Robot médical
Un robot médical est un système robotique utilisé dans le cadre d'une application thérapeutique, par exemple lors d'une chirurgie ou au cours d'un programme de réhabilitation neuromotrice. Il fait partie du domaine de la cobotique. Du fait des contraintes importantes en matière de sécurité, ce type de robot est en général doté d'un faible niveau d'autonomie.
Historique
Le premier robot chirurgical au monde est le Arthrobot, développé et utilisé pour la première fois à Vancouver en 1983. L'équipe à l'origine de ce robot était constituée du docteur James McEwen, ingénieur biomédical, Geof Auchinleck, un étudiant diplômé en génie physique de l'UBC le docteur Brian Day, chirurgien, ainsi qu'un groupe d'étudiants en ingénierie. Le tout premier robot fut utilisé le lors d'une opération de chirurgie orthopédique au UBC Hospital de Vancouver. Plus de 60 interventions d'arthroscopie furent réalisées la première année et en 1985 un documentaire sur les robots industriels de National Geographic The Robotics Revolution présenta l'appareil[1],[2].
Outre ce robot assistant chirurgien qui donnait les instruments chirurgicaux par commande vocale[3], on peut citer, parmi les autres appareils robotisés développés à la même époque, un bras robotisé de laboratoire médical[réf. souhaitée].
La société Computer Motion est pionnière dans le domaine des robots médicaux, avec l'AESOP, utilisé au Canada, puis le ZEUS, utilisé en Europe. En 2003, les sociétés Intuitive Surgical et Computer Motion fusionnent[4] en gardant le nom d'Intuitive Surgical. Le ZEUS est alors abandonné au profit du Da Vinci.
Parmi les pistes nouvelles pour la recherche et développement figure les nanorobots et la robotique molle.
Les robots médicaux en usages
De nombreux robots médicaux sont en usage dans le monde. On peut distinguer deux sortes de robots médicaux
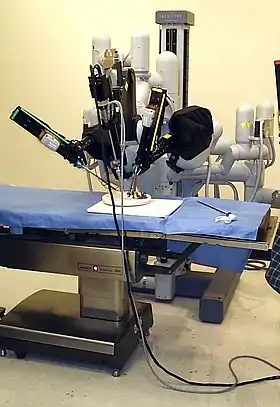
D'une part, les robots interventionnels, utilisés en chirurgie. Le robot le plus utilisé aujourd'hui dans ce secteur est le robot Da Vinci. Il est utilisé, principalement aux États-Unis et en Europe[5], pour diverses opérations chirurgicales dites mini-invasives dans les cavités abdominales et thoraciques des patients. Son application principale est la chirurgie de la prostate : 60 % des opérations de la prostate aux États-Unis ont eu recours à un Da Vinci[5]. D'autres systèmes de chirurgie robotisés ont vu le jour ces dernières années. Le dispositif ROSA est dédié aux procédures crâniennes mini-invasives, ou encore le Sensei pour traiter les troubles du rythme cardiaque. Le Cyberknife est un autre exemple, qui sert à détruire des tumeurs de manière non-invasive. Il repère l’emplacement de la tumeur et la cible en continu pendant l’intervention. Les robots dits porte-endoscope servent à assister le chirurgien lors d'une opération en maintenant la caméra lors d'une endoscopie. Des robots comme l'EndoAssist ou le Viky[6] sont utilisés dans les hôpitaux dans ce but. Enfin, certains robots ne sont pas utilisés directement pour assister le geste chirurgical lui-même, mais pour des tâches annexes dans la salle d'opération. C'est le cas du système Artis Zeego[7], qui permet de déplacer le plan d'imagerie d'un système de fluoroscopie en temps-réel lors d'une opération.
D'autre part, les robots utilisés pour la rééducation de patients, par exemple à la suite d'un accident vasculaire cérébral. C'est le cas par exemple des systèmes Lokomat et In-Motion, qui assistent le travail de réhabilitation du patient en fournissant une aide robotisée. De nombreuses recherches sont en cours pour l'utilisation d'exosquelettes dans la réhabilitation[8],[9], mais ceux-ci n'ont pas encore atteint le stade commercial.
Domaines d’utilisation
Limitations
L’équipement actuel est très coûteux. De ce fait, la robotique médicale est très peu utilisée. L'évaluation de l'intérêt d'une chirurgie robotisée pour le patient, par rapport à une chirurgie conventionnelle, est limitée et certains se posent la question de la qualification des chirurgiens opérant essentiellement par robot et qui risquent alors de manquer d'expérience lorsqu'une intervention conventionnelle est requise[10].
En rééducation, divers robots également coûteux sont utilisés. Une revue de 2018, comparant notamment l'efficacité de la rééducation par des robots de thérapie miroir par rapport à des rééducations moins sophistiquées, conclut que la qualité des études menées dans ce champ est très faible malgré de forts investissements publics[11]. Il n'est donc pas raisonnable selon les auteurs d'investir dans ce type de dispositif de rééducation.
Notes et références
- (en) Olga Lechky, « World's first surgical robot in B.C. », The Medical Post, vol. 21, no 23, (lire en ligne [PDF])
- (en) « Background and History of Surgical Robotics », sur allaboutroboticsurgery.com (consulté le )
- (en) [vidéo] Arthrobot - the world's first surgical robot sur YouTube
- (en) « Healthcare Equipment and Supplies : Company Overview of Computer Motion, Inc. », sur investing.businessweek.com (consulté le )
- Science & Vie Hors Série « Le siècle des robots » p. 51
- http://www.endocontrol-medical.com/viky_ep.php
- http://usa.healthcare.siemens.com/surgical-c-arms-and-navigation/hybrid-or/artis-zeego
- http://www.ric.org/research/centers/teamm-rerc/robot-exoskeleton-for-stroke/
- Nathanaël Jarrassé, Contributions à l'exploitation d'exosquelettes actifs pour la rééducation neuromotrice, thèse, Automatic, université Pierre-et-Marie-Curie, Paris VI, 2010.
- (en) Naomi Lee, « Robotic surgery: where are we now? », Lancet, 2014;384(9952):1417. DOI:10.1016/S0140-6736(14)61851-1
- (en) Nelly Darbois, Albin Guillaud et Nicolas Pinsault, « Do Robotics and Virtual Reality Add Real Progress to Mirror Therapy Rehabilitation? A Scoping Review », Rehabilitation Research and Practice, vol. 2018, , p. 1–15 (ISSN 2090-2867 et 2090-2875, DOI 10.1155/2018/6412318, lire en ligne, consulté le )
Bibliographie
- Jérémie Guiochet, Sécurité des Systèmes de la Robotique Médicale, Ed. Techniques Ingénieur, (lire en ligne)
- (en) Laparoscopic and robot-assisted surgery in urology : atlas of standard procedures, Heidelberg, Springer, (ISBN 978-3-642-00891-7 et 3642008917, OCLC 733543631, lire en ligne)
- Jocelyne Troccaz, Robotique médicale, Cachan, Hermès science publications-Lavoisier, , 447 p. (ISBN 978-2-7462-3218-1 et 2746232189, OCLC 800963441, lire en ligne)
 Portail de la médecine
Portail de la médecine  Portail de la robotique
Portail de la robotique