Stabilisation par gradient de gravité
La stabilisation par gradient de gravité (en anglais : Gravity-gradient stabilization) est une méthode de stabilisation des satellites artificiels ou des objets spatiaux dans une orientation fixe en utilisant uniquement la distribution de masse et le champ gravitationnel du corps orbité.
Le principal avantage par rapport à l'utilisation de la stabilisation active avec des propulseurs, des gyroscopes ou des roues de réaction est la faible utilisation d'énergie et de ressources.
L'idée est d'utiliser le champ gravitationnel de la Terre et la force de marée pour maintenir le vaisseau spatial aligné dans l'orientation souhaitée. La gravité de la Terre diminue selon la loi en carré inverse, et en étendant le long axe perpendiculaire à l'orbite, la partie « inférieure » de la structure en orbite sera plus attirée par la Terre. L'effet est que le satellite aura tendance à aligner verticalement son axe de moment d'inertie minimum.
Un modèle explicatif simple

Il est possible de décrire l'effet d'un gradient de gravité sur l'attitude d'un satellite au moyen d'hypothèses simplificatrices[1] :
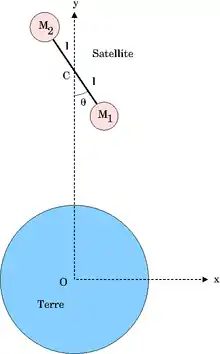
- le satellite considéré a la forme d'une haltère rigide de longueur 2 l, les deux extrémités ayant la même masse m, et la masse de la barre reliant les deux extrémités est considérée comme négligeable;
- le mouvement du satellite est de type képlérien non perturbé, résultant en un mouvement plan de mouvement moyen n;
- de même, seules les variations d'attitude du satellite dans ce même plan orbital sont considérées, ce qui conduit à n'avoir qu'un unique degré de liberté, noté , représentant le mouvement de tangage du satellite;
- le mouvement est étudié dans un référentiel géocentrique, le repère orthogonal associé tournant avec le satellite. L'axe du repère est choisi de sorte à relier à tout moment le centre de la Terre au centre de masse du satellite, et l'axe est orthogonal à , contenu dans le plan de l'orbite, dirigé suivant le mouvement du satellite. L'axe est orthogonal au plan de l'orbite;
- le mouvement axial du satellite, c'est-à-dire selon l'axe est négligé, la distance entre le centre de la Terre O et le centre de masse C du satellite est constante. Par suite, l'orbite est circulaire de rayon .





Un gradient de gravité représentant une différence d'accélération due à la gravité entre deux points du satellite, une approximation à l'ordre deux de l'accélération en un point M du satellite est recherchée à partir de la loi de la gravitation exprimée au point M :

avec la constante gravitationnelle géocentrique. Les distances entre deux points du satellite étant petites devant les distances au centre de la Terre, un développement limité au premier ordre du dénominateur peut être obtenu :


Ceci fournit une approximation à l'ordre deux pour l'accélération en M :

La dynamique en tangage du satellite est déterminée par le moment de la force gravitationnelle appliquée à chaque composante et du satellite, par rapport au centre de masse C :



Lorsque le satellite possède un angle de tangage , les deux composantes ont pour coordonnées , et , ce qui, avec , donne l'expression suivante pour la projection des deux moments gravitationnels (i = 1, 2) sur l'axe orthogonal au plan de l'orbite :





Le moment d'inertie central étant , l'équation de la dynamique de rotation autour du centre de masse et dans le plan orbital s'écrit :


soit encore :

dans laquelle apparaît le mouvement moyen n, du fait de la troisième loi de Kepler :


Cette équation différentielle décrit un mouvement de pendule appelé mouvement de libration. De plus, la valeur correspond à un point d'équilibre. Les petits mouvements autour de ce point d'équilibre peuvent être étudiés en approximant et , ce qui conduit à l'équation d'un oscillateur linéaire à un degré de liberté non amorti :




la fréquence de libration étant reliée au mouvement moyen par la relation . Du fait de l'absence d'amortissement, le point d'équilibre et est marginalement stable. Le gradient de gravité est donc en soi insuffisant pour complètement stabiliser l'attitude du satellite. Toute perturbation entraîne l'apparition d'une oscillation harmonique qui se maintient très longtemps. La stabilisation par gradient de densité est donc finalement obtenue en introduisant des mécanismes passifs d'amortissement dans la structure du satellite, par exemple au moyen de liaisons élastiques entre diverses composantes du satellite.


Notes et références
- Robert Guiziou, « Système de Contrôle d'Attitude et d'Orbite » (consulté le ).
- (en) Cet article est partiellement ou en totalité issu de l’article de Wikipédia en anglais intitulé « Gravity-gradient stabilization » (voir la liste des auteurs).
 Portail de l’astronautique
Portail de l’astronautique  Portail de la physique
Portail de la physique