Quadrirotor FPV
Un « Quadrirotor FPV » ou « Drone de course quadrirotor à pilotage en immersion » (également appelé « Quadcopter FPV » ou Kwad, de l'anglais : FPV Quadcopter) fait partie de la famille des drones de loisirs radiocommandés.


Un quadrirotor FPV est un aéronef miniature à quatre hélices pilotable à distance et équipé d'un système de diffusion vidéo adapté au pilotage en immersion. Il peut être de forme et de dimensions variées, sont poids n'excédant généralement pas quelques centaines de grammes avant mais aujourd'hui certains drones FPV dépassent largement les 250 grammes.
Le pilotage en immersion (en anglais : First Person View ou FPV) consiste à diriger un véhicule, ici un drone, grâce à une radiocommande et un visiocasque sans fil permettant de visualiser en direct la vidéo diffusée par une caméra fixée à l'avant du véhicule, le pilote ayant la sensation d'être à bord de l'appareil.
Ce type de drone est utilisé dans les disciplines « FPV Racing » (courses de drones) et « FPV Freestyle » (voltige acrobatique) grâce à ses capacités de réactivité, de manœuvrabilité, d'accélération et ses vitesses élevées mais l'autonomie d'un drone performant est très faible (2 à 5 minutes environ). Il est aussi utiliser dans la vidéo ou pour des marques ou pour le cinéma . Le FPV est de plus en plus accessibles et connues en ces deniers temps grâce au vidéo poster sur la plateforme YouTube .
Le « FPV Racing » est une discipline inspirée des systèmes FPV et qui consiste à faire concourir jusqu'à 8 pilotes simultanément dans une course de vitesse à travers un circuit disposant de portes (gates) qu'il faut franchir. Cette discipline est née en France à Argonay (Haute-Savoie) en 2014[1], à l'origine ces courses étaient réalisées dans les bois, les drones étant équipés d'éclairages arrière à LED, le spectateur se trouve alors immergé dans un vol à bord d'un drone à la manière des courses de pods du film Star Wars: La menace fantôme.
Le « FPV Freestyle », discipline elle aussi inspirée des systèmes FPV, consiste à réaliser des vols composés d'enchaînements de figures acrobatiques, souvent sans avoir recours à d'autres obstacles que ceux déjà présents sur un terrain naturel ou construit.
Le FPV cinématique , est une discipline qui utilise le fpv freestyle pour créer certaines images époustouflantes, le FPV cinématique est utiliser pour les certains films ou émission télé , un est aussi utile dans des vidéos publicitaire de certaines marque .
Drone
.jpg.webp)
Ce type de drone se vend en général en pièces détachées, son montage nécessite de réaliser des soudures électroniques, les puissances que peuvent dégager les batteries sont importantes, il convient donc de posséder quelques notions de base de sécurité en environnement électronique. Cependant il existe des boutiques qui effectuent la vente et le montage des drones prêts à voler.
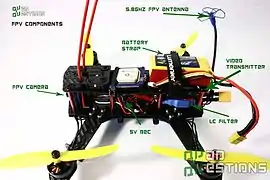
Un quadrirotor FPV se compose de différents organes qui sont détaillés ici.
Châssis
Le châssis (ou en anglais, « frame ») du drone lui donne sa forme. Le châssis d'un quadcopter a quatre bras, aux extrémités desquels seront placés les moteurs, la partie centrale, normalement protégée, servant à installer l'électronique embarquée. Les châssis sont fabriquées en fibre de carbone pour l'essentiel mais la fibre de verre ou le plastique renforcé ont aussi été utilisés. Le châssis doit être suffisamment solide pour ne pas se briser au moindre choc car les chutes sont nombreuses.
Les châssis utilisées en FPV ont généralement une forme en +, en X ou en H, leurs dimensions varient habituellement de 80 à 250 mm (diagonales d'entraxes moteurs).
Carte de vol (FC)
.jpg.webp)
La carte de vol (en anglais « flight controller » ou FC) est la carte principale, elle intègre le microcontrôleur principal chargé du comportement en vol et qui traite les données parvenant des différents périphériques qui lui sont connectés.
La carte de vol reçoit et gère les données émises par la radiocommande du pilote à travers le récepteur radio (Rx) auquel elle est connectée (via un bus de données PPM, SBUS, iBUS...). Elle traite les données du gyroscope intégré, applique des corrections en fonction des paramètres définis et fourni aux ESC un signal PWM commandant la puissance délivrée aux moteurs.
En fonction du type de carte ou de sa génération, il existe un large éventail de fonctionnalités optionnelles qui peuvent être gérées par la carte de vol (Télémétrie, OSD, bipeur (Buzzer), boîte noire (Blackbox), RSSI, LED RVB…)
La carte de vol intègre un logiciel embarqué (en anglais « firmware ») qui est le microprogramme chargé de son fonctionnement. Ce firmware étant écrit sur une mémoire réinscriptible, il permet d'être flashé et mis à jour. Le but de ces mises à jour étant d'accroître la stabilité du système, d'améliorer le comportement de la machine et d'apporter des fonctionnalités supplémentaires.
Pour paramétrer la carte de vol, il est nécessaire d'utiliser le logiciel de configuration correspondant au firmware installé. Il existe des firmwares comme LibrePilot (en), Cleanflight, Betaflight, Butterflight qui sont des logiciels libres sous licence GPL (Butterflight étant un fork de Betaflight qui est un fork de Cleanflight qui lui-même est un fork de Baseflight) et d'autres comme KissFC ou Raceflight qui sont des logiciels propriétaires.
La carte de vol emporte :
- 1 microcontrôleur principal.
Les microcontrôleurs STM32 du fabricant STMicroelectronics sont courants (F1, F3, F4, F7). Les microcontrôleurs des séries F1 et F4 ne comportent pas d'inverseur matériel (en anglais « hardware inverter ») sur le port SBUS. Celui-ci est nécessaire pour acquérir les données SBUS via le connecteur JST (en) de certains récepteurs Rx à la norme FrSky dont le signal SBUS est inversé. Certains constructeurs de carte de vol intègrent un inverseur matériel additionnel mais si la carte de vol n'en est pas pourvue, cela implique de souder le fil du signal SBUS directement sur une pastille du circuit du récepteur Rx dont le signal n'est pas inversé[2]. Aujourd'hui, l'utilisation du protocole série FPort qui combine SBUS et télémétrie Smarport sur un fil unique, sans avoir recours à un signal inversé, élimine ce problème et permet de libérer un port UART pour une autre utilisation[3].

- 1 gyroscope, couramment des InvenSense (en) MPU de la série 6000 (échantillonnage 8 kHz) et des Invensense ICM20608 (échantillonnage 32 kHz) sur certaines cartes à microcontrôleur F7.
- 1 régulateur de tension à faible chute 5 volts (en anglais « Low-dropout regulator (en) » ou LDO) pour alimenter ses propres circuits 5 V, les sorties PWM et les périphériques 5V comme le récepteur Rx, la caméra...
- x sorties PWM couplées à des sources 5V + masse (5 V + GND) fournissant le signal de commande des moteurs et l'alimentation 5V aux ESC. Un quadrirotor nécessite 4 sorties PWM soit une sortie PWM par moteur.
- 1 port PPM/sBUS/iBUS pour connecter le récepteur Rx (ce port utilise un port UART, son numéro peut varier en fonction des cartes)
- x ports UART (leur nombre dépendant du modèle de carte de vol) permettant de réaliser des liaisons série entre les différents périphériques câbles à la carte de vol en utilisant divers bus de données (sBUS, iBUS, PPM, bus de télémétrie...)
- 1 bus SPI (nécessitant 4 fils pour chacun des signaux: SCLK, MOSI, MISO et SS) pour connecter des récepteurs Rx utilisant ce protocole par exemple.
- 1 port bipeur (buzzer).
- x LED d'état.
Certaines carte de vol peuvent également comporter :
- Capteur de courant (Current sensor), permettant à la carte de vol d'acquérir la consommation électrique totale de la machine (nécessitant l'alimentation directe de la carte de vol sur la batterie, la carte de vol redistribuant ensuite la tension batterie aux différents organes comme les ESC, le VTx…).
- Carte microSD pour enregistrer le flux vidéo de la caméra ou sauvegarder les données de la fonction boite noire (blackbox).
- L'entrée vidéo et une source 5V pour la caméra, permettant à la carte de vol d'acquérir la vidéo pour y afficher des informations en surimpression (OSD) avant de transmettre au VTx par l'intermédiaire du port qui lui est dédié.
- La sortie VTx et une source 5 V (ou une source batterie) permettant de transmettre au VTx la vidéo de la caméra acquise par la carte de vol qui a intégré des informations en surimpression (OSD).
- Le port pour LED RVB.
- …
Contrôle de la carte de vol

les cartes de vol comportent parfois une prise micro USB mais plus souvent un port UART (port série). Les protocoles de communication de ces ports sont définis par le RFC 2217[4].
Un contrôleur USB vers UART permettant de connecter la carte de vol à un ordinateur pour pouvoir la configurer. Les contrôleurs USB vers UART que l'on rencontre le plus souvent sont : CP210x du fabricant Silicon Labs (en), STM Virtual COM Port de STMicroelectronics, CH340 de WinChipHead, PL2303 de Prolific, FT232 de FTDI, ou encore les AX781x0 d'ASIX (en)[5]. Il est également possible d'utiliser les cartes Arduino Nano ou Uno comme adaptateur USB ↔ série.
Sous Microsoft Windows, un pilote tiers fourni par le fabricant du contrôleur est nécessaire, il installe un périphérique de communication virtuel (en) (Virtual COM Port) (équivalent au port ttyS sous UNIX et lui attribue un port COM suivi de son numéro d'identification (COM3 par exemple), ce périphérique de communication virtuel est visible dans la section "Ports" du gestionnaire de périphériques et permet de réaliser une liaison série entre l'ordinateur et la carte de vol.
Sous GNU/Linux, ces pilotes sont généralement présents par défaut, ce qui permet au contrôleur USB vers UART d'être reconnu immédiatement, le système lui attribuant une entrée dans le répertoire « /dev » en tant que périphérique « ttyS » (équivalent à un port COM virtuel sous Windows) permettant la communication série entre l’ordinateur et la carte de vol.
Régulateurs de vitesse (ESC)
.jpg.webp)
Les régulateurs de vitesse (en anglais « Electronic Speed Control » ou ESC) sont chargés de transformer le courant continu en provenance de la batterie en courant triphasé utilisé pour faire tourner les moteurs. les ESC sont pilotés par la carte de vol qui les commande à l'aide d'un signal PWM.
Il existe des ESC à l'unité (soit 4 par drone) ou des ESC dits « 4 en 1 » qui regroupent 4 ESC sur un même circuit.
Moteurs
.jpg.webp)
Les Moteur sans balais (en anglais « brushless », sont des moteurs de petite taille, particulièrement puissants avec une faible consommation d’énergie. Ce sont des moteurs à courant triphasé produit par les ESC.
Ils ont diverses dimensions des petits 1104 à des plus gros 2307.
Une donnée importante est leur constante de vélocité (en) exprimée en kV qui permet de choisir le type d'hélices et le pas approprié.
Hélices
.jpg.webp)
Il existe différents types et formes d'hélices (en anglais : propellers) qui vont avoir un comportement en vol différent. Elles peuvent généralement avoir de 2 à 6 pales, mesurer de 2 à 6 pouces de diamètre en fonction du format du châssis. La notion de pas de l'hélice est aussi importante que sa taille, elle a un impact direct sur le comportement, l'accélération et la vitesse maximale du drone. Les hélices sont choisies en fonction des moteurs, de leur la taille, de leur puissance et de leur constante de vélocité (en).
Récepteur radio (Rx)
Le récepteur radio (en anglais « Receiver » ou Rx) permet de recevoir les données émises par la radiocommande du pilote et de les transmettre à la carte de vol par l’intermédiaire d'un port UART que l'on configurera pour communiquer via un bus du type PPM, SBUS, iBUS... selon les configurations.
Transmetteur vidéo (VTx)
Le transmetteur vidéo (« Video Transmitter » ou VTx) est relié à la caméra et fixé sur le drone, le VTx émet l'image de la caméra sur des bandes de fréquences qui peuvent être 1,2 GHz, 2,4 GHz et 5,8 GHz permettant à tout dispositif compatible et à portée de recevoir l'image diffusée.
Seules les fréquences de 5 725 MHz à 5 875 MHz sont autorisées en France, la puissance d'émission maximale autorisée étant de 25 mW[6].
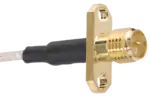
Le VTx en fonctionnement doit être relié à une antenne pour pouvoir diffuser la vidéo et pour lui éviter une surchauffe due à l'absence d'antenne.
Des connecteurs coaxiaux type RP-SMA, fixés en queue du châssis central permettent de visser différents types d'antennes et de les changer en fonction de l'utilisation désirée du drone. Il existe différents types d'antennes, en forme de bâton, de spirale, etc. La tendance est aujourd'hui (en 2018) d'en mettre 2) afin d'augmenter la probabilité d'un bon échange avec le capteur du pilote, qui comporte également deux antennes.
Voir la section Antennes radio pour plus de détails.
Caméra

La caméra est un élément essentiel pour le FPV. La priorité de la caméra FPV n'est pas donné à la haute définition, mais à la réduction de la latence entre la prise de vue du capteur et la visualisation par le pilote dans ses lunettes. car le pilote doit pouvoir réagir en synchronisations avec la situation de l'appareil. La résolution doit donc être suffisamment élevée pour voir la situation, mais également suffisamment basse pour pouvoir la traiter rapidement et la transmettre au récepteur. Une caméra annexe de haute qualité peu et est souvent ajoutée, afin de permettre de visualiser plus tard le vol en haute définition.
Les caméras sont souvent de format mini ou micro et utilisent des capteurs CCD ou CMOS de petite dimension (régulièrement 1/3") avec des résolutions verticales allant de 600 à 1 200 TVL (de l'anglais : TV-Lines, ligne de télévision).
Certaines caméras sont lentes dans la balance dynamique du contraste et de l'intensité lumineuse, l'aptitude de la caméra à pouvoir balancer rapidement les changements de contraste en cours vol améliore l'expérience de pilotage.
Batteries
.jpg.webp)
Les batteries (accumulateurs) les plus fréquemment utilisées sont de technologie Lithium Polymère ou LiPo, ont une tension nominale par cellule de 3,7V et une tension maximale en fin de charge de 4,2V.
Ces batteries sont souvent montées en série (S) pour que leurs tensions (4,2 V) s'additionnent : 1S = 4,2 V ; 2S = 8,4 V ; 3S = 12,6 V ; 4S = 16,8 V...
La capacité d'une batterie est notée C et exprimée en Ah. On trouve régulièrement des batteries 4S de 1 300 à 1 600 mAh (1 Ah = 1 000 mAh) montées sur ce type de drone.
Un autre indicateur important est l'intensité maximale que la batterie peut fournir lors de la décharge. Elle est exprimée en proportion de la capacité C de la batterie (75 C, 95 C, 100 C...) : 75×1,3 Ah = 97,5 A ; 95×1,6 Ah = 152 A... Sur un drone très performant, une batterie capable de fournir une intensité élevée est nécessaire.
Le choix de la batterie consistant souvent en un compromis poids / autonomie, le poids et l'inertie de la batterie ont un effet non négligeable sur le comportement du drone en vol.
Radiocommande
La radiocommande permet de piloter le drone à distance. Elle communique avec le Rx du drone sur la bande des 2,4 GHz. Les radiocommandes pour la pratique du quadrirotor FPV sont couramment équipées de 2 mini-manches ou « gimbals » pour actionner les mouvements du drone: les gaz (« throttle »), le lacet (« yaw » ou « rudder » (palonnier)), le roulis (« roll » (roulis) ou « aileron ») et le tangage (« pitch » ou « elevator ») ainsi que d'un interrupteur pour l'armement des moteurs préalable au vol. Des interrupteurs supplémentaires pouvant être attribués à d'autres fonctions pour contrôler plus finement la machine.
Certaines radiocommandes embarquent un microcode (anglais : firmware) sous logiciel libre, comme OpenTX (GPLv2[7]), un firmware populaire utilisé dans certains modèles de radiocommande à la norme FrSky comme les FrSky Taranis de série X7, X9, X10 et X12[8].
Équipement de réception vidéo

Le passage du drone derrière des obstacles peut entraîner une perte partielle à totale du signal. Une perte partielle se traduit par un bruit supérieur au signal, générant un Bruit blanc (anglais : glitchs) sur une partie plus ou moins importante de l'image final. Cela peut gêner la visualisation du pilote.
Les récepteurs ont de plus en plus souvent deux antennes et certains systèmes tels que Clearview ou RapidFire, permettent de filtrer la réception de deux images, afin de tirer le meilleur de chacune d'elles lorsqu'il y a du bruit, afin de restituer la meilleure image possible.
Antennes radio
Il existe différents types d'antennes. elles sont toutes montées sur un connecteur SMA, permettant de le connecter au connecteur RP-SMA du drone, ou du récepteur de commande et vidéo. Parmi les types les plus courantes, on peut citer :
Des bâtons droits, comme on en trouve sur des routeurs Wi-Fi, elle est omnidirectionnelle. De forme la plus simple, mais aussi la moins efficace[9].
Les patchs, de formes carrées, utilisées exclusivement sur le récepteurs vidéo. Elles sont omindirectionnelles mais ont une portée limitée[9].
Des antennes hélicoïdales, elles ont un champ plus directionnel mais également une meilleure portée, le nombre de tour de la spirale joue sur le cône de réception. On les trouve notamment en 3,5 tours ou 7 tours.
Les antennes dites en trèfle ou cloverleaf (signifiant feuille de trèfle), qui forment généralement trois boucles se limitant à un hémisphère. Elles sont assez polyvalente mais n'ont pas non plus une portée aussi importante que les spirales. Elles sont également relativement simple à créer soi-même[10]. Elles sont bien adaptées aux drone lui-même de par leur légerté et leur champs de rayonnement de 360°[9].
L'antenne Pinwheel SL de Terrybuild plus rarement utilisée, reprend les caractéristiques de l'antenne en trèfle, mais avec quatre lobes plus grandes et plus de rigidité. Elle peut être adapté au drone et au récepteur[9].
Ces deux formats d'antennes, se retrouvent également sous la forme champignon (en anglais Mushroom ou encore Spironet), elles comportent alors un cache les couvrant[9].
La Fabrique circulaire, un artisan spécialisé dans la création d'antennes, en fabrique également à cinq lobes, elles sont généralement appréciées de amateurs passionnés.
Antennes de type pagoda (signifiant pagode), antenne open source[11], que l'on peut également trouver en kit), composée d'un câble coaxial à mémoire de forme, et d'un empilement de disques en circuit imprimé (PCB) à son extrémité[12].
Masque / Lunettes FPV
Les Lunettes de FPV intègrent généralement une antenne de réception. Ce qui permet de recevoir directement le signal. Il existe cependant des modules externent qui peuvent améliorer la réception.
Modules de réception USB
Il existe également des modules de réception (comme les Eachine ROTG01 et ROTG02), se connectant en USB (port OTG d'un téléphone ou USB d'un ordinateur) et utilisant le protocole standard UVC pour la transmission de la vidéo. On peut les monter sur des lunettes. Ils ont l'avantage d'être à bon prix et utilisable sur différents périphériques, mais l'inconvénient d'avoir un temps de latence généralement élevé.
Galerie d'images
- Détail des éléments
 Quadrirotor FPV équipé d'une GoPro
Quadrirotor FPV équipé d'une GoPro Pilotes lors d'une course de FPV Racing
Pilotes lors d'une course de FPV Racing Départ d'une course de FPV Racing
Départ d'une course de FPV Racing Gates sur un circuit de FPV Racing
Gates sur un circuit de FPV Racing OSD
OSD
Annexes
Notes et références
- « Les courses de drones: le sport mécanique de demain », sur lemonde.fr,
- (en) « Uninverted SBUS and Smart Port on Frsky Receivers », sur Oscar Liang, (consulté le )
- (en) « How to Setup Frsky FPort », sur Oscarliang.com
- (en) Request for comments no 2217.
- https://www.asix.com.tw/products.php?op=ProductList&PLine=74&PSeries=109
- « Emissions vidéo 25 mW, les premières mesures », sur helicomicro,
- « Licence », sur Github
- (en) « v1.0 release notes », sur betaflight-tx-lua-scripts sur Github
- Alex Team Zigogne, « Les antennes FPV pour les nuls », sur FPV Passtion.fr, 14 déceembre 2013
- Fred, « Une antenne Cloverleaf », sur Helicomicro.com,
- (en) « Pagoda antenna », sur Maarten Baert(s website
- « Les antennes Pagoda et ce qu’il faut savoir sur les antennes FPV 5.8 ghz et leurs modifications », sur FPV-passion.fr
Articles connexes
Liens Externes
- Usage d'un drone de loisir Ministère de l'environnement, de l'énergie et de la mer]
- Fédération Professionnelle du Drone Civil
- Fédération Française d'Aéromodélisme (FFAM)
- Wiki FPV, un Wiki pour débuter dans le FPV
- http://www.xavdrone.com
- http://www.fpv-passion.fr
- https://www.rotormatch.com
- The Guardian
- PC World, magazine et site web sur la nouvelle technologie
- Pc Adivsor, magazine et site web sur la nouvelle technologie
- Tested, chaine YouTube et site web sur la nouvelle technologie
- Retour en images sur le 1er festival de drones sur les Champs-Élysées
 Portail des technologies
Portail des technologies  Portail de l’aéronautique
Portail de l’aéronautique  Portail de l’aéromodélisme
Portail de l’aéromodélisme