Réseau bayésien dynamique
Un réseau bayésien dynamique ou temporel (souvent noté RBD, ou DBN pour Dynamic Bayesian Network) est un modèle statistique et stochastique qui étend la notion de réseau bayésien. À la différence de ces derniers, un réseau bayésien dynamique permet de représenter l'évolution des variables aléatoires en fonction d'une séquence discrète, par exemple des pas temporels[1]. Le terme dynamique caractérise le système modélisé, et non le réseau qui lui ne change pas.
Intuition

Un réseau bayésien est un modèle graphique probabiliste qui, à partir de variables aléatoires structurées en un graphe orienté acyclique, permet de calculer des probabilités conditionnelles liées à ces variables. Les réseaux bayésiens dynamiques étendent ce processus en prenant en compte l'évolution des variables aléatoires, généralement dans le temps.
Un exemple de réseau bayésien serait, dans le diagnostic médical, de déterminer la probabilité pour un patient d'avoir une maladie en fonction de ses symptômes. Ce système peut ensuite être rendu « dynamique » en y intégrant le fait que la probabilité d'être malade au temps t dépend également de la probabilité passée. Intuitivement, cela signifie que le risque évolue dans le temps. La variable modélisant le risque d'avoir une maladie donnée est dite dynamique, temporelle ou persistante.

Définition
Il convient de rappeler d'abord brièvement la définition d'un réseau bayésien : un réseau bayésien est un graphe orienté acyclique G = (V, E), avec V l'ensemble des nœuds et E l'ensemble des arcs reliant les nœuds. Une distribution de probabilité conditionnelle est associée à chaque nœud x, et la probabilité jointe factorisée sur l'ensemble de V est (avec pa(x) l'ensemble des parents de x)[2] :

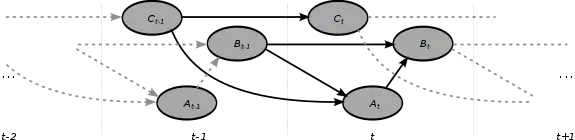
Formellement, un réseau bayésien dynamique se définit comme un couple ). est un réseau bayésien classique représentant la distribution a priori (ou initiale) des variables aléatoires ; dit plus intuitivement, il s'agit du temps 0. est un réseau bayésien dynamique a deux pas de temps décrivant la transition du pas de temps t-1 au pas de temps t, c'est-à-dire pour tout nœud x appartenant à V, dans un graphe orienté acyclique G=(V, E) comme introduit plus haut. La probabilité jointe d'un pas de temps s'écrit alors[3],[4] :





Les parents d'un nœud, notés , peuvent ainsi être soit un parent direct dans le réseau au temps t, soit un parent direct au temps t-1.

La loi de probabilité jointe factorisée se calcule en « déroulant » le réseau sur la séquence temporelle, à condition de connaître sa longueur, que l'on va noter ici T. Formellement, si est la probabilité jointe du réseau initial , donc au pas de temps 0, on peut écrire[3],[4] :


Un réseau bayésien dynamique respecte ainsi la propriété de Markov, qui exprime que les distributions conditionnelles au temps t ne dépendent que de l'état au temps t-1 dans un processus stochastique. Les réseaux bayésiens dynamiques sont une généralisation des modèles probabilistes de séries temporelles de type modèle de Markov caché, filtre de Kalman[4]...
Annexes
Articles connexes
Références
- (en) Thomas Dean et Keiji Kanazawa, « A model for reasoning about persistence and causation », Computational Intelligence, vol. 5, no 2, , p. 142-150 (lire en ligne)
- Jean-Jacques Boreux, Éric Parent et Jacques Bernier, Pratique du calcul bayésien, Paris/Berlin/Heidelberg etc., Springer, , 333 p. (ISBN 978-2-287-99666-5, lire en ligne), p. 38-39
- (en) Kevin Patrick Murphy, Dynamic Bayesian Networks : Representation, Inference and Learning, université de Californie à Berkeley, (lire en ligne), p. 14-15 (thèse)
- Roland Donat, Philippe Leray, Laurent Bouillaut et Patrice Aknin, « Réseaux bayésiens dynamiques pour la représentation de modèles de durée en temps discret », Journées francophone sur les réseaux bayésiens, (lire en ligne)
 Portail des probabilités et de la statistique
Portail des probabilités et de la statistique  Portail de l’informatique
Portail de l’informatique