie du déphasage entre les signaux de plusieurs récepteurs (antennes disposées sur le véhicule spatial) écoutant une onde radio (émise par exemple par un satellite GPS), permet d'obtenir des informations sur l'attitude du véhicule spatial, si la direction incidente est connue dans un repère de référence.
Synthèse
| Capteur | Précision (degrés) | Avantages/inconvénient | Domaines d'application |
|---|---|---|---|
| Capteur solaire | 0,01 à 0,1 | Simple, fiable, bon marché | Utilisation intermittente |
| Capteur horizon de Terre | 0,02 à 0,03 | Couteux, peu performant, mesure approximative du lacet | Orbite basse |
| Magnétomètre | 1 | Peu couteux, couverture permanente | Orbite terrestre basse |
| Viseur d'étoiles | 0,001 | Couteux, lourd, complexe, précision élevée | |
| Gyroscope | 0,01 / heure | Fournit la meilleure référence à court terme, couteux |
Les actionneurs
Un engin spatial peut utiliser différents types d'actionneurs pour corriger son orientation lorsque les capteurs indiquent que celle-ci n'est pas conforme. Le choix des actionneurs installés et mis en œuvre dépend de plusieurs facteurs tels que l'orbite et les exigences de la mission spatiale.
Principe d'action et de réaction
Pour faire tourner le satellite autour d'un axe, c'est le principe d'action-réaction qui est utilisé, sous deux formes possibles.
- Action/réaction interne au satellite :
- équipement : roue de réaction ;
- principe : un moteur électrique, rigidement lié à un axe satellite, exerce un couple afin de mettre en rotation la roue autour de cet axe ;
- action : couple exercé par le satellite sur le moteur, qui provoque une rotation de la roue ;
- réaction : couple opposé exercé par la roue sur le satellite, qui met en rotation le satellite sur le même axe mais dans un sens opposé ;
- conséquence : conservation du moment cinétique total du satellite.
- Un autre système, appelé actionneur gyroscopique, entre également dans la classification d'action-réaction interne au satellite. Son principe, plus complexe, s'appuie sur l'effet gyroscopique. Il a notamment l'avantage d'être plus dynamique et par là de conférer une agilité supérieure au satellite.
- Action/Réaction avec l'extérieur du satellite :
- équipement : tuyères ;
- principe : le même que celui d'un avion à réaction : des particules sont éjectées de tuyères suivant une direction donnée ;
- action : force exercée par le satellite sur les particules éjectées ;
- réaction : force opposée exercée par les particules sur le satellite suivant un axe qui ne passe pas par le centre de gravité du satellite : effet de bras de levier qui résulte en une rotation du satellite sur lui-même ;
- conséquence : variation du moment cinétique total du satellite du fait de l'action d'un couple externe.
On peut aussi citer les magnéto-coupleurs, qui utilisent le champ magnétique terrestre pour appliquer un couple externe au satellite et modifier ainsi le moment cinétique global du satellite.
Propulseurs de type RCS
Les Reaction Control System (RCS) (en français système de pilotage par jets de gaz) sont des propulseurs de faible poussée (fraction de Newton à quelques Newtons), qui sont allumés brièvement pour exercer une force faisant pivoter l'engin spatial par réaction. Pour pouvoir agir avec efficacité dans les trois axes, ils sont regroupés en grappes de propulseurs pointant dans trois directions perpendiculaires les unes des autres. Ces grappes sont généralement placées de manière à exercer le couple le plus important. Ces propulseurs peuvent être chimiques (moteur-fusée à ergols liquides), ioniques ou utiliser des gaz froids (engins spatiaux de petite taille comme les CubeSats). Le principal inconvénient des RCS est qu'il consomme des ergols et que donc leur fonctionnement est limité par la masse des consommables emporté. Ils peuvent être utilisés également pour effectuer des corrections d'orbite ou de trajectoire interplanétaire[21]
Roue de réaction
Une roue de réaction est un dispositif comprenant un et un volant d'inertie tournant à grande vitesse sous l'impulsion d'un moteur électrique. Le moteur électrique est utilisé pour faire varier à la demande la vitesse du volant d'inertie. Lorsque celle-ci est modifiée, l'engin spatial tourne dans le sens opposé au sens de rotation du moteur, de manière proportionnelle par conservation du moment angulaire. Un engin spatial emporte généralement trois roues de réaction dont les axes sont perpendiculaires les uns aux autres, pour réorienter l'engin spatial dans n'importe quelle direction. Des roues supplémentaires sont souvent ajoutées pour suppléer à la défaillance de l'une d'entre elles. À la longue, une roue de réaction finit par saturer c'est-à-dire que les différentes corrections effectuées finissent par lui faire atteindre une vitesse de rotation soit trop basse, soit trop élevée. Il faut alors « désaturer » la roue de réaction, c'est-à-dire augmenter ou réduire la vitesse de rotation sans pour autant changer l'orientation de l'engin spatial. Ce peut être réalisé à l'aide d'un système de propulsion conçu pour cet usage ou, si l'engin spatial se trouve sur une orbite suffisamment basse autour d'une planète dotée d'un champ magnétique, à l'aide de magnéto-coupleurs[22],[23].
Les roues de réaction sont la principale alternative à l'utilisation de propulseurs pour contrôler l'orientation d'un engin spatial. Elles permettent de réduire fortement la quantité d'ergols emportés car le moteur électrique est alimenté par l'énergie fournie par les panneaux solaires (Il en faut néanmoins un minimum pour les désaturer périodiquement) ce qui permet d'augmenter la proportion de la masse consacrée à la charge utile. Elles permettent des mouvements de rotation rapide, une exigence fréquente pour les satellites d'observation de la Terre ou les sondes spatiales survolant d'autres planètes. En contrepartie, la roue de réaction est un mécanisme en mouvement sujet à l'usure et l'arrêt prématuré des missions spatiales de longue durée est souvent lié à la défaillance de ce type d'équipement.
Actionneur gyroscopique

Les couples exercées par les roues de réaction ont une valeur limitée. Lorsque l'engin spatial a une inertie importante (stations spatiales), il est nécessaire de créer des couples plus importants. Ces engins embarquent des actionneurs gyroscopiques capables de développer des couples de plusieurs centaines de Newtons-mètres soit cent fois plus qu'une roue de réaction[24] . Une actionneur gyroscopique est constitué d'une roue de masse élevée formant un volant d'inertie tournant à vitesse constante. Pour modifier l'orientation de l'engin spatial, l'axe de rotation de l'actionneur gyroscopique est incliné à l'aide de moteurs électriques. Aucune force externe au satellite n'intervient et le moment cinétique de l'ensemble « CMG + satellite » est conservé : la rotation du CMG entraine donc celle de l'engin spatial en sens inverse. En utilisant trois CMG, on peut contrôler l'orientation d'un engin spatial dans les trois dimensions[25].
Magnéto-coupleur
Le magnéto-coupleur utilise le le champ magnétique ambiant du milieu dans lequel évolue le satellite, par exemple celui de la Terre pour générer un couple . Il est constitué d’aimants électromagnétiques ou bobines qui sont combinés pour créer un champ magnétique asymétrique tournant. Le champ magnétique produit est contrôlé en faisant varier l’alimentation des électroaimants en courant électrique. L’interaction entre le champ magnétique ambiant (par exemple celui produit par la magnétosphère terrestre) et celui produit par les électroaimants crée un couple qui fait pivoter l'engin spatial. Généralement trois électroaimants sont installés perpendiculairement les uns par rapport aux autres pour permettre le contrôle de l'engin spatial dans les trois axes. Mais ce nombre peut être réduit lorsque d'autres dispositifs prennent en charge la stabilisation sur certains axes[26].
Les magnéto-coupleurs sont des dispositifs simples et légers qui ne dépendent pas de la quantité d'ergols emportés puisque ils sont alimentés par l'énergie solaire fournie par les panneaux solaires. Mais ils ne sont efficaces qu'en présence d'un champ magnétique local suffisamment puissant ce qui exclut leur utilisation lorsque l'engin spatial circule sur une orbite terrestre moyenne ou haute ainsi que lorsqu'il se trouve en orbite autour d'une planète/lune dépourvu d'un champ magnétique significatif (Lune, Mars, Mercure...). Leur action peut également perturber le fonctionnement d'instruments de mesure embarqués.
Synthèse
| Capteur | Précision (degrés) | Avantages/inconvénient | Domaines d'application |
|---|---|---|---|
| Stabilisation par giration | 0,1 | Passif, simple, cout réduit | Contraintes pour la charge utile |
| Stabilisation par gradient de gravité | 1 à 3 | Passif, simple, cout réduit, peu précis | Orbite basse, adapté qu'à certaines missions |
| RCS | 0,1 | Rapide, efficace, couteux, dépendant de consommables | |
| Magnéto-coupleur | 1 à 2 | Lent, léger, faible cout | Orbite terrestre basse |
| Roue de réaction | 0,01 | Rapide, couteux, précision élevée | |
| Actionneur gyroscopique | 0,1 | Efficace, rapide, couteux, lourd |
Le système de contrôle d'attitude
Le système de contrôle d'attitude (SCA) est le sous-système qui contrôle l'orientation de l'engin spatial et les éléments amovibles (panneaux solaires, plate-forme d'instruments...) en s'appuyant sur les données fournies par les capteurs et en mettant en œuvre les actionneurs :
- des panneaux solaires ;
- des instruments : cela comprend les antennes, la charge utile, les instruments du système de contrôle d'attitude lui-même ; en particulier, il assure la survie des instruments en tenant garde à ce qu'aucun instrument ne pointe une direction qui pourrait le détruire du fait de sa forte sensibilité (généralement la Lune, la Terre et surtout le Soleil pour les satellites en orbite terrestre) ;
- des tuyères : lors des manœuvres de contrôle d'orbite, il est absolument nécessaire d'orienter convenablement le système propulsif ;
- du sous-système de contrôle thermique.
Le contrôle d'attitude, par la diversité et la complexité des disciplines de l'ingénierie qu'il met en œuvre, est une discipline à part entière pratiquée par quelques spécialistes travaillant chez les acteurs majeurs du domaine spatial ou dans des milieux universitaires. Ce domaine fait appel à la mécanique, la physique, l'automatique et aux mathématiques (algèbre principalement).
Exemples de mise en œuvre
Le télescope spatial James Webb
Parmi tous les engins spatiaux, les télescopes spatiaux font partie de ceux dont les exigences sont les plus fortes dans le domaine du contrôle d'attitude. Ils ont besoin de pouvoir pointer leur optique avec une précision très élevée. Les temps d'exposition très long (éventuellement plusieurs heures) nécessitent de maintenir ce pointage sur de longues périodes. Pour le télescope James Webb (JWST), opérationnel depuis 2022, la précision du pointage est supérieure à 0,10 secondes d'arc, la stabilité de pointage est de 6,7 millisecondes d'arc sur une période de 10000 secondes (objet observé "fixe") ou de 1000 secondes (objet "mouvant" c'est à dire dans le système solaire). Pour suivre un objet mouvant, le télescope peut modifier son pointage à une vitesse maximale de 30 millisecondes d'arc[28].
Le système de contrôle d'attitude du JWST utilise des capteurs solaires, des viseurs d'étoiles et des gyromètres pour déterminer l'orientation et les mouvements de rotation du télescope spatial. Les roues de réaction sont utilisées pour corriger et maintenir l'orientation. Les viseurs d'étoiles sont utilisés pour permettre un premier pointage grossier (précision de 8 secondes d'arc). Les deux capteurs de ce type ont un champ de vue de 16° et ont un détecteur de 512 x 512 pixels. Leur axe de visée fait un angle de 45° avec celui de l'optique du télescope et entre eux. Pour déterminer l'orientation du télescope spatial ils repèrent les étoiles d'une magnitude supérieure à 6 qu'ils comparent à un catalogue d'étoiles stocké en mémoire. Une fois ce premier pointage effectué, l'instrument de pointage fin (FGS), qui utilise l'optique du télescope, prend le relais pour l'affiner puis le maintenir. Le FGS, utilisant comme repère une étoile guide unique pour atteindre la précision de pointage de 0,1 secondes d'arc. Le FGS transmet toutes les 64 millisecondes la position de l'étoile guide au système de contrôle d'attitude qui utilise les roues de réaction pour réduire les écarts éventuels. Les mouvements de rotation destinés à pointer l'optique (changement de cible ou suivi d'objets mobiles) se font à vitesse réduite pour limiter les mouvements des ergols dans les réservoirs générateurs de vibrations qui peuvent durer jusqu'à 20 minutes[29]. Le JWST dispose de 8 petits moteurs-fusées pour désaturer les roues de réaction. Les capteurs solaires sont utilisés durant le déploiement du télescope spatial et lorsque celui-ci se retrouve en mode survie.
Notes et références
Références
- How spacraft fly - Spaceflight without formulae, p. 158-159
- How spacraft fly - Spaceflight without formulae, p. 50-68
- Techniques et technologies des véhicules spatiaux : volume 3 Plate formes, p. 382-392
- Techniques et technologies des véhicules spatiaux : volume 3 Plate formes, p. 393
- (en) Vincent Francois-Lavet, Attitude and Determination Control Systems for the OUFTI nanosatellites, (lire en ligne [PDF]).
- Techniques et technologies des véhicules spatiaux : volume 3 Plate formes, p. 348-350
- Techniques et technologies des véhicules spatiaux : volume 3 Plate formes, p. 350-353
- Techniques et technologies des véhicules spatiaux : volume 3 Plate formes, p. 354-353
- Techniques et technologies des véhicules spatiaux : volume 3 Plate formes, p. 353-354
- Space Vehicle Design, p. 365-366
- Techniques et technologies des véhicules spatiaux : volume 3 Plate formes, p. 402-405
- Techniques et technologies des véhicules spatiaux : volume 3 Plate formes, p. 398
- Techniques et technologies des véhicules spatiaux : volume 3 Plate formes, p. 405-408
- Space Vehicle Design, p. 366-368
- Space Vehicle Design, p. 370-371
- Techniques et technologies des véhicules spatiaux : volume 3 Plate formes, p. 400-402
- Space Vehicle Design, p. 371-372
- Space Vehicle Design, p. 368-371
- Space Vehicle Design, p. 372
- Space Vehicle Design, p. 373
- Techniques et technologies des véhicules spatiaux : volume 3 Plate formes, p. xx
- Techniques et technologies des véhicules spatiaux : volume 3 Plate formes, p. 354
- How spacraft fly - Spaceflight without formulae, p. 166-169
- Techniques et technologies des véhicules spatiaux : volume 3 Plate formes, p. 355
- Gary Quinsac, « Actionneurs inertiels », sur SESP (consulté le )
- (en) Ping Wang et al., « Satellite altitude control using only magnetorquers », American Control Conference, vol. 1, 21-26 jun 1998, p. 222–226 (DOI 10.1109/ACC.1998.694663, lire en ligne [PDF])
- Space Vehicle Design, p. 361
- (en) « JWST Pointing Performance », sur JWST User Documentation, STScI (consulté le )
- (en) « JWST Attitude Control Subsystem », sur JWST User Documentation, STScI (consulté le )
Bibliographie
- Collectif CNES, Techniques et technologies des véhicules spatiaux : volume 3 Plate formes, Cépaduès, (ISBN 2-8542-8478-X)
- (en) Michael D. Griffin et James R. French, Space Vehicle Design, Reston (Va), AIAA Education series, , 2e éd., 665 p. (ISBN 1-56347-539-1)
- Philippe Couillard, Lanceurs et satellites, Toulouse, Cépaduès, , 246 p. (ISBN 2-85428-662-6)
- (en) Graham Swinerd, How spacraft fly : spaceflight without formulae, Springer Praxis, , 272 p. (ISBN 978-0-387-76571-6)
- (en) Michel van Pelt, Space Invaders : how robotics spacecraft explore the solar system, Praxis, , 312 p. (ISBN 978-0-387-33232-1)
Voir aussi
Articles connexes
- Attitude (aérospatiale)
- Système de commande d'attitude et d'orbite
- Satellite artificiel
- Stabilisation par gradient de gravité
- Plateforme (astronautique)
- Capteurs
- Aspects de la physique
 Portail de l’astronautique
Portail de l’astronautique